10. Электропривод с вентильным двигателем
В механизмах подач станков с ЧПУ и в роботах в последнее время получил широкое распространение привод с вентильным электродвигателем, обладающий рядом технико-экономических, показателей, превосходящих аналогичные для других систем привода.
Вентильным называется двигатель, в котором коммутация секций (фаз) обмотки статора осуществляется с помощью полупроводникового коммутатора, управляемого сигналами датчика положения ротора.
Датчик положения ротора служит для позиционной обратной связи в зависимости от положения магнитной оси ротора по отношению к эквивалентной магнитной оси статора. Коммутатор вместе с датчиком положения ротора выполняет те же функции, что и коллектор в двигателе постоянного тока.
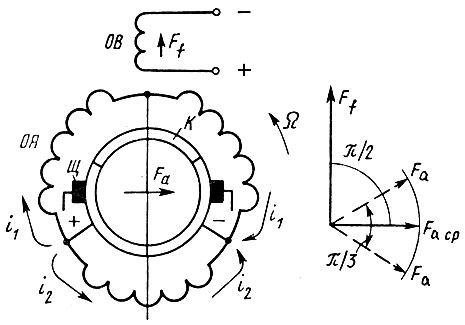
Рис. 34. Принцип действия двигателя постоянного тока: ОВ - обмотка возбуждения, ОЯ - обмотка якоря, К - коллектор, Щ - щетка,
 - намагничивающие силы статора и ротора соответственно
- намагничивающие силы статора и ротора соответственно
Рассмотрим работу двигателя постоянного тока, так как его принцип действия аналогичен вентильному двигателю. Двигатель постоянного тока (рис. 34) имеет неподвижную систему возбуждения и щетки, скользящие по коллектору вращающегося якоря. Щеточно-коллекторный узел двигателя постоянного тока служит для позиционной связи ротора и статора таким образом, чтобы угол между намагничивающей силой статора  и ротора
и ротора  был равен 90° эл. Тем самым достигается максимальный вращающий момент, развиваемый двигателем при данном потоке возбуждения и токе якоря, и устойчивая работа двигателя при изменении питающего напряжения, момента нагрузки и других возмущениях. Приближенно можно принять, что момент, развиваемый двигателем, равен
был равен 90° эл. Тем самым достигается максимальный вращающий момент, развиваемый двигателем при данном потоке возбуждения и токе якоря, и устойчивая работа двигателя при изменении питающего напряжения, момента нагрузки и других возмущениях. Приближенно можно принять, что момент, развиваемый двигателем, равен  - поток возбуждения обмотки статора, - поток, образуемый токами обмотки ротора.
- поток возбуждения обмотки статора, - поток, образуемый токами обмотки ротора.
Выше был рассмотрен двигатель постоянного тока с большим количеством секций, у которого угол v между намагничивающей силой статора и ротора , как указывалось, равен 90° эл. Вентильный двигатель ближе к двигателю постоянного тока, у которого малое число секций (угол v отличен от 90° эл. и может изменяться в зависимости от числа секций). У трех-секционного двигателя постоянного тока, модель которого представлена на рис. 34, вектор намагничивающей силы якоря колеблется относительно среднего положения  на угол
на угол 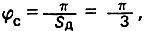 где S3 - число секций двигателя.
где S3 - число секций двигателя.
В элементарном двигателе, представляющем собой рамку с током в магнитном поле, возможны четыре варианта взаимного расположения магнитных осей рамки и поля (угол v) :
Если вентильный двигатель представить в виде упрощенной модели, содержащей неподвижную обмотку статора в виде одного витка и ротор, собранный из постоянных магнитов, то для этого двигателя характерны те же четыре варианта взаимного расположения магнитных осей ротора и статора.
Рис. 35. Принцип действия вентильного электродвигателя: а - переключение обмоток в четырех точках положения ротора.
Вал двигателя соединен с валом датчика положения ротора; датчик состоит из двух неподвижных чувствительных элементов ЧЭ1 и ЧЭ2 и сектора, вращающегося на валу и имеющего угол 180° эл. В зависимости от взаимного расположения чувствительных элементов и сектора включаются пары транзисторов VT1-VT1' и VT2-VT2' мостового коммутатора, питающего статорную обмотку (рис. 35, а). В положение I по команде ЧЭ1 включены транзисторы VT1-VT1' и ток протекает в направлении, показанном на рисунке. Так как v = 90°эл., то эдсе и вращающий момент M максимальны. В положении II транзисторы VT1-VT1' отключаются и включаются транзисторы VT2-VT2', ток меняет свое направление на противоположное,  В положении III
В положении III  и
и  направление вращающего момента осталось тем же, что и в положении ротора I, так как изменилось направление тока, так как включены транзисторы VT2-VT2'. И наконец, в положении IV v = 360° эл., M = 0 и e = 0. На рис. 35, б приведены временные диаграммы вращающего момента M, противо-эдс e и тока I в предположении, что индукция по окружности изменяется синусоидально.
направление вращающего момента осталось тем же, что и в положении ротора I, так как изменилось направление тока, так как включены транзисторы VT2-VT2'. И наконец, в положении IV v = 360° эл., M = 0 и e = 0. На рис. 35, б приведены временные диаграммы вращающего момента M, противо-эдс e и тока I в предположении, что индукция по окружности изменяется синусоидально.
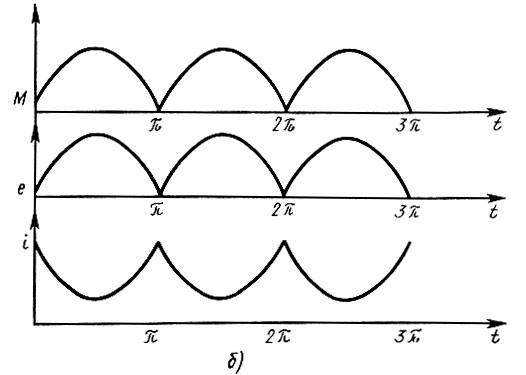
Рис. 35. Принцип действия вентильного электродвигателя: б - временные диаграммы
Анализ этих кривых приводит к следующим выводам:
- кривая момента имеет точки M = 0 и носит пульсирующий характер; это может исключить возможность запуска под нагрузкой и приведет к неравномерности вращения;
- кривая противо-эдс носит пульсирующий характер, что ухудшает энергетику;
- кривая тока имеет пульсации, причем максимум тока равен пусковому.
Для уменьшения пульсаций момента число секций надо увеличить. Работу двухсекционного двигателя с двухмостовым коммутатором можно рассматривать как работу двух двигателей на один вал (рис. 36, а). Датчик положения ротора имеет две пары чувствительных элементов ЧЭ1-ЧЭ2 и ЧЭ3-ЧЭ4, которые коммутируют транзисторные пары VT1-VT1', VT2-VT2' и VT3-VT3', VT4-VT4'. Отметим, что угол сектора (угол проводимости каждой пары) равен 180° эл. На осциллограммах (рис. 36, б) представлены зависимости моментов и токов в каждой из секций от угла поворота ротора (индекс I - в первой, II - во второй) и суммарного момента на валу двигателя  Как следует из рассмотрения кривых, пульсации момента существенно уменьшились, а пульсации тока (эдс) остались неизменными.
Как следует из рассмотрения кривых, пульсации момента существенно уменьшились, а пульсации тока (эдс) остались неизменными.
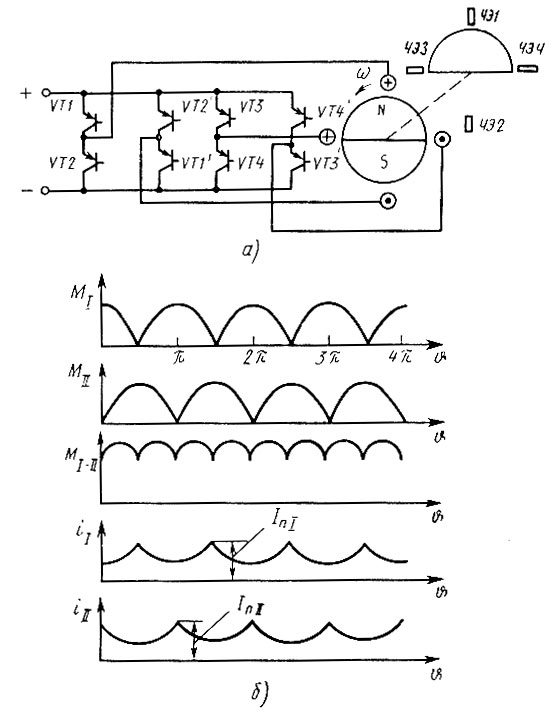
Рис. 36. Двухсекционный вентильный двигатель с двухмостовым коммутатором: а - схема, б - осциллограммы
В отечественной литературе вентильные двигатели называют синхронными двигателями с постоянными магнитами на роторе и полупроводниковым коммутатором или бесконтактными двигателями постоянного тока.
Конструктивно вентильный двигатель напоминает синхронную машину. В статор, набранный из листового железа, уложена трехфазная обмотка с числом полюсов обычно 2p = 6 или 2p = 8. На роторе двигателя крепятся постоянные магниты. Двигатель имеет датчик положения ротора и тахогенератор (контактный или бесконтактный). Кроме того, двигатель может иметь встроенный тормоз и датчик перемещения. На рис. 37 представлен разрез двигателя. Назначение датчика положения ротора, тахогенератора и тормоза такое же, как и в двигателях постоянного тока.
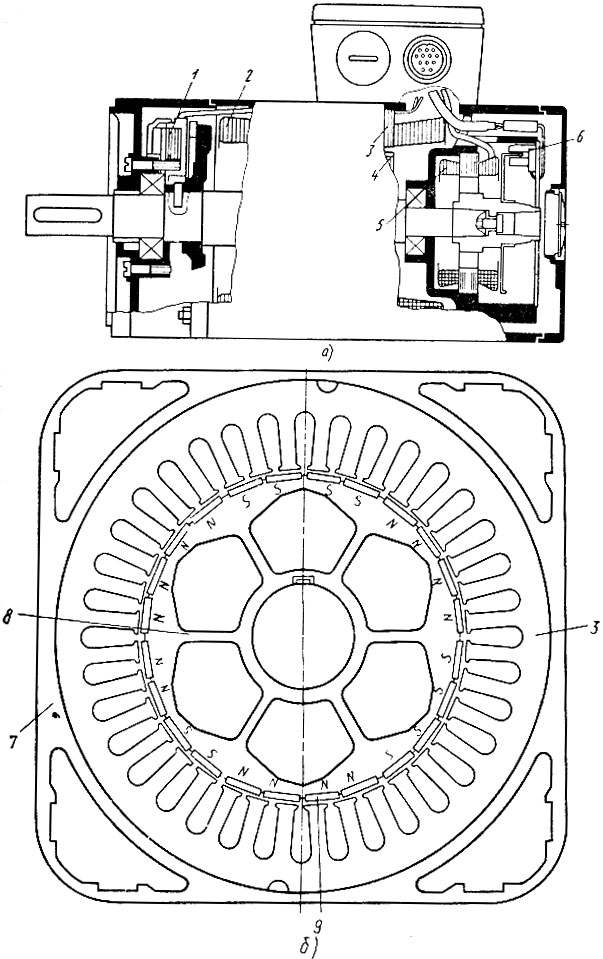
Рис. 37. Вентильный двигатель: а - продольный разрез, б - поперечный разрез; 1 - тормоз, 2 - обмотка статора, 3 - пакет статора, 4 - ротор, 5 - тахогенератор, 6 - ДПР, 7 - корпус двигателя, 8 - пакет ротора, 9- магниты ротора
Статор вентильного двигателя конструктивно ничем не отличается от статора машины переменного тока. Однако выбор схемы обмотки имеет принципиальное отличие. Чтобы получить равномерное вращение ротора в асинхронном двигателе, обмотку укладывают таким образом, чтобы кривая индуктированного напряжения имела синусоидальную форму по расточке статора. В вентильном двигателе кривая индуктированного напряжения имеет трапецеидальную форму, длительность горизонтальной части которой составляет 120° эл.
На сердечнике ротора вентильного двигателя, набранном из листовой стали, крепятся пластины из магнитного материала. В настоящее время наибольшее распространение получили два типа магнитов: самарий-кобальтовые, или редкоземельные, и ферритовые.
Лучшими характеристиками обладают магниты из редкоземельных материалов; их магнитная индукция и коэрцитивная сила значительно выше ферритовых магнитов. Если ротор вентильного двигателя выполнен из редкоземельных магнитов, обладающих более высокой удельной энергией, то он имеет меньший диаметр (по сравнению с ферритами); это значительно снижает момент инерции.
В настоящее время как в СССР, так и за рубежом ведутся работы по созданию магнитов типа неодим - железо-бор, характеристики которых сравнимы с характеристиками редкоземельных магнитов, но стоимость их существенно меньше.
По сравнению с двигателем постоянного тока вентильный двигатель имеет следующие достоинства:
высокую надежность, независимость максимального момента от скорости, меньший момент инерции, более широкий диапазон регулирования за счет повышенной максимальной частоты вращения, лучшие массогабаритные показатели, хороший отвод тепла (так как обмотка расположена на статоре), более высокий кпд и меньший уровень шума из-за отсутствия щеток, нечувствительность к окружающей среде, возможность выполнения обмотки на высокое напряжение, что позволяет уменьшить габаритные размеры преобразователя.
К недостаткам вентильного двигателя следует отнести его более высокую стоимость.
По сравнению с асинхронным двигателем, питаемым от преобразователя частоты, достоинства вентильных двигателей следующие: лучший кпд ввиду отсутствия потерь на скольжение, малый момент инерции ротора вследствие того, что потери в нем отсутствуют и линейные скорости, выбранные из условий охлаждения, могут быть меньше; большее быстродействие и лучшая управляемость, так как вентильный двигатель представляет собой инерционное звено первого порядка, а асинхронный - второго.
Недостаток вентильных двигателей - невозможность регулирования потока возбуждения (режим работы с постоянной мощностью). Но это важно только в приводах главного движения станков.
По сравнению с синхронным двигателем, питающимся от преобразователя частоты, преимущества вентильного двигателя таковы:
- нет явления "опрокидывания" при росте нагрузки;
- нет изменения угла нагрузки при изменении момента ("качания" машины).
Перечисленные преимущества вентильных двигателей по сравнению с другими типами двигателей предопределили широкую область применения их в механизмах подач станков с ЧПУ и в роботах.
Не останавливаясь подробно на узлах вентильного двигателя, общих с двигателем постоянного тока, рассмотрим принцип действия датчика положения ротора и бесконтактного тахогенератора.
Датчик положения ротора служит для определения взаимного углового положения ротора и статора и выдачи команд для управления схемой коммутации обмоток. Датчики могут быть дискретного или аналогового типа. Датчики дискретного типа выдают сигналы постоянной амплитуды, длительность которых определяется угловым размером сектора якоря. Аналоговый датчик выдает непрерывный сигнал обычно с периодом 2π град.
Распространение получили датчики дискретного типа, к которым относятся гальваномагнитные, индукционные и оптические.
Датчики индукционного типа сравнительно просты и дешевы, надежны и малогабаритны, но конструктивно они сложнее оптических. Наиболее широко применяются оптические датчики. Они имеют сравнительно простую конструкцию якоря в виде диска с прорезями, что предопределяет их надежность в эксплуатации.
Гальваномагнитные датчики (датчики Холла, магнитодиоды и магниторезисторы) вырабатывают сигналы малого уровня и с малой крутизной фронта. Кроме того, встройка таких датчиков в двигатель затруднена. По этим причинам эти датчики нашли ограниченное применение. Оптические датчики конструктивно могут быть совмещены с датчиком перемещения; для этого на диск наносят сектора для датчика положения и риски для датчика перемещения. Не останавливаясь подробно на конструкции оптического датчика (она аналогична рассмотренному ранее ВЕ-178), рассмотрим принцип формирования сигналов управления. Пусть алгоритм управления двигателя таков, что ток одновременно протекает только через две его фазы (угол проводимости равен 120° эл.).
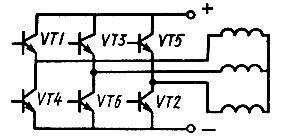
Рис. 38. Силовая часть вентильного привода
Для нормального функционирования силовой части привода, представленной на рис. 38, необходимо на транзисторы VT1-VT6 подавать сигналы, длительность которых определяется частотой вращения вала двигателя, но всегда составляет 120° эл.
Последовательность включения определяется направлением вращения. На рис. 39, а представлен вид диска и чувствительных элементов ЧЭ1, ЧЭ2 и ЧЭ3 датчика положения ротока для шестиполюсного вентильного двигателя.
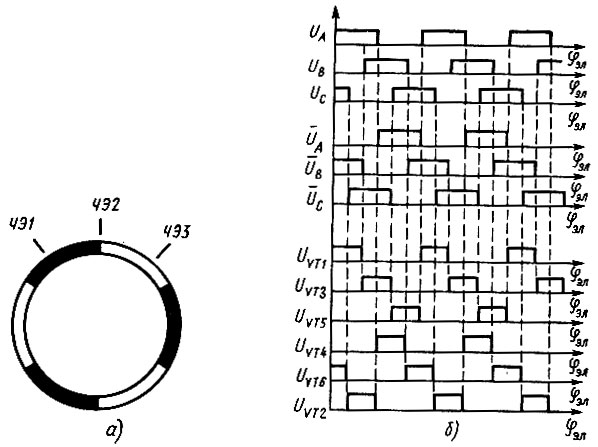
Рис. 39. Принцип формирования сигналов управления вентильным двигателем: а - вид диска и чувствительных элементов датчика положения ротора, б - диаграммы сигналов управления
Чувствительные элементы смещены друг относительно друга на 120° эл. Сегменты диска имеют угол 180° эл. При вращении диска, укрепленного на валу датчика перемещения, по трем каналам формируются основные сигналы 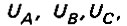 имеющие скважность, равную двум, и сдвинутые по фазе друг относительно друга на 120° эл. После ряда преобразований формируются сигналы управления транзисторами VT1-VT6.
имеющие скважность, равную двум, и сдвинутые по фазе друг относительно друга на 120° эл. После ряда преобразований формируются сигналы управления транзисторами VT1-VT6.
На рис. 39, б представлены диаграмму основных  и инверсных сигналов
и инверсных сигналов  поступающих с датчика положения ротора, а также сигналов UVT1-UVT6, управляющих транзисторами VT1-VT6 в соответствии с логическими функциями:
поступающих с датчика положения ротора, а также сигналов UVT1-UVT6, управляющих транзисторами VT1-VT6 в соответствии с логическими функциями:

Как следует их осциллограмм, сигналы управления группой транзисторов VT1, VT3 и VT5 (VT4, VT6 и VT2) сдвинуты друг относительно друга на 120°эл., угол проводимости каждого транзистора - 120° эл., а сдвиг фаз между управляющими сигналами двух транзисторов в одном плече - 180° эл. (VT1 и VT4; VT3 и VT6; VT5 и VT2).
Следует отметить, что представленный способ формирования сигналов управления транзисторами не является единственным. Существуют конструкции датчиков положения ротора, в которых сдвиг фаз между 431, 432 и 433 составляет 60° эл. Датчик подобной конструкции при необходимости позволяет распознавать направление вращения. Подобные датчики иногда коммутируют обмотки не только двигателя, но и бесконтактного тахогенератора, построенного по принципу вентильной машины.
Иногда в качестве датчиков положения ротора используются резольверы, в которых совмещаются функции датчика перемещения.
В этом случае статор резольвера жестко ориентируется относительно магнитных осей статора вентильного двигателя.
Наряду с датчиком положения ротора электропривод с вентильным двигателем имеет еще один специфический элемент - бесконтактный тахогенератор. Его появление обусловлено стремлением увеличить надежность привода, исключив подвижный контакт (коллектор) не только в двигателе, но и в тахогенераторе. По своим техническим характеристикам он не уступает тахогенератору постоянного тока, ранее применяемому в широкорегулируемом электроприводе.
Ранее известные бесконтактные тахогенераторы не применялись в широко регулируемых электроприводах из-за ряда их недостатков.
Асинхронные тахогенераторы, обладая высокой линейностью выходной характеристики, имеют сравнительно малую крутизну выходного напряжения (не выше 10 В/1000 об/мин) и остаточное напряжение 50 мВ. Последнее обстоятельство не позволяет применить их в приводе с диапазоном регулирования частоты вращения даже менее 100 (полезный сигнал 100 мВ). Синхронные тахогенераторы конструктивно просты, не имеют остаточного напряжения и зоны нечувствительности. Однако частота выходного напряжения пропорциональна скорости вращения (для двухполюсной машины при n = 0,1 об/мин, f = 0,017 Гц) . Сглаживание сигналов таких сверхнизких частот для получения напряжения постоянного тока вносит запаздывание сигнала по времени, в результате этого построить систему привода с приемлемыми динамическими качествами не представляется возможным. Применение же специальных фазочувствительных схем обработки сигнала, сохраняющих все преимущества синхронных тахогенераторов и не вносящих запаздывания, чрезвычайно сложны, так как приходится устанавливать на вал генератора дополнительные измерительные устройства.
Бесконтактный тахогенератор, использующий принцип вентильного двигателя, не имеет отмеченных выше недостатков. Он позволяет получить высокие статические и динамические характеристики широкорегулируемого электропривода.
Бесконтактный тахогенератор, созданный по принципу вентильного двигателя, имеет те же основные элементы, что и двигатель. Специфические требования, предъявляемые к выходным характеристикам тахогенератора, привели к ряду изменений его конструкции по сравнению с двигателем. Тахогенераторы обычно имеют два полюса, в то время как число полюсов у двигателя равно 
Воздушный зазор между ротором и статором у тахогенератора увеличен по сравнению с двигателем, что позволяет устранить зубцовые пульсации в кривой выходного напряжения тахогенератора. Так как через обмотку тахогенератора протекают малые токи, не приводящие к размагничиванию системы возбуждения, то в последней использованы сравнительно дешевые магниты "альнико". Они более стабильны и имеют более высокую индукцию и меньшую коэрцитивную силу, чем редкоземельные магниты, устанавливаемые в вентильных двигателях.
Выше был рассмотрен принцип работы вентильного электродвигателя при неизменной частоте вращения его вала. Ее регулирование осуществляется изменением напряжения, подводимого к обмоткам статора (аналогично двигателю постоянного тока).
Силовой преобразователь, питающий вентильный двигатель в электроприводе, должен выполнять две функции: коммутатора, переключающего обмотки и поддерживающего требуемое направление вращающего момента, и регулятора напряжения, изменяющего частоту вращения двигателя.
Регулируемый электропривод подачи содержит вентильный электродвигатель и широтно-импульсный транзисторный преобразователь, включающий два блока - выпрямитель и инвертор.
Силовая часть выпрямителя (рис. 40, а) состоит из согласующего трансформатора ТС, диодов VD7-VD12, блока конденсаторов К, разрядного транзистора VT7 и балластного сопротивления Rб, транзисторного инвертора, построенного на силовых транзисторных ключах, VT1-VT6 и обратных диодах VD1-VD6. К выходу инвертора подключен вентильный двигатель ВД, на валу которого установлены датчик положения ротора ДПР и тахогенератор ТГ. В фазах вентильного двигателя установлены измеритель тока ИТ. Трансформатор ТС предназначен для согласования напряжения сети с номинальным напряжением вентильного двигателя.
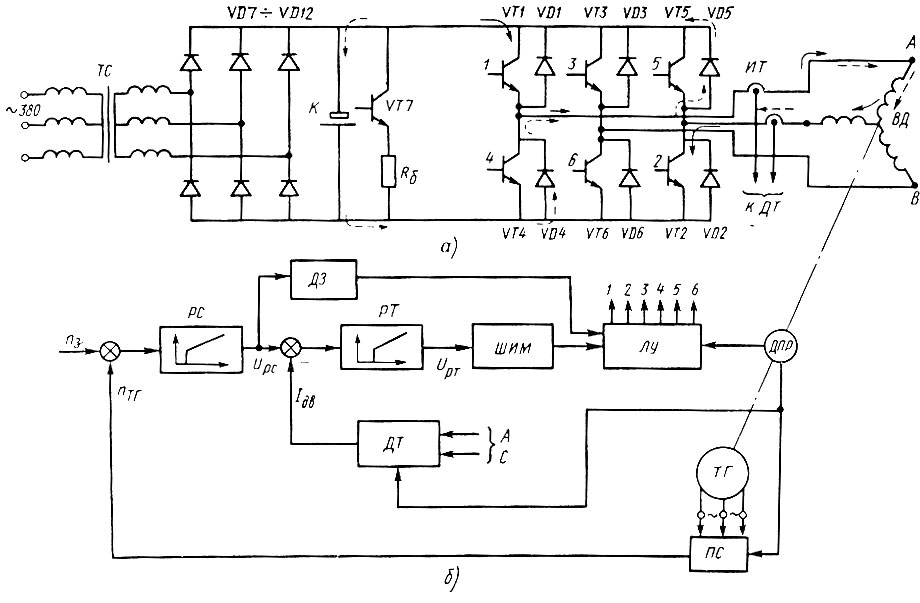
Рис. 40. Привод подачи с вентильным двигателем: а - силовая часть, б - управляющая часть
Диоды VD7-VD12 образуют выпрямительный мост. Конденсаторный блок К представляет собой сглаживающий фильтр и накопитель энергии (о чем будет сказано ниже).
Разрядный транзистор VT7 и балластное сопротивление Rб служат для преобразования энергии, запасенной в конденсаторном блоке K, в тепловую. В режиме, когда электромагнитная энергия, запасенная в двигателе, передается в конденсаторный блок K, на последнем возрастает напряжение. При достижении некоторого предела включается разрядный транзистор VT7, разряжая конденсаторный блок K на балластное сопротивление Rб, препятствуя тем самым дальнейшему росту напряжения.
Транзисторный инвертор играет двойную роль. Во-первых, по команде, поступающей от датчика положения ротора, подключает ту или иную фазу двигателя к источнику питания (при включении транзисторов VT1 и VT2 подключены фазы А и С, направление тока в двигателе показано сплошной линией) . Во-вторых, с помощью широтно-импульсного модулятора на двигателе изменяется напряжение, и таким образом поддерживается заданная его частота вращения.
Режим работы управления транзисторов при широтно-импульсном модуляторе может быть симметричным и несимметричным. При симметричном управлении через обмотки двигателя (фазы A и C в данном случае) протекает знакопеременный ток, так как попарно включаются транзисторы VT1-VT2 и VT4-VT5. Одним из вариантов несимметричного режима переключения является случай, при котором транзистор VT2 постоянно включен, а изменение подводимого к двигателю напряжения производится переключением транзистора VT1. При этом через двигатель протекает знакопостоянный ток. Однако в обоих случаях существует режим, при котором выключаются все транзисторы. При этом за счет электромагнитной энергии, запасенной в двигателе, ток протекает через фазы A и C в том же направлении, что и до отключения транзистора, замыкаясь по цепи VD5-K-VD4 и заряжая конденсаторный блок K (направление протекания тока показано пунктиром). Энергия передается в конденсаторный блок, и двигатель тормозится.
При длительном процессе торможения (большие маховые массы нагрузки) напряжение на конденсаторе может превзойти допустимый предел и вывести из строя транзисторы VT1-VT6. Для предотвращения этого предусмотрены транзистор VT7 и балластное сопротивление Rб, назначение которых рассматривалось ранее.
Управляющая часть привода (рис. 40, б) состоит из регулятора скорости PC, датчика тока ДТ, регулятора тока РТ, широтно-импульсного модулятора ШИМ, логического устройства ЛУ, преобразователя сигнала ПС, дискриминатора знака ДЗ.
Регулирование скорости происходит следующим образом.
Сигнал задания скорости nЗ алгебраически суммируется с сигналом истинной скорости nТГ. Последний формируется в преобразователе сигнала ПС из напряжений бесконтактного тахогенератора ТГ с помощью датчика положения ротора ДПР (подробно разбиралось ранее). Сигналы nЗ и nТС, суммируясь, поступают на вход регулятора скорости РС, обычно выполняемый в виде ПИ-регулятора. Так же, как и в приводах подач постоянного тока с подчиненным регулированием, выходное напряжение (Uрс регулятора скорости РС представляет собой входной сигнал для регулятора тока РТ, определяющий заданное значение тока (момента) по величине и по знаку. В зависимости от знака UРС дискриминатор знака ДЗ дает команду логическому устройству ЛУ на включение той или иной пары транзисторов при неизменном положении ротора (например, вместо VT1-VT2 включаются VT4-VT5). В результате ток, протекая по тем же фазам двигателя A и C, меняет свое направление на противоположное. Таким образом, знак сигнала UРС определяет направление вращения. На вход датчика тока ДТ поступают двуполярные сигналы, пропорциональные величине токов в фазах A и C. Зная токи в фазах A и C, путем суммирования получают ток в фазе B. Так как угол проводимости тока в каждой фазе составляет 240° эл. (имеются две паузы по 60° эл.), то для получения гладкой кривой на выходе ДТ, соответствующей постоянному вращающему моменту двигателя, по командам с ДПР суммируются соответствующие однополярные сигналы токов всех трех фаз: A, B и C (либо только положительные полуволны, либо отрицательные). Сумма заданного тока UРС и истинного тока двигателя IДВ поступает на вход регулятора тока РТ, в данном случае выполненный в виде ПИ-регулятора. Сигнал на выходе регулятора тока (UРТ), суммируясь в широтно-импульсном модуляторе ШИМ с пилообразным сигналом (постоянной) частоты 1-15 кГц, образует на его выходе прямоугольные широтно-модулированные импульсы, скважность которых определяется величиной сигнала UРТ. Таким образом, 6/рт определяет уровень напряжения, подаваемого на фазы вентильного двигателя. Логическое устройство ЛУ по сигналам, поступающим от дискриминатора знака ДЗ, датчика положения ДП и широтно-импульсного модулятора ШИМ, формирует импульсы управления, поступающие на базы 1-6 транзисторных силовых ключей VT1-VT6.
Обычно подобные электроприводы содержат ряд устройств защиты: от повышения или понижения напряжения постоянного тока в силовой цепи; от понижения напряжения питания цепей управления; от перегрева двигателя; от перегрева транзисторных блоков; от неправильной коммутации фаз двигателя и тахогенератора; от несоответствия истинной скорости заданной.
Иногда в состав привода входит блок диагностики и индикации, в котором с помощью светодиодов определяются места основных видов отказов, а более подробная информация о работоспособности отдельных блоков выводится через интерфейсные устройства в ЭВМ.
Привод подачи с вентильным двигателем может иметь различные силовые схемы и алгоритмы управления. Так, силовая схема может быть бестрансформаторной, форма токов в фазах двигателя может быть синусоидальной, а не прямоугольной, системы управления могут быть с подчиненным регулированием и с релейным регулятором тока. Известны электроприводы с релейными регуляторами, работающими в режиме скольжения и т. д.
Серийно выпускаемый комплектный электропривод с вентильным двигателем отечественного производства типа ЭПБ-1 предназначен для применения в механизмах подачи станков с ЧПУ и роботов. Комплект включает блок питания, блоки регулирования (до трех) и двигатели с тахогенератором, тормозом, терморезистором, датчиком положения ротора и датчиком перемещения. В приводе применяется двигатель серии 4С×2П.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'