IV. Электропривод переменного тока и шаговый электропривод для станков с ЧПУ
9. Электропривод переменного тока с асинхронными двигателями
Асинхронные короткозамкнутые двигатели широко применяются в машиностроении. Из всех исполнительных двигателей они имеют самую простую конструкцию, очень технологичны, дешевы, ремонтнопригодны и выпускаются в больших количествах.
В течение многих лет этот двигатель считался нерегулируемым, поскольку регулировать его скорость можно только путем изменения частоты питающего напряжения.
С развитием полупроводниковой преобразовательной техники появилась возможность создания преобразователей частоты и регулируемого электропривода на их основе с очень высокими технико-экономическими показателями.
Работа асинхронного двигателя основана на принципе вращающегося магнитного поля.
Частота вращения поля зависит от частоты сети fc и числа пар полюсов p:

Если частота сети уменьшается, вращение поля, а вместе с тем и двигателя замедляется; если увеличить частоту сети, то и двигатель станет вращаться быстрее.
Частота вращения ротора двигателя (или просто двигателя) не совпадает с частотой вращения магнитного поля. Она всегда несколько меньше. Для определения частоты вращения двигателя служит такая формула:  где s - скольжение. Скольжение зависит от нагрузки на двигатель. При увеличении нагрузки скольжение также увеличивается, однако величина его в диапазоне рабочих нагрузок остается малой. При номинальном моменте скольжение составляет 0,03-0,05.
где s - скольжение. Скольжение зависит от нагрузки на двигатель. При увеличении нагрузки скольжение также увеличивается, однако величина его в диапазоне рабочих нагрузок остается малой. При номинальном моменте скольжение составляет 0,03-0,05.
Для изменения скорости асинхронного двигателя меняют частоту напряжения, питающего его статорные обмотки. В том случае, если напряжение меняется прямо пропорционально частоте (магнитный поток остается примерно постоянным), регулировочные характеристики выглядят так, как это показано на рис. 31, а. В этом случае критический момент  остается неизменным. Если напряжение не изменяется, то характеристики имеют вид, представленный на рис. 31, б. Тогда критический момент изменяется, но остается примерно постоянной мощность. Основные аналитические соотношения указанных методов регулирования приводятся ниже.
остается неизменным. Если напряжение не изменяется, то характеристики имеют вид, представленный на рис. 31, б. Тогда критический момент изменяется, но остается примерно постоянной мощность. Основные аналитические соотношения указанных методов регулирования приводятся ниже.
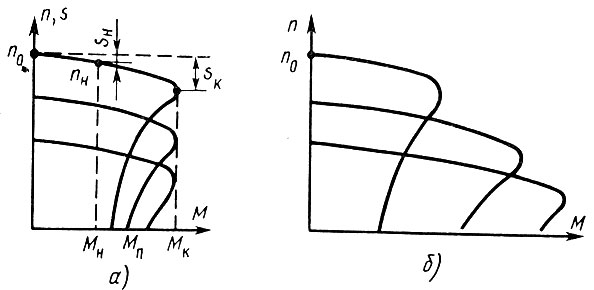
Рис. 31. Механические характеристики асинхронного двигателя: а - при регулировании с постоянным моментом, б - при регулировании с постоянной мощностью;
 - номинальные момент, скорость и скольжение соответственно,
- номинальные момент, скорость и скольжение соответственно,  - критические моменты и скольжение,
- критические моменты и скольжение,  - пусковой момент
- пусковой момент
При регулировании с постоянной перегрузочной способностью  справедливо равенство, связывающее напряжение и частоту питания:
справедливо равенство, связывающее напряжение и частоту питания:
где  - напряжение, частота питающей сети и момент двигателя в номинальном режиме;
- напряжение, частота питающей сети и момент двигателя в номинальном режиме;  - те же параметры в режиме, отличном от номинального.
- те же параметры в режиме, отличном от номинального.
Следовательно, напряжение на статоре двигателя должно изменяться не только в зависимости от частоты питающей сети (т. е. в зависимости
от желаемой частоты вращения), но и от нагрузки.
В приводе подачи регулирование скорости производится с постоянным максимально допустимым моментом нагрузки  и закон изменения напряжения упрощается:
и закон изменения напряжения упрощается:
Семейство механических характеристик при регулировании с постоянным моментом представлено на рис. 31, а.
В приводе главного движения требуется регулирование скорости с постоянной максимально допустимой мощностью. В этом случае момент изменяется обратно пропорционально частоте вращения, и тогда зависимость между частотой питающей сети и напряжением будет выражена так:
Семейство механических характеристик при регулировании с постоянной мощностью изображено на рис. 31, б.
Таким образом, законы управления двигателем переменного тока значительно сложнее, чем двигателем постоянного тока.
Преобразователи, применяемые для частотного управления асинхронным двигателем, могут строиться по различным схемам. Наибольшее распространение получил преобразователь, содержащий управляемый выпрямитель и инвертор.
В выпрямителе напряжение переменного тока питающей сети  постоянной частоты
постоянной частоты  преобразуется в напряжение постоянного тока
преобразуется в напряжение постоянного тока  величина которого может изменяться (рис. 32, а). В инверторе напряжение постоянного тока преобразуется в напряжение переменного тока требуемой частоты.
величина которого может изменяться (рис. 32, а). В инверторе напряжение постоянного тока преобразуется в напряжение переменного тока требуемой частоты.
Таким образом, в рассматриваемом случае напряжение регулируется в выпрямителе, а частота - в инверторе.
Работа регулируемого выпрямителя ничем не отличается от аналогичного в приводе постоянного тока.
Инвертор представляет собой набор полупроводниковых ключей - переключателей, которые коммутируют обмотки двигателя.
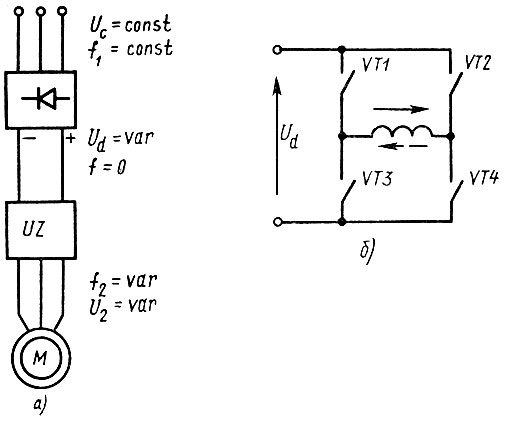
Рис. 32. Принцип частотного управления: а - схема автономного инвертора, б - схема переключения обмотки статора
Схематично принцип действия инвертора переключения обмоток статора показан на рис. 32, б. Инвертор собран по однофазной схеме; его нагрузкой является одна из трех фаз обмотки асинхронного двигателя. Направление тока в обмотке изменяется с помощью попарно работающих ключей, подсоединяющих ее к выходу выпрямителя на напряжение  При работе ключей VT1 и VT4 по обмотке протекает ток, направление которого показано сплошной линией. При работе ключей VT2 и VT3 направление тока меняется на противоположное (пунктирная линия).
При работе ключей VT1 и VT4 по обмотке протекает ток, направление которого показано сплошной линией. При работе ключей VT2 и VT3 направление тока меняется на противоположное (пунктирная линия).
При таком способе управления напряжение, прикладываемое к обмоткам статора асинхронного двигателя, имеет форму, существенно отличную от синусоиды, что приводит к повышенному нагреву двигателя и неравномерности его вращения.
Схема трехфазного автономного инвертора "складывается" из трех схем, аналогичных рис. 32, б. Для трехфазного инвертора необходимо шесть ключей. Работа ключей должна строго согласовываться во времени, чтобы напряжения на отдельных обмотках статора были сдвинуты по фазе на 120 0.
Применяют автономные инверторы напряжения и автономные инверторы тока. Они отличаются не только конструкцией, но и режимом работы.
Автономный инвертор напряжения является источником напряжения, его внутреннее сопротивление должно быть мало и при любой нагрузке его выходное напряжение должно быть постоянным. Свойства автономного инвертора тока близки к источнику тока, ток в нагрузке остается постоянным при любом ее изменении. В настоящее время автономные инверторы напряжения применяют в электроприводах с небольшим диапазоном изменения скорости, а инвенторы тока - при больших диапазонах.
Электроприводы, содержащие инвертор тока, принято называть инверторами с частотно-токовым управлением.
Большинство инверторов с частотно-токовым управлением строится на транзисторах.
Любая величина, изменяющаяся по синусоидальному закону, характеризуется амплитудой, фазой и частотой. Коль скоро она характеризуется величиной и фазой, то можно говорить о векторе. В нашем случае эти понятия применяются к ряду параметров (току двигателя, его магнитному потоку и напряжению, питающему его обмотки) инвертора и двигателя, изменяющихся в процессе регулирования скорости. Система трехфазных токов, протекающих через двигатель, после соответствующих преобразований может быть приведена к двухфазной. Один из векторов этой системы токов  совпадает по направлению с вектором потока ротора.
совпадает по направлению с вектором потока ротора.
При регулировании скорости с постоянным моментом намагничивающий ток, а следовательно, и поток ротора  остаются все время постоянными. В этом случае момент асинхронного двигателя выражается формулой
остаются все время постоянными. В этом случае момент асинхронного двигателя выражается формулой  где C - постоянная величина, зависящая от параметров двигателя. Эта формула подобна формуле момента двигателя постоянного тока, а значит, и систему управления приводом при частотно-токовом управлении можно строить так же, как и в приводе постоянного тока. На рис. 33 представлена структурная схема регулируемого электропривода с частотно-токовым управлением. Рассмотрим систему частотного управления приводом.
где C - постоянная величина, зависящая от параметров двигателя. Эта формула подобна формуле момента двигателя постоянного тока, а значит, и систему управления приводом при частотно-токовом управлении можно строить так же, как и в приводе постоянного тока. На рис. 33 представлена структурная схема регулируемого электропривода с частотно-токовым управлением. Рассмотрим систему частотного управления приводом.
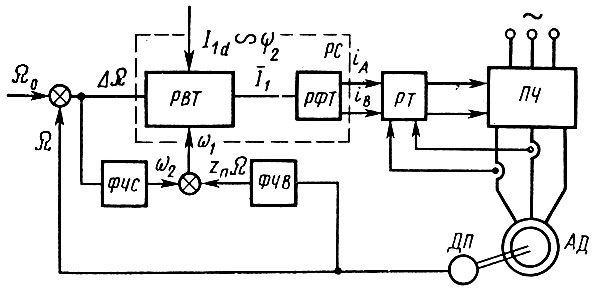
Рис. 33. Структурная схема электропривода с частотным управлением
Схема управления содержит регулятор скорости PC и регулятор тока РТ, включенные последовательно. Функция регулятора скорости такая же, как и в приводе постоянного тока,- сформировать сигнал, пропорциональный заданному значению тока. Но в отличие от привода постоянного тока, где для этого достаточно только задать модуль, в приводе переменного тока надо знать модуль, фазу и частоту, так как задается синусоидальный сигнал. Для задания модуля  необходимо знать его составляющие
необходимо знать его составляющие  Первая составляющая задается внешним устройством, вторая формируется пропорционально величине скольжения. Модуль тока определяется в соответствии с равенством
Первая составляющая задается внешним устройством, вторая формируется пропорционально величине скольжения. Модуль тока определяется в соответствии с равенством

Эти процедуры производятся в регуляторе вектора тока РВТ.
Для определения частоты тока статора  суммируют частоту скольжения ω2, равную частоте тока ротора, и частоту вращения вала двигателя
суммируют частоту скольжения ω2, равную частоте тока ротора, и частоту вращения вала двигателя  где
где  - число пар полюсов датчика ДП, формирующего этот сигнал. Частоту скольжения ω2 и частоту вращения вала определяют блоками формирования частоты скольжения ФЧС и формирования частоты вращения ФЧВ.
- число пар полюсов датчика ДП, формирующего этот сигнал. Частоту скольжения ω2 и частоту вращения вала определяют блоками формирования частоты скольжения ФЧС и формирования частоты вращения ФЧВ.
Таким образом, на выходе регулятора вектора тока заданы вектор тока I1 и его частота ω1.
В регуляторе фазных токов РФТ происходит преобразование токов двухфазной системы в токи  трехфазной системы (третий ток получается как разность первых двух).
трехфазной системы (третий ток получается как разность первых двух).
В регуляторе тока РТ заданные токи сравниваются с истинными (по сигналам, получаемым от датчиков тока, установленных в двух фазах); их разность после соответствующих преобразований поступает в преобразователь частоты ПЧ в виде управляющего сигнала.
В соответствии с этим сигналом силовая часть транзисторного преобразователя (на рис. 33 не показан) частоты, работа которого основана на принципе широтно-импульсной модуляции, формирует токи синусоидальной формы требуемой частоты в обмотках асинхронного двигателя. Такой алгоритм управления дает возможность создать регулируемый электропривод с асинхронным двигателем, имеющим высокие статические и динамические характеристики.
Серийно выпускаемое комплектное устройство типа "Размер" состоит из нескольких электроприводов с частотно-токовым управлением, которые устанавливаются в механизмы подач и главного движения. Приводы подач изготовляются на номинальные моменты 7-70 Нм, максимальную частоту вращения 1500 об/мин и имеют диапазон регулирования 10 000; приводы главного движения имеют максимальную мощность 18 кВт и максимальную частоту вращения 4500 об/мин. Полоса пропускания привода составляет 100 Гц.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'