7. Принцип действия и основные характеристики следящих электроприводов
Следящие электроприводы применяются в механизмах подач станков с ЧПУ и роботах. Функциональная схема следящего электропривода подачи представлена на рис. 21.
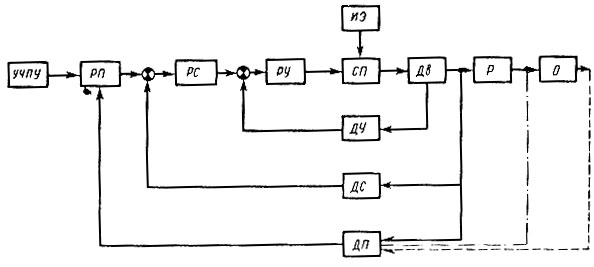
Рис. 21. Структурная схема следящего привода подачи: УЧПУ - устройство числового программного управления, РП, РС, РУ - регуляторы положения, скорости и ускорения, ДУ, ДС, ДП - датчики ускорения, скорости и перемещения, ИЭ - источник энергии, СП - силовой преобразователь, Дв - двигатель, Р - редуктор, О - объект
Следящий электропривод построен по принципу подчиненного регулирования и содержит три контура: положения, скорости и ускорения. Основной, внешний контур, или контур положения, включает УЧПУ, регуляторы положения (РП), датчики перемещения (ДП), двигатель (Дв), редуктор (Р) и объект (О). В зависимости от требований, предъявляемых к статическим и динамическим характеристикам объекта, и в соответствии с его конструктивными особенностями обратная связь по перемещению может охватывать не только двигатель, но и редуктор и объект (показано штрихпунктиром и пунктиром соответственно).
Рассмотрим функциональное назначение элементов контура положения. Двигатель Дв под действием системы управления передает движение редуктору и объекту таким образом, чтобы изменение угла поворота во времени валов (или линейное перемещение объекта) было пропорционально изменению сигнала задания по перемещению, вырабатываемого в УЧПУ. Основные характеристики двигателя были рассмотрены ранее.
Принципы действия датчиков перемещения, применяемых в механизмах подач станков с ЧПУ и роботах, довольно многообразны.
В зависимости от места установки датчики перемещения могут быть линейными или круговыми. Датчики перемещения формируют сигнал, содержащий информацию о перемещении. С выхода датчика перемещения сигнал поступает на вход УЧПУ. Выходные сигналы могут быть импульсной или синусоидальной формы, но они стандартизованы, что позволяет применять один и тот же датчик с УЧПУ разных типов.
Функции, выполняемые УЧПУ, многообразны; рассмотрим те из них, которые относятся к управлению следящим электроприводом.
В соответствии с заданной программой УЧПУ формирует сигнал задания, определяющий закон перемещения объекта во времени. УЧПУ, получив сигнал от датчика перемещения, сравнивает его с сигналом задания. Разность этих двух сигналов после соответствующего преобразования подается на вход второго контура, именуемого контуром скорости, или регулируемым приводом.
Рассмотрим подробнее процедуру формирования сигнала, управляющего регулируемым приводом.
В ранних УЧПУ задающий сигнал S3 формировался в традиционном виде для большинства следящих систем: S3 = f(t). Поступающий от датчика перемещения ДП сигнал Sдп, пропорциональный перемешению, вычитался из данного:  - разность между заданным и пройденным перемещением.
- разность между заданным и пройденным перемещением.
В современных УЧПУ задающий сигнал формируется в виде v3 = f(t), где v3 - заданная скорость перемещения объекта. Информацию о перемещении УЧПУ преобразует вид Vдп = f(t) путем вычисления приращения перемещения за некоторый период времени (Vдп - скорость перемещения ДП, кинематически связанного объектом с О). На вход регулируемого привода поступает сигнал управления:

где  Таким образом, сигнал пропорционален разности между заданным и пройденным перемещением. Наряду с основным сигналом
Таким образом, сигнал пропорционален разности между заданным и пройденным перемещением. Наряду с основным сигналом  может вводиться сигнал
может вводиться сигнал 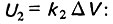 для форсировки пуска двигателя он суммируется с а для плавного торможения вычитается. Могут быть сформированы и другие сигналы, но они носят либо вспомогательный характер, либо вводятся для целей диагностики.
для форсировки пуска двигателя он суммируется с а для плавного торможения вычитается. Могут быть сформированы и другие сигналы, но они носят либо вспомогательный характер, либо вводятся для целей диагностики.
Для построения замкнутой системы следящего привода, вообще говоря, достаточно лишь одного внешнего контура, содержащего информацию о перемещении. Однако из теории управления известно, что наличие информации не только о выходной величине (пути), но и о ее производных (скорости, ускорении и т. д.) дает возможность достаточно точно сформировать требуемую форму переходных процессов, т. е. создать систему с заданными динамическими параметрами.
Прежде чем анализировать работу следящих электроприводов при обработке сложных деталей, будем условно называть рабочим органом узел станка или робота, перемещающийся в плоскости или в пространстве, а объектом - этот же узел, перемещающийся вдоль одной из осей. Так, трехкоординатный стол вертикально-фрезерного станка с ЧПУ может двигаться по различным траекториям как в горизонтальной плоскости, так и в пространстве (если вертикальная координата перемещает стол, а не инструмент) или же вдоль какой-либо одной оси. В соответствии с двумя видами движения различают контурную ошибку - отклонение траектории истинного движения рабочего органа от заданной и ошибку слежения δ - разность между заданным S3 и истинным перемещениями объекта вдоль одной оси:  - истинное перемещение объекта (в отличие от
- истинное перемещение объекта (в отличие от  - перемещения датчика), причем
- перемещения датчика), причем  - мгновенные значения, имеющие размерность длины или угла.
- мгновенные значения, имеющие размерность длины или угла.
Таким образом, ошибка слежения δ характеризует точность воспроизведения следящим электроприводом управляющего воздействия. Ошибку слежения δ можно представить как сумму ряда составляющих ошибки, количество которых зависит от режима работы электропривода.
В станках с ЧПУ и роботах рабочий орган воспроизводит три основных типа движения: позиционирование, прямолинейное с постоянной скоростью и по криволинейной траектории. Каждому из видов движений рабочего органа соответствует определенный закон перемещения объекта во времени. Несмотря на разные законы, для всех трех видов движения характерны следующие составляющие ошибки слежения, обусловленные неточностью датчика перемещения, наличием зазора в кинематической цепи между датчиком перемещения и объектом, наличием дрейфа усилительного канала и гистерезисом усилителей.
В режиме позиционирования рабочий орган должен выйти в определенную позицию, остановиться, после чего происходит очередная операция, например стол сверлильного станка с ЧПУ и деталью выходит в положение, соответствующее центру отверстия на детали, останавливается, после чего начинается сверление с движением вдоль оси сверла.
Одним из важнейших критериев качества работы в режиме позиционирования является точность выхода в заданную точку. Ошибка позиционирования  может быть охарактеризована ошибкой слежения (рис. 22, а) при отработке приводом управляющего воздействия ступенчатой формы. В этом режиме наряду с ранее перечисленными составляющими добавляется ошибка от воздействия статического момента нагрузки.
может быть охарактеризована ошибкой слежения (рис. 22, а) при отработке приводом управляющего воздействия ступенчатой формы. В этом режиме наряду с ранее перечисленными составляющими добавляется ошибка от воздействия статического момента нагрузки.
Рис. 22. Работа следящего электропривода в режимах: а - позиционирования, б - движения с постоянной скоростью, в - гармонического входного воздействия
При прямолинейном движении рабочего органа с постоянной скоростью на вход следящего привода поступает линейно нарастающий входной сигнал. При отработке этого воздействия ошибка слежения  имеет следующие дополнительные составляющие (рис. 22, б):
имеет следующие дополнительные составляющие (рис. 22, б):
- скоростную ошибку, зависящую от скорости вращения двигателя;
- нагрузочную, обусловленную наличием момента нагрузки при данной скорости.
Пусть рабочий орган совершает в плоскости движение по некоторой криволинейной траектории. Обычно УЧПУ аппроксимирует ее отрезками прямых и дугами окружностей. Движение по прямой уже рассмотрено. В случае если рабочий орган перемещается по окружности в плоскости XY с постоянной скоростью, то на входы следящих электроприводов поступают задающие гармонические сигналы:
Амплитуда входного воздействия A определяется радиусом воспроизводимой рабочим органом окружности, а ω - угловой частотой воспроизведения. Угловая частота со равна частному от деления линейной скорости движения по контуру на радиус воспроизводимой окружности.
Ошибка слежения (рис. 22, в) в режиме гармонического воздействия  на объект содержит две дополнительные составляющие, одна из которых определяется моментом нагрузки, а вторая зависит от амплитуды угловой скорости входного воздействия
на объект содержит две дополнительные составляющие, одна из которых определяется моментом нагрузки, а вторая зависит от амплитуды угловой скорости входного воздействия  (будет доказано далее).
(будет доказано далее).
Ошибки следящего электропривода, а следовательно, и его динамические свойства обусловливаются возможностями УЧПУ, параметрами приводимого в движение механизма, динамическими характеристиками регулируемого привода.
Статические и динамические параметры системы автоматического управления наиболее полно характеризуются логарифмическими амплитудно-частотными характеристиками разомкнутого привода. По форме амплитудно-частотной характеристики можно оценить ее поведение при различных видах входного воздействия. Экспериментально определить амплитудно-частотную характеристику разомкнутого привода, как правило, трудно, поэтому для оценки динамических возможностей регулируемого привода на вход замкнутой системы подаются сигналы ступенчатой и синусоидальной формы и фиксируется форма сигнала на выходе датчика скорости (тахогенератора). Так как оцениваются параметры привода в линейной системе, то амплитуда входного сигнала должна быть такой, чтобы ни один из усилителей регуляторов скорости и тока не достигал уровня насыщения. Обычно амплитуда входного сигнала не превышает 100 мВ. По реакции на единичный скачок (рис. 23) оценивается:
- быстродействие системы - время t1 между моментом подачи управляющего сигнала ступенчатой формы и первым достижением заданного значения (время первого согласования);
- время переходного процесса t2, начиная с которого ошибка не превышает заданной величины
 ;
;
- колебательность переходного процесса - число колебаний за время переходного процесса t2;
- перерегулирование
 - амплитуда наибольшего отклонения от заданной величины (обычно амплитуда первого колебания).
- амплитуда наибольшего отклонения от заданной величины (обычно амплитуда первого колебания).
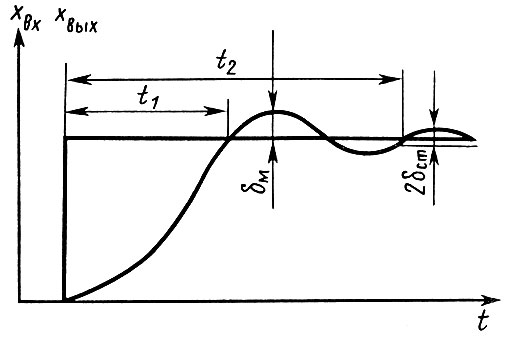
Рис. 23. Реакция привода на единичный скачок
При определении амплитудно-фазовых характеристик (АФХ) замкнутого регулируемого электропривода на его вход подается гармонический сигнал переменной частоты и постоянной амплитуды (как уже указывалось, не более 100 мВ). По гармоническому сигналу тахогенератора определяется амплитуда и сдвиг фаз выходного сигнала относительно входного. В соответствии со стандартом СЭВ под полосой пропускания регулируемого привода принято понимать наименьшую из частот гармонического сигнала, при которой либо амплитуда выходного сигнала уменьшилась в 2 раза (на 3 дБ), либо фаза выходного сигнала отстает от входного на 90° эл.
Важным параметром для оценки динамических возможностей привода является среднее ускорение, развиваемое двигателем в пусковых (тормозных) режимах. Для его определения на вход замкнутого привода подается ступенчатый сигнал большой амплитуды (соответствующий установившемуся значению скорости двигателя, равной
0,5  Ток, протекающий через двигатель, определяется не параметрами системы, а уровнем токоограничения, который может зависеть от перегрузочной способности силового преобразователя (при транзисторном приводе) или перегрузочной способности двигателя (при тиристорном приводе). Максимальное (угловое) ускорение, развиваемое двигателем, равно
Ток, протекающий через двигатель, определяется не параметрами системы, а уровнем токоограничения, который может зависеть от перегрузочной способности силового преобразователя (при транзисторном приводе) или перегрузочной способности двигателя (при тиристорном приводе). Максимальное (угловое) ускорение, развиваемое двигателем, равно  - допустимое уровнем токоограничения значение тока;
- допустимое уровнем токоограничения значение тока;  - ток статической нагрузки; J - суммарный момент инерции, приведенный к валу двигателя; c - коэффициент пропорциональности между моментом и током.
- ток статической нагрузки; J - суммарный момент инерции, приведенный к валу двигателя; c - коэффициент пропорциональности между моментом и током.
Среднее значение пускового ускорения  может быть определено экспериментальным путем при пуске привода на скорость
может быть определено экспериментальным путем при пуске привода на скорость  по кривой на выходе тахогенератора. Оно рассчитывается как отношение скорости при
по кривой на выходе тахогенератора. Оно рассчитывается как отношение скорости при  ко времени от момента подачи управляющего сигнала скачкообразной формы, соответствующего скорости , до достижения данной скорости:
ко времени от момента подачи управляющего сигнала скачкообразной формы, соответствующего скорости , до достижения данной скорости:

Рассмотренные выше динамические параметры характеризовали регулируемый привод. Для следящего привода основным параметром, определяющим его статические и динамические характеристики, является добротность по скорости  Она определяется отношением скорости v установившегося движения объекта к величине ошибки на входе
Она определяется отношением скорости v установившегося движения объекта к величине ошибки на входе 
Для определения передаточной функции следящего привода по ошибке в перечисленных трех режимах работы рассмотрим идеализированную линейную следящую систему без возмущения по нагрузке. Если пренебречь инерционностью внутреннего скоростного контура, то передаточную функцию разомкнутого контура положения  можно записать в виде
можно записать в виде  Логарифмическая амплитудно-частотная характеристика представляет собой прямую с наклоном - 20 дБ/дек, отсекающую на вертикальной оси, проходящей через
Логарифмическая амплитудно-частотная характеристика представляет собой прямую с наклоном - 20 дБ/дек, отсекающую на вертикальной оси, проходящей через  отрезок, равный
отрезок, равный  и пересекающую ось абсцисс в точке частоты среза
и пересекающую ось абсцисс в точке частоты среза 
Передаточная функция замкнутого следящего привода по ошибке при единичном входном управляющем воздействии равна:  - передаточная функция замкнутой системы.
- передаточная функция замкнутой системы.
Передаточная функция по ошибке при входном сигнале, отличном от единичного, равна произведению изображения в операторной форме входного воздействия на передаточную функцию по ошибке при единичном сигнале.
При входном сигнале скачкообразной формы уровня B

В соответствии с формулами обращения преобразований
Как следует из этого выражения, установившееся значение ошибки равно нулю, а кривая изменения ошибки во времени представляет собой экспоненту с постоянной времени 
При линейно-нарастающем по пути входном сигнале (скачок скорости V) изображение входного сигнала имеет вид:  а передаточная функция по ошибке примет вид:
а передаточная функция по ошибке примет вид:

откуда

Установившееся значение скоростной ошибки (ошибки при линейно нарастающем входном сигнале)  причем кривая имеет вид нарастающей экспоненты с той же постоянной времени, что и ранее:
причем кривая имеет вид нарастающей экспоненты с той же постоянной времени, что и ранее:
При синусоидальном входном воздействии 
изображение входного сигнала  и передаточная функция по ошибке
и передаточная функция по ошибке 
откуда

где 
Кривая  имеет две составляющие: синусоидальную и экспоненциальную с
имеет две составляющие: синусоидальную и экспоненциальную с
Установившееся значение ошибки представляет собой гармонический сигнал:

Частота входного воздействия ω может быть определена как отношение скорости обхода контура Vk к радиусу обрабатываемой окружности R. Учитывая, что при реальных режимах обработки частота входного воздействия со всегда меньше частоты среза (численно равной kv), амплитуда установившегося значения ошибки примерно равна

Как следует из всех вышеприведенных равенств, для данной структуры привода добротность kv определяет как статические, так и динамические показатели следящей системы. Приведенные вышеформулы расчета ошибки слежения для трех типов входных сигналов дают возможность выявить погрешности обработки, обусловленные следящим электроприводом подачи станка с ЧПУ. Так, для режима позиционирования характерен ступенчатый вид входного сигнала, а для режима контурной обработки - линейно нарастающий и гармонический. (Последнее справедливо в том случае, если аппроксимировать обрабатываемый контур отрезками прямых и дугами окружностей.)
Выше была рассмотрена идеализированная линейная система в предположении, что скоростной контур безынерционен. При анализе реальной системы учитывают ограниченное быстродействие скоростного контура, податливость механической передачи, наличие зазора в цепи датчика перемещения, дискретность по уровню и по времени задающего сигнала, поступающего от УЧПУ, и ряд других факторов. Тем не менее приведенные выше соотношения иногда применяются в качестве первоначального "прикидочного" расчета.
Величина добротности реальной системы выбирается в зависимости от режимов работы рабочего органа и требований, предъявляемых к следящему приводу. С точки зрения уменьшения ошибок слежения целесообразно увеличивать добротность, однако по перечисленным выше причинам привод может потерять устойчивость. В режиме позиционирования при необходимости получения монотонного процесса увеличение добротности в ряде случаев нецелесообразно.
Рассмотрим процесс пуска (торможения) следящей системы на максимальную скорость  соответствующую ускоренному ходу станка. Допустим, что время пуска регулируемого привода (при действии токоограничения) составляет 0,1 с. Следящий привод с добротностью
соответствующую ускоренному ходу станка. Допустим, что время пуска регулируемого привода (при действии токоограничения) составляет 0,1 с. Следящий привод с добротностью  при малых сигналах (движение по контуру на рабочих подачах) имеет обычно апериодическую форму переходного процесса. Будет ли монотонным процесс пуска на максимальную скорость при добротности
при малых сигналах (движение по контуру на рабочих подачах) имеет обычно апериодическую форму переходного процесса. Будет ли монотонным процесс пуска на максимальную скорость при добротности 
На рис. 24, а представлены кривые изменения скорости идеализированной линейной следящей системы  и реальной следящей системы
и реальной следящей системы  при скачкообразном изменении задающего сигнала по скорости
при скачкообразном изменении задающего сигнала по скорости  На рис. 24, б представлены кривые изменения пути во времени
На рис. 24, б представлены кривые изменения пути во времени 
 соответствующие приведенным выше кривым скорости. Кривая
соответствующие приведенным выше кривым скорости. Кривая  представляет собой экспоненту с постоянной времени
представляет собой экспоненту с постоянной времени  Установившееся значение ошибки
Установившееся значение ошибки  (рис. 24, б) пропорционально незаштрихованной площади между кривыми
(рис. 24, б) пропорционально незаштрихованной площади между кривыми  Время первого согласования переходного процесса
Время первого согласования переходного процесса  по условию равно
по условию равно 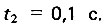 Установившиеся значения ошибки идеализированной и реальной следящих систем, имеющих одну и ту же добротность, одинаковы и равны
Установившиеся значения ошибки идеализированной и реальной следящих систем, имеющих одну и ту же добротность, одинаковы и равны  Темп разгона реальной системы вначале отстает от темпа идеализированной системы, и к моменту времени t2 ошибка слежения реальной системы превышает значение установившейся ошибки, поэтому процесс обязательно будет протекать с перерегулированием по скорости. Характерно, что заштрихованная площадь, ограниченная сверху кривой
Темп разгона реальной системы вначале отстает от темпа идеализированной системы, и к моменту времени t2 ошибка слежения реальной системы превышает значение установившейся ошибки, поэтому процесс обязательно будет протекать с перерегулированием по скорости. Характерно, что заштрихованная площадь, ограниченная сверху кривой  а снизу
а снизу  должна быть равна заштрихованной площади, ограниченной кривыми
должна быть равна заштрихованной площади, ограниченной кривыми  На кривой
На кривой  показаны характерные точки, соответствующие времени
показаны характерные точки, соответствующие времени  В первой точке угол наклона касательной равен углу наклона
В первой точке угол наклона касательной равен углу наклона  а во второй точке угол наклона максимален.
а во второй точке угол наклона максимален.
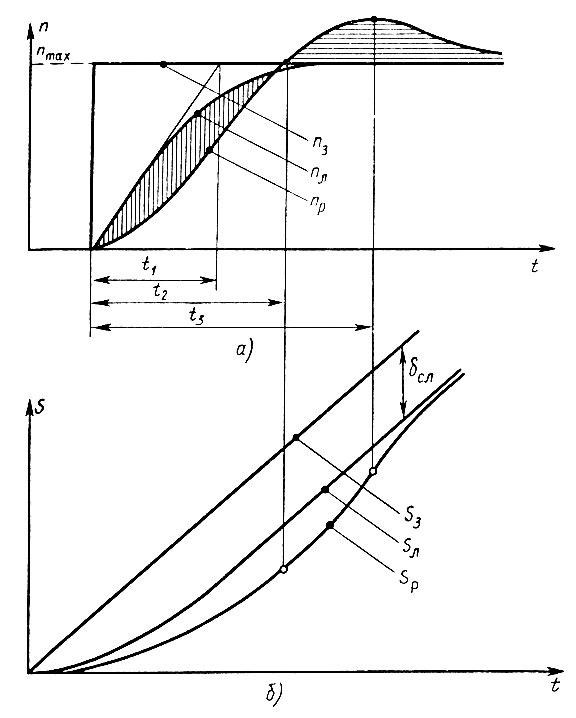
Рис. 24. Переходные процессы в следящем электроприводе: а - изменение скорости, б - изменение пути
Из всего сказанного следует, что для получения апериодического переходного процесса по скорости при малых и больших входных сигналах наиболее целесообразным было бы изменение величины добротности в зависимости от режима движения рабочего органа. Эту задачу программным путем решают современные УЧПУ.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'