8. Датчики обратной связи по перемещению (преобразователи)
Одним из наиболее важных элементов следящего электропривода для станков с ЧПУ и роботов является датчик перемещений или, как принято называть, преобразователь измерительный круговых или линейных перемещений (сокращенно ПИКП иПИЛП).
Преобразователь механических перемещений вырабатывает периодические сигналы (изменение амплитуды фазы синусоидального сигнала или числа импульсов), пропорциональные пройденному им пути. Далее эти сигналы обрабатываются, поступая в блоки предварительного усиления, формирования, интерполяции и индикации; эти блоки образуют отсчетно-измерительную систему.
В зависимости от измеряемой величины перемещения преобразователи делятся на узкопредельные и широкопредельные. Узкопредельными принято называть преобразователи, ведущие отсчет в пределах одного периода выходного сигнала, что может соответствовать перемещению от одного до нескольких миллиметров или угловых градусов. В станках с ЧПУ и роботах в основном применяют широкопредельные преобразователи, диапазон измерения которых существенно больше или просто неограничен.
В зависимости от принципа действия широкопредельные преобразователи делятся на емкостные, магнитные, индуктивные и фотоэлектрические.
Емкостные преобразователи, достаточно простые в конструктивно-технологическом исполнении, нашли ограниченное применение (в шлифовальных станках) из-за трудности преобразования выходных сигналов в стандартный ряд сигналов для систем ЧПУ. Поэтому они применяются главным образом для измерения величин порядка нескольких микрон.
Носителем информации магнитных преобразователей является магнитное поле, периодически повторяющееся с определенным шагом на образцовой мере. Для магнитных преобразователей линейных перемещений образцовой мерой может быть лента или пруток из специального состава ферромагнитных материалов. При перемещении магнитной меры информация переносится на две магнитные головки. Форма выходных сигналов синусоидальная. В конструктивном отношении магнитные преобразователи просты, но технология изготовления образцовой меры достаточно сложна. Этим объясняется их невысокая точность до ± 5 мкм/м.
Индуктивные преобразователи могут быть роторными, винтозубчатыми и индуктосинами. К роторным относятся сельсины, резольверы и вращающиеся трансформаторы; этот вид преобразователей нашел наиболее широкое применение.
В винтозубчатом преобразователе основной мерой служат зубчатая рейка, винт или специальная шестерня. Индуктивные головки, формирующие на выходе фазочувствительный высокочастотный синусоидальный сигнал, достаточно сложны по конструкции.
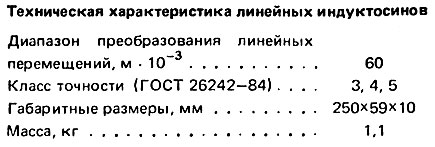
Индуктосины могут быть линейными и круговыми; по конструкции они существенно проще винтозубчатых преобразователей.
Линейный индуктосин представляет собой линейку, на одной стороне которой нанесена плоская печатная обмотка из медной фольги, изолированная от основания линейки слоем диэлектрика. Обмотка имеет вид "меандра" с постоянным шагом 2 мм. Шаг обмотки - это расстояние между серединами двух соседних поперечных проводников. Головка преобразователя представляет собой как бы часть линейки, на стороне которой, обращенной к последней, нанесены две секционированные плоские печатные обмотки из медной фольги, сдвинутые друг относительно друга на 1/4 шага и изолированные от стального основания диэлектриком. Линейные индуктосины выполняются всегда из металла (как правило, из стали).
Круговой индуктосин состоит из двух дисков (ротора и статора), один из которых вращается на валу, а другой - неподвижен. На торцевых поверхностях дисков, обращенных друг к другу, нанесены обмотки в виде "меандра" с постоянным шагом, аналогично линейному индуктосину. Диски могут быть изготовлены как из изоляционных материалов (керамика, стекло), так и из металла (сталь, алюминиевый сплав, чугун).
В зависимости от способа подачи напряжений, питающих индуктосины, выходные сигналы преобразователя могут иметь различную форму.
Если напряжение подано на головку, то периодически изменяющийся сигнал смещается по фазе относительно питающих напряжений или же сигнал изменяется по фазе на 180 при достижении положения, заданного соотношением амплитудных значений питающих напряжений.
Если напряжение подано на линейку и съем сигнала происходит с головки, то два сигнала сдвинуты друг относительно друга на 90 ° эл. и имеют функциональную зависимость при перемещении головки относительно линейки.
Пределы допускаемой погрешности  линейки при нормальной температуре в зависимости от класса точности и длины преобразуемого перемещения приведены в табл. 2, а головки - в табл. 3.
линейки при нормальной температуре в зависимости от класса точности и длины преобразуемого перемещения приведены в табл. 2, а головки - в табл. 3.
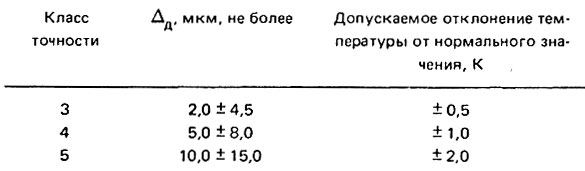
Таблица 2. Пределы допускаемой погрешности
линейки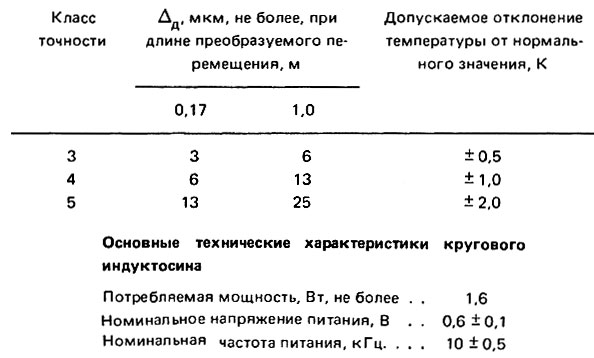
Таблица 3. Пределы допускаемой погрешности
головкиПределы допустимых погрешностей Ад при нормальном значении температуры и при допускаемом отклонении ее в зависимости от класса точности кругового индуктосина, зазоре между ротором и статором (0,20±0,05) мм приведены в табл. 4.
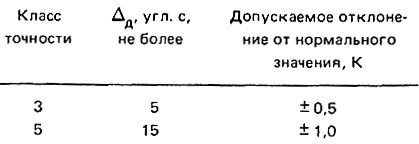
Таблица 4. Пределы допускаемых отклонений
кругового индуктосинаВращающиеся трансформаторы относятся к роторным индуктивным преобразователям. Их принцип действия такой же, как и индуктосинов. Выходное напряжение вращающегося трансформатора является функцией входного напряжения и угла поворота ротора. При этом зависимость выходного напряжения от входного линейная, а от угла поворота ротора может быть как линейной, так и синусной (косинусной). На статоре и роторе такого трансформатора, собранных из листов электротехнической стали или пермаллоя, имеются равномерно распределенные пазы, в которых размещаются, как правило, по две одинаковые взаимно перпендикулярные обмотки: одна, первичная обмотка называется обмоткой возбуждения, другая - квадратурной обмоткой, а вторичные обмотки - одна синусной, а другая косинусной. Вращающиеся трансформаторы могут быть контактными или бесконтактными.
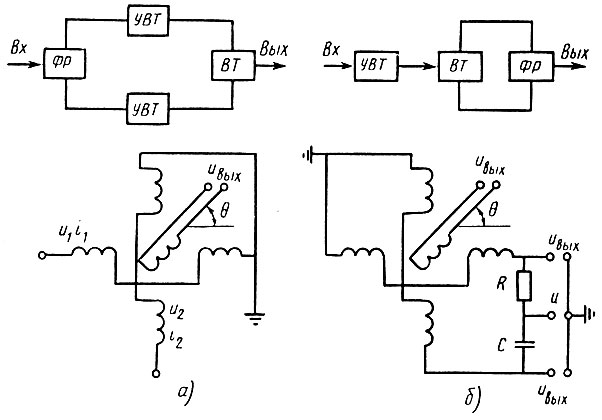
Рис. 25. Схемы включения вращающегося трансформатора: а - при двухфазном напряжении, б - при однофазном напряжении
Возможны две схемы включения вращающегося трансформатора в фазовращательном режиме. В первой схеме (рис. 25, а) на две обмотки вращающегося трансформатора подают напряжения, фазы которых сдвинуты на 90° эл.
Во второй схеме (рис. 25, б) напряжение подается на одну из обмоток, на выходе вращающегося трансформатора ставится фазорасщепитель. Каждая из схем имеет свои достоинства и недостатки. Недостаток первой схемы - необходимость двух усилителей, на выходе которых должны быть два квадратурных напряжения одинаковой амплитуды. Достоинство ее - отсутствует фазовая ошибка от вращения ротора. Вторая схема проще, но она предопределяет наличие фазовой ошибки в зависимости от частоты вращения ротора.
Выходное напряжение на обмотке ротора вращающегося трансформатора при двухфазном питании (рис. 25, а) при вращении вала с угловой скоростью Ω равно

где  - коэффициент взаимоиндукции обмоток; I - ток статорной обмотки;
- коэффициент взаимоиндукции обмоток; I - ток статорной обмотки;  - механический угол поворота роторной обмотки.
- механический угол поворота роторной обмотки.
Таким образом, фаза выходного напряжения вращающегося трансформатора, включенного по двухфазной схеме питания в фазовращательном режиме, равна механическому углу поворота роторной обмотки  относительно одной из статорных обмоток. Амплитуда синусоиды растет с увеличением скорости вращения. Частота питания обмоток
относительно одной из статорных обмоток. Амплитуда синусоиды растет с увеличением скорости вращения. Частота питания обмоток  вращающегося трансформатора выбирается таким образом, чтобы относительное изменение амплитуды от угловой скорости вращения Ω было бы невелико и не влияло на точность обработки сигнала. Так, при ускоренном входе привода подачи
вращающегося трансформатора выбирается таким образом, чтобы относительное изменение амплитуды от угловой скорости вращения Ω было бы невелико и не влияло на точность обработки сигнала. Так, при ускоренном входе привода подачи  при цене дискреты перемещения
при цене дискреты перемещения  и при числе импульсов на один оборот датчика, равном
и при числе импульсов на один оборот датчика, равном  угловая скорость Ω1 равна
угловая скорость Ω1 равна

При частоте питания обмоток датчика  можно показать, что изменение амплитуды от угловой скорости вращения ротора не будет превышать 1 %:
можно показать, что изменение амплитуды от угловой скорости вращения ротора не будет превышать 1 %:  Так как формирователь измерительной системы преобразует сигналы синусоидальной формы в прямоугольную, то такое изменение амплитуды практически погрешности не внесет.
Так как формирователь измерительной системы преобразует сигналы синусоидальной формы в прямоугольную, то такое изменение амплитуды практически погрешности не внесет.
Принцип работы вращающегося трансформатора, включенного по однофазной схеме питания и работающего в фазовращательном режиме, проиллюстрирован на рис. 25, б. Ток, протекающий по роторной обмотке, наводит в статорных обмотках эдс. Выходное напряжение на R - С цепи равно сумме эдс обмоток.
Опуская промежуточные вычисления, можно показать, что для малых значений отношения механической частоты вращения Ω к частоте  питающего напряжения
питающего напряжения  имеющих место на практике, фазовая ошибка может быть вычислена по формуле
имеющих место на практике, фазовая ошибка может быть вычислена по формуле

Амплитудная ошибка

Как следует из приведенных формул, однофазная схема питания вращающегося трансформатора принципиально вносит фазовую ошибку, величина которой прямо пропорциональна частоте вращения ротора.
В статическом режиме (Ω = 0) выражение для выходного напряжения принимает вид

т. е. электрический угол сдвига фазы  равен механическому углу поворота ротора. Таким образом, работа в этом режиме однофазного питания возможна либо в статическом режиме, либо при малых участках вращения ротора.
равен механическому углу поворота ротора. Таким образом, работа в этом режиме однофазного питания возможна либо в статическом режиме, либо при малых участках вращения ротора.
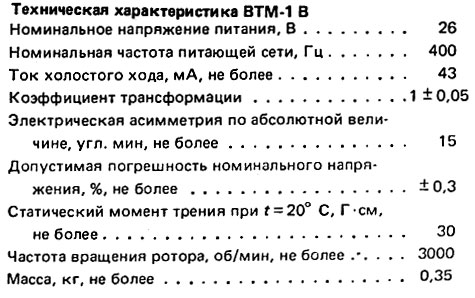
Широкое распространение в качестве датчика перемещения следящих приводов подач станков с ЧПУ нашел вращающийся трансформатор типа ВТМ-1 В.
Сельсины также конструктивно выполняются по типу синхронных или асинхронных машин (явнополюсными или неявнополюсными). Возможно одно- или трехфазное исполнение обмоток, расположенных как на статоре, так и на роторе. Сельсины могут быть контактными и бесконтактными; конструкция бесконтактных сельсинов явнополюсная с магнитным несимметричным ротором без обмотки.
Назначение сельсинов - получение системы выходных напряжений, амплитуда и фаза которых определяются угловым положением ротора (сельсины-датчики).
Рассмотрим принцип работы сельсинов.
Если на обмотку возбуждения сельсина подать напряжение переменного тока, то в фазных обмотках ротора будут наводиться эдс той же частоты, амплитуда которых будет зависеть от угла поворота ротора относительно статора, а фазы выходных напряжений будут одинаковы. Пусть ось фазы C1 отклонена от оси обмотки возбуждения на угол  (рис. 26, а и б). Эдс фазных обмоток равны:
(рис. 26, а и б). Эдс фазных обмоток равны:
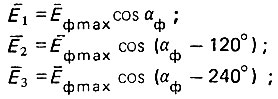
где  - максимальное значение эдс фазы. Таким образом, любому положению ротора соответствует единственное соотношение напряжений на выходных зажимах.
- максимальное значение эдс фазы. Таким образом, любому положению ротора соответствует единственное соотношение напряжений на выходных зажимах.
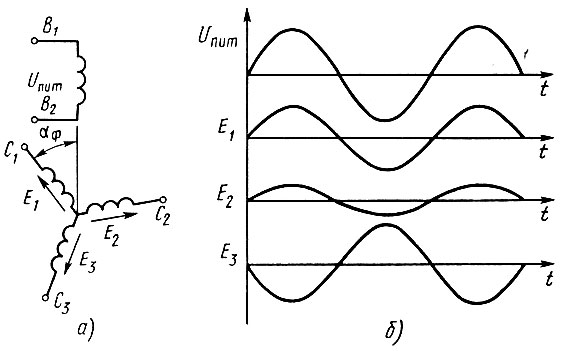
Рис. 26. Схема включения (а) и мгновенные напряжения на фазах сельсина (б)
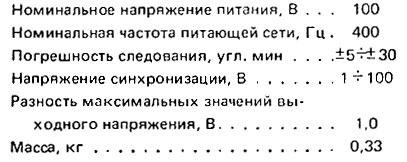
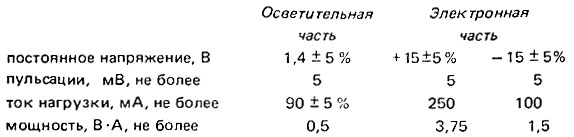
Основные параметры бесконтактного сельсина БС-155А, нашедшего наибольшее применение в станках с ЧПУ, приводятся ниже.
Фотоэлектрические преобразователи наряду с индукционными получили широкое распространение в станках с ЧПУ и роботах. Конструкция и принцип работы показан на примере преобразователя ВЕ-178 (рис. 27). Он состоит из трех частей: механической, оптической и электронной.
Механическая часть служит для точного вращения входного вала преобразователя относительно корпуса. Базовая поверхность для установки и присоединения фотоэлектрического преобразователя к станку обеспечивает соосное расположение его оптической и электронной частей. Преобразователь защищен от пыли, влаги и механического воздействия. Оптическая часть содержит светодиод 1, линзу 2, растровую индикаторную пластину 3 и растровый диск 4. Световой поток светодиода 1 проходит через линзу 2, растровую индикаторную пластину 3 и растровый диск 4. При вращении растрового диска 4 меняется интенсивность света, пропускаемого через растровое сопряжение, образуемое диском 4 и пластиной 3. В результате меняется фототок через основные фотодиоды 5 и фотодиоды 6, служащие для выработки компенсационных сигналов.
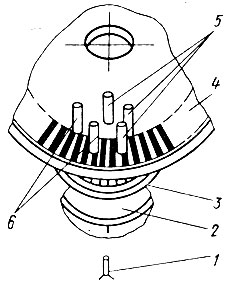
Рис. 27. Основные конструктивные элементы фотоэлектрического преобразователя
На индикаторной пластине растры расположены в два сектора и сдвинуты один относительно другого на 1/4 шага растров. Два фотодиода, установленные под каждым из этих секторов и сопрягаемых с ними растрами диска, выдают первичные сигналы  - относительное смещение подвижного и неподвижного растров. Фотодиод, расположенный в центральной части растрового диска, выдает третий сигнал начала отсчета (нулевой сигнал).
- относительное смещение подвижного и неподвижного растров. Фотодиод, расположенный в центральной части растрового диска, выдает третий сигнал начала отсчета (нулевой сигнал).
Первичные сигналы всех трех каналов поступают вначале на усилители напряжения, а затем на формирователи, преобразующие синусоидальные сигналы в прямоугольные импульсы, амплитуда и форма которых не зависят от изменения амплитуды синусоиды. После формирователей сигналы передаются на усилители мощности и инверторы. В результате на выходе образуется шесть сигналов (три основных и три инверсных). С помощью этих шести сигналов определяется начальная точка отсчета перемещения, пройденный угол и направление вращения датчика.
Наличие двух каналов датчика  обусловлено необходимостью определения направления вращения и вместе с тем это дает возможность при числе сигналов z за один оборот вала датчика формировать
обусловлено необходимостью определения направления вращения и вместе с тем это дает возможность при числе сигналов z за один оборот вала датчика формировать  импульсов в измерительной системе. Кроме того, за счет интерполяции сигналов датчика в каждом из каналов можно получить количество сигналов
импульсов в измерительной системе. Кроме того, за счет интерполяции сигналов датчика в каждом из каналов можно получить количество сигналов 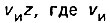 - кратность интерполяции. Так, в датчиках ROD (ФРГ) при количестве рисок 36 000 число измерительных импульсов равно 3 600 000 (тип датчика ROD-800 v = 100).
- кратность интерполяции. Так, в датчиках ROD (ФРГ) при количестве рисок 36 000 число измерительных импульсов равно 3 600 000 (тип датчика ROD-800 v = 100).
Так как учетверение (удвоение) числа импульсов и определение направления вращения характерно для любого типа импульсного датчика, то далее приводятся функциональные схемы и временные диаграммы устройств умножителей импульсов и дискриминаторов направления вращения, реализующих эти функции. На рис. 28, а представлена схема умножителя, осуществляющая учетверение импульсов, получаемых от датчика, а на рис. 28, б - временные диаграммы. Формирователи ФП1 и ФП2 преобразуют входные сигналы  в импульсы прямоугольной формы, которые после прохождения через инверторы И1 и И2 поступают на формирователи ФИ1-ФИ4, на выходе каждого из которых формируются импульсы на передних фронтах. На выходе сумматора С образуется последовательность импульсов, частота которой в 4 раза превышает исходную.
в импульсы прямоугольной формы, которые после прохождения через инверторы И1 и И2 поступают на формирователи ФИ1-ФИ4, на выходе каждого из которых формируются импульсы на передних фронтах. На выходе сумматора С образуется последовательность импульсов, частота которой в 4 раза превышает исходную.
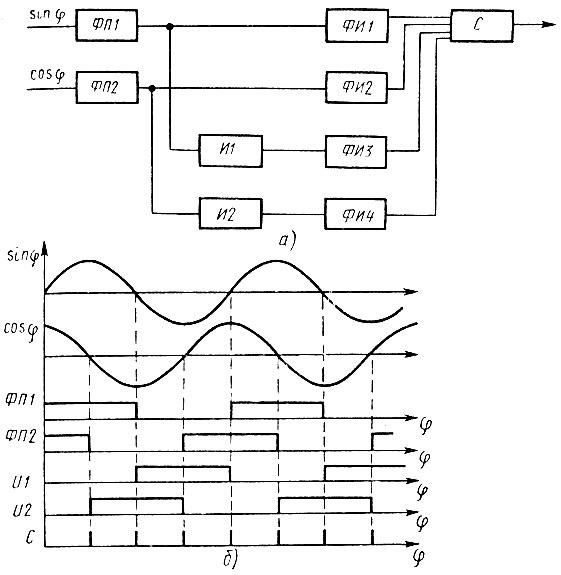
Рис. 28. Учетверение сигналов датчика: а - схема, б - временная диаграмма сигналов
На рис. 29, а представлена функциональная схема дискриминатора направления вращения. Последовательность прямоугольных импульсов И1 и И2, сдвинутых на 90° эл., поступает на входы формирователей импульсов ФИ1 (ФИ2) и на входы сумматоров С1 (С2) .
Рис. 29. Дискриминатор направления вращения: а - схема, б - временная диаграмма
При вращении датчика в сторону увеличения угла φ на выходе формирователей импульсов ФИ1 и ФИ2 образуется последовательность импульсов  а при вращении датчика в сторону уменьшения угла
а при вращении датчика в сторону уменьшения угла  Сумматоры С1 и С2, собранные по схеме "И", разрешают прохождение сигналов на выход С2 в первом случае и на С1 во втором. Временные диаграммы показаны на рис. 29, б. Ниже приведены технические характеристики фотоимпульсного датчика ВЕ-178 ввиду его широкого распространения.
Сумматоры С1 и С2, собранные по схеме "И", разрешают прохождение сигналов на выход С2 в первом случае и на С1 во втором. Временные диаграммы показаны на рис. 29, б. Ниже приведены технические характеристики фотоимпульсного датчика ВЕ-178 ввиду его широкого распространения.

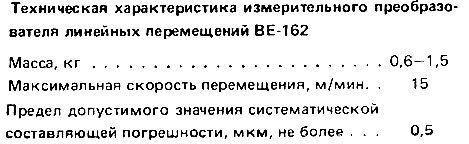
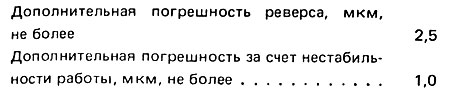
Одним из видов фотоэлектрических преобразователей являются так называемые оптические линейки. К ним относится преобразователь отечественного производства типа ВЕ-162; он предназначен для преобразования линейных перемещений рабочих органов станков в электрические сигналы, содержащие информацию о величине и направлении этих перемещений. Он состоит из трех частей: растровой линейки в корпусе с пыле- и брызгозащищенными крышками, преобразующей головки с индикаторным растром и свето- и фотодиодами предварительного усилителя сигналов.
Растровая линейка представляет собой стеклянную полоску с нанесенными на ней штрихами с шагом 20 или 40 мкм.
Преобразующая головка состоит из индикаторной решетки, четырех светодиодов, четырех осветительных линз, четырех зеркал, четырех фотодиодов, четырех собирающих линз и ряда механических деталей.
Предварительный усилитель сигналов усиливает сигналы, поступившие от приемников излучения, и осуществляет их инверсию.
Действие измерительного преобразователя линейных перемещений основано на модуляции светового потока по амплитуде при прохождении его через сопряжение двух перемещающихся друг относительно друга растров.
Оптическая схема приведена на рис. 30. Световые потоки от светодиодов 1 направляются к фотодиодам 8 через растровое сопряжение, состоящее из растровой линейки 4 и индикаторного растра 5, с помощью осветительных линз 2, зеркал 3 и 6 и собирающих линз 7. Индикаторная решетка представляет собой стеклянную пластину с нанесенными на ней четырьмя группами штрихов с шагом деления 20 или 40 мкм. Штрихи каждой группы смещены друг относительно друга на четверть периода растра. При перемещении преобразующей головки вдоль растровой линейки световой поток модулируется растровым сопряжением и, попадая на фотодиоды 8, преобразуется в электрические сигналы, изменяющиеся по закону, близкому к синусоиде. Так как штрихи четырех групп индикаторной решетки смещены друг относительно друга на четверть периода растра, то фазовый сдвиг между четырьмя формирующими угол 90° эл. Над каждой из групп штрихов установлена пара фотодиодов, сдвинутых на 1/2 шага. Так как они включены встречно, то постоянные составляющие сигналов компенсируются, а амплитуда удваивается. Четыре синусоидальных сигнала, получаемых на выходе измерительного преобразователя линейных перемещений, дают информацию как о перемещении, так и направлении движения узла станка.
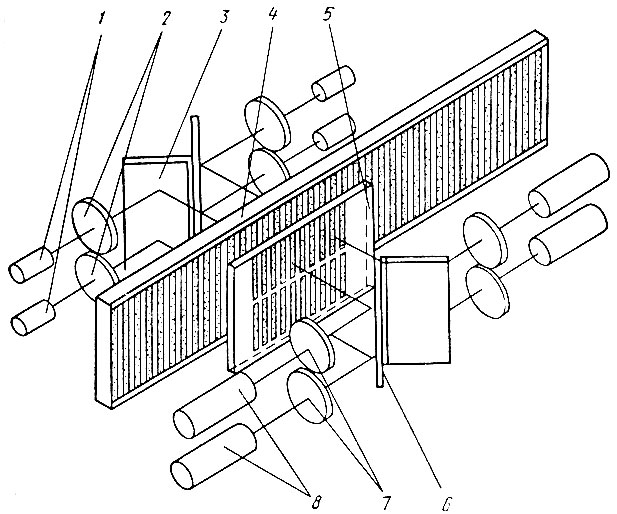
Рис. 30. Линейный растровый преобразователь перемещения синусоидами составляет
Измерительный преобразователь линейных перемещений ВЕ-162 имеет несколько модификаций в зависимости от диапазона перемещений, составляющего 250-800 мм. Габаритные размеры унифицированы по ширине и толщине 82×28 мм и изменяются лишь по длине (410 - 960 мм).
Вращающиеся трансформаторы за рубежом принято называть резольверами. В станках с ЧПУ и роботах производства СССР нашли применение некоторые типы резольверов производства стран-членов СЭВ, технические характеристики которых приведены в табл. 5.
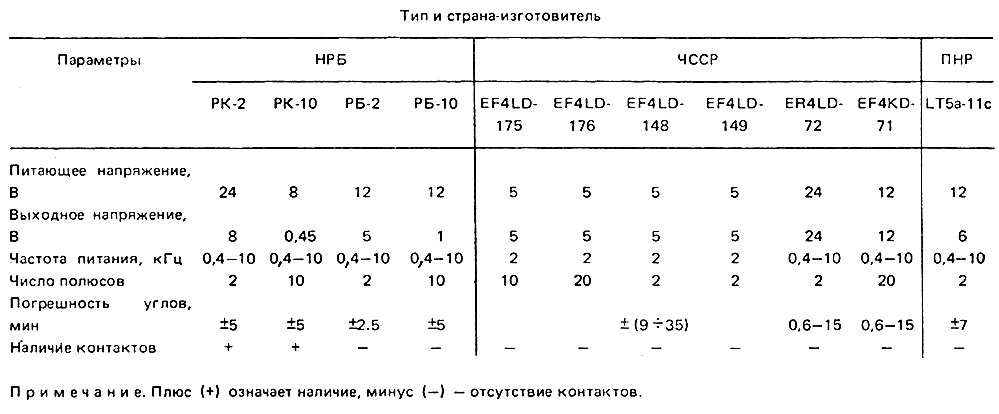
Таблица 5. Технические характеристики резольверов
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'