11. Электроприводы подачи с шаговыми двигателями
До недавнего времени шаговый привод широко применялся в механизмах подачи станков с ЧПУ и роботах. Это объяснялось минимальными массогабаритными параметрами и простотой системы управления по сравнению с другими видами приводов.
Усложнение алгоритмов управления приводом и возросшие требования к его точности привели к вытеснению шагового электропривода электроприводом с двигателями постоянного и переменного тока. Тем не менее в ряде случаев, когда габаритные размеры станка малы и требования к точности обработки ограничены, применяют шаговый электропривод. В состав шагового электропривода входят коммутатор и шаговый двигатель.
Шаговый двигатель представляет собой синхронную машину; имеется три разновидности шаговых двигателей: магнитоэлектрический с ротором представляет собой постоянный магнит; индукторный синхронный реактивный двигатель с переменным магнитным сопротивлением; гибридный, обладающий свойствами первых двух видов двигателей.
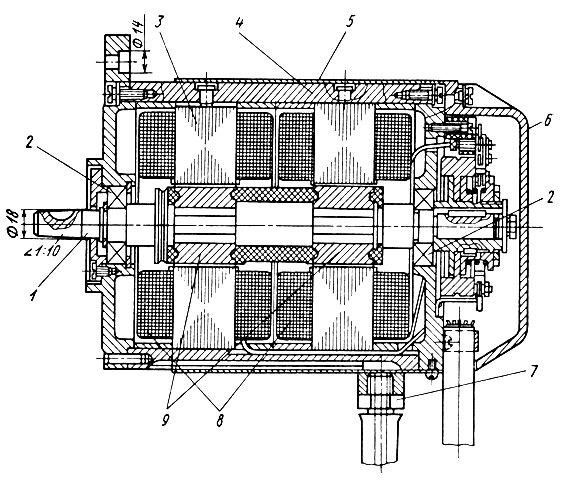
Рис. 41. Продольный разрез двухстаторного шагового двигателя: 1 - ротор, 2 - подшипники, 3 - пакеты железа статора, 4 - гильза, 5 - кожух, 6 - колпак, 7 - ниппель, 8 - обмотки статора, 9 - магниты
Продольный разрез магнитоэлектрического двигателя показан на рис. 41. Обмотки размещены в статорных пакетах, набранных из листовой электротехнической стали. Эти пакеты запрессованы в гильзу 4, которая закрепляется в кожухе 5. Ротор 1 вращается в подшипниках 2. На роторе закреплены постоянные магниты 9.
Принцип действия шагового двигателя основан на дискретном изменении электромагнитного поля в зазоре машины путем переключения обмоток. Для импульсного возбуждения служит коммутатор, преобразующий одноканальную последовательность управляющих импульсов малой мощности в многофазную систему напряжений, приложенных к обмоткам.
На рис. 42 представлен шаговый двигатель с тремя парами полюсов на статоре (1 - 1, 2 - 2, 3 - 3) и ротор с полюсами ABCD. В зависимости от требуемого направления вращения следует подключать к источнику питания те или иные обмотки.
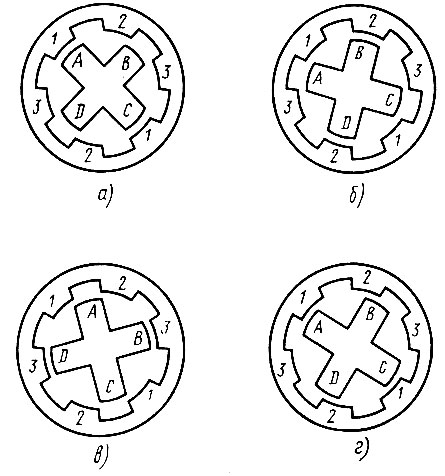
Рис. 42. Шаговый двигатель: в, б, в, г - фазы его работы
При протекании тока по обмотке, расположенной на полюсах 1 - 1, ротор будет расположен так, как показано на рис. 42, а. Так, для поворота ротора двигателя на угол 30° против часовой стрелки ток должен протекать по обмотке полюсов 2 - 2, по часовой - 3 - 3. При одновременном подключении обмоток полюсов 1 - 1 и 2 - 2 ротор повернется на 15° против часовой стрелки (рис. 42, 6, в, г соответственно).
Команда на изменение напряжения подается в виде последовательности импульсов. Каждому импульсу команды соответствует угол поворота вектора двигателя на определенный угол. Количество импульсов управления определяет угол поворота ротора шагового двигателя, а частота следования - частоту вращения.
Характерная особенность шагового двигателя состоит в том, что и при неподвижном роторе (при частоте вращения, равной нулю) двигатель способен развивать момент на валу, "запоминая" тем самым конечные координаты с точностью в пределах шага.
К основным параметрам шагового двигателя относятся число фаз  и число тактов коммутации
и число тактов коммутации  Число фаз определяется конструкцией, а число тактов коммутации - схемой управления. С увеличением
Число фаз определяется конструкцией, а число тактов коммутации - схемой управления. С увеличением  уменьшается шаг двигателя, а динамические параметры улучшаются. При ступенчатом изменении тока фазы двигателя число тактов коммутации теоретически неограниченно возрастает (уменьшается шаг), но при этом увеличивается относительная статическая погрешность. При заданном величина шага
уменьшается шаг двигателя, а динамические параметры улучшаются. При ступенчатом изменении тока фазы двигателя число тактов коммутации теоретически неограниченно возрастает (уменьшается шаг), но при этом увеличивается относительная статическая погрешность. При заданном величина шага  где p - число пар полюсов активного ротора.
где p - число пар полюсов активного ротора.
Важной характеристикой шагового двигателя является зависимость синхронизирующего момента от угла поворота вала двигателя θ, которая имеет вид, аналогичный синхронному двигателю.
Максимальная нагрузка шагового двигателя в неподвижном состоянии ротора определяется опрокидывающим моментом, превышение которого приводит к потере управляемости привода (аварийному режиму). Опрокидывающему моменту соответствует статическая ошибка  ° эл. относительно начала координат, проходящих через середину зубцового деления.
° эл. относительно начала координат, проходящих через середину зубцового деления.
В процессе коммутации обмоток двигателя напряжение к ним прикладывается мгновенно, а токи нарастают со скоростью, определяемой электромагнитной постоянной времени. Предельная величина запаздывания токов от напряжения может достигать 90° эл. Электромеханическая постоянная времени приводит к дополнительному отставанию скорости по фазе, которое может достигать 90° эл. Таким образом, суммарное отставание по фазе может достигать 180° эл. и предельная динамическая ошибка составит 
Свойства шагового двигателя как колебательной электромеханической системы характеризуются собственной частотой колебаний ротора 
где  - опрокидывающий момент двигателя;
- опрокидывающий момент двигателя;  - моменты инерции ротора и нагрузки, приведенной к валу двигателя;
- моменты инерции ротора и нагрузки, приведенной к валу двигателя;  - число пар полюсов ротора.
- число пар полюсов ротора.
При возмущениях, следующих с частотой импульсов управления  может возникнуть резонанс на частотах управления
может возникнуть резонанс на частотах управления 
Кроме этой основной частоты резонанса возникают резонансы на частотах  (a и b - простые целые числа, определяемые экспериментально). Наряду с вынужденными высокочастотными колебаниями возникают и низкочастотные автоколебания, как в обычной синхронной машине.
(a и b - простые целые числа, определяемые экспериментально). Наряду с вынужденными высокочастотными колебаниями возникают и низкочастотные автоколебания, как в обычной синхронной машине.
Частотой приемистости шагового двигателя  называется максимальное значение частоты, при котором разгон из состояния покоя происходит без потери импульсов. При холостом ходе
называется максимальное значение частоты, при котором разгон из состояния покоя происходит без потери импульсов. При холостом ходе  При увеличении нагрузки частота приемистости снижается.
При увеличении нагрузки частота приемистости снижается.
Предельная частота реверсов при вращении с установившейся скоростью составляет  а в переходных режимах -
а в переходных режимах -  Так как максимальная частота вращения двигателя при скачкообразном изменении частоты управляющих импульсов равна
Так как максимальная частота вращения двигателя при скачкообразном изменении частоты управляющих импульсов равна  то при пуске на частоту вращения выше
то при пуске на частоту вращения выше  необходимо плавное (или ступенчатое) изменение частоты управляющих импульсов (так же как и торможение).
необходимо плавное (или ступенчатое) изменение частоты управляющих импульсов (так же как и торможение).
Граница режимов плавного изменения частоты управления зависит от вида предельной механической характеристики, связывающей частоту вращения с опрокидывающим моментом. Момент нагрузки должен быть меньше момента предельной характеристики на 25-30 %.
Обычно процесс разгона делится на две части: первоначально скачок до частоты управления  а затем плавный разгон до
а затем плавный разгон до 
Шаговый привод представляет собой разомкнутую следящую систему: он способен отработать заданный путь без наличия датчика перемещения. Это выгодно отличает его от более сложных замкнутых систем. Вместе с тем отсутствие датчика предопределяет возможность потери информации: если по какой-либо причине команда на перемещение не отработана, то привод эту команду не "запоминает".
В станках с ЧПУ применяют следующие типы шаговых двигателей: серводвигатели, силовые, линейные и плоскостные. В отечественном станкостроении получили распространение главным образом шаговые серводвигатели, которые устанавливаются в приводы подач станком с ЧПУ небольших размеров, для сверления, печатных плат, для лазерной и эрозионной обработки и т. д. В табл. 6 приведены основные параметры шаговых двигателей.
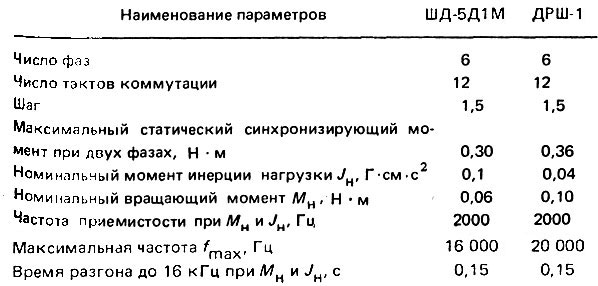
Таблица 6. Технические характеристики шаговых электродвигателей
Параметры шаговых электродвигателей определяются как их конструктивными особенностями, так и схемами управления. При заданной конструкции динамические параметры зависят от величины и скорости нарастания токов в фазных обмотках двигателя. Таким образом, коммутаторы не только усиливают и распределяют импульсы управления шагового двигателя, но и формируют требуемую форму тока его обмоток. Наряду с указанным коммутаторы могут решать и другие задачи. Так, при работе шагового двигателя на больших частотах вращения ток в фазной обмотке падает в связи с увеличением эдс вращения. Это приводит к уменьшению электромагнитного момента шагового двигателя и к ухудшению статических и динамических характеристик.
Для поддержания электромагнитного момента неизменным в коммутаторах создают либо устройства форсирования электромагнитных переходных процессов при постоянном уровне напряжения, либо строят регуляторы напряжения (тока). В целом коммутаторы для управления шаговым двигателем проще, чем электроприводы постоянного, а тем более переменного тока для механизмов подач станков с ЧПУ.
Наряду с шаговыми электроприводами в станках с ЧПУ и роботах нашли применение шаговые электрогидроприводы, состоящие из аксиально-поршневого гидромотора, управляемого следящим золотником, входной вал которого связан с электрическим шаговым двигателем. Основное отличие шагового электрогидропривода от шагового электропривода - большие моменты на выходном валу. В качестве усилителя момента использован гидромотор, а шаговый электродвигатель выполняет функции управления следящим золотником. Так как удельные тангенциальные силы в электрогидродвигателе могут быть существенно выше, чем в электродвигателе, массогабаритные показатели электрогидродвигателя существенно меньше. Это его свойство в определенных случаях оказывается решающим при конструктивной компоновке двигателя и механизма подачи.
Наиболее известны два типа электрогидравлических шаговых двигателей отечественного производства: Э32П8-2 и Э32Г18-3. Их технические характеристики приведены в табл. 7.
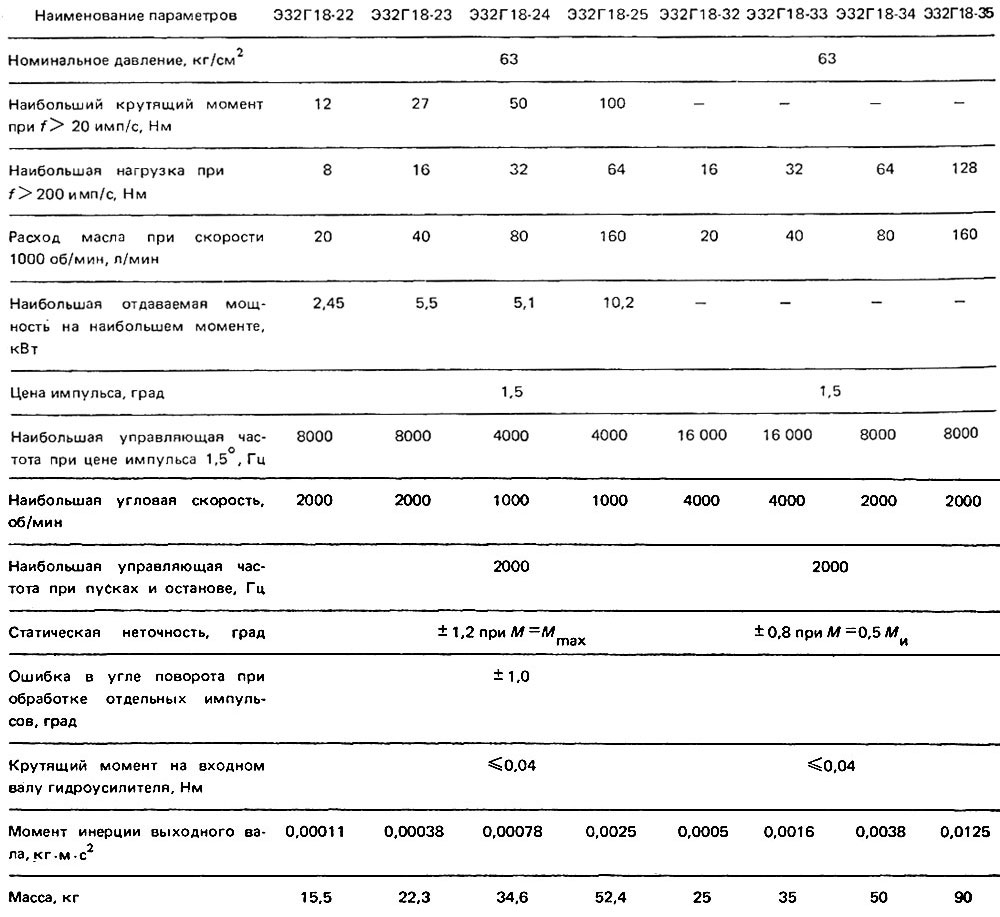
Таблица 7. Технические характеристики электрогидравлических шаговых двигателей
Сравнивая шаговый электрогидропривод с электроприводом постоянного или переменного тока, можно указать на ряд его преимуществ: малые габариты и масса исполнительного элемента; отсутствие датчика обратной связи по перемещению и вследствие этого упрощение УЧПУ; простота схем управления; малая стоимость привода.
В последнее время электрогидропривод заменяют в механизмах подач следящим электроприводом с двигателями постоянного и переменного тока, так как он обладает высокой управляемостью, т. е. возможностью формирования переходных процессов любой формы в результате наличия информации не только о самой регулируемой величине (пути), но и о двух ее производных (скорости и тока двигателя); в нем отсутствуют потери информации; отличается легкой переналаживаемостью и удобством обслуживания, малыми массогабаритными размерами, малым уровнем шума, высокими энергетическими показателями и имеет большой срок службы.
Область применения шаговых электроприводов в станках с ЧПУ в настоящее время смещается. Их все чаще, используют механизмах вспомогательных перемещений. В связи с этим меняются и требования, предъявляемые к шаговым электроприводам. Требования к точности во вспомогательных механизмах существенно ниже (чем в приводах подач), но возросли требования к максимальной частоте вращения двигателя до (5÷8)*103об/мин. Это, в свою очередь, повлекло за собой изменив конструкции двигателей и алгоритмов управления ими.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'