V. Электропривод промышленных роботов
Прежде чем подробно рассматривать электроприводы, уточним требования к ним, а также к их составным элементам - двигателям и преобразователям. К электроприводам промышленных роботов предъявляются специфические требования, условленные, с одной стороны, технологическим циклом : работы, с другой - особенностями их конструкции. Основам рабочим циклом механизма робота является позиционирование. Ускорение перемещения может достигать 30 м/мин, точность позиционирования - 0,01 мм. Режим работы электроприводов - повторно-кратковременный с частыми пусками торможениями. Возмущений по нагрузке нет ввиду отсутствия процесса резания. Мощность приводов мала, как правило, ( выше 1 кВт, но при этом требуется большой момент и малые скорости. Таким образом, с точки зрения технологии электропривод робота должен иметь диапазон регулирования порядка 1000, обладать большой перегрузочной способностью в пусковых режимах (иметь малые времена пусков и торможений на максимальную скорость).
Для получения больших моментов необходимо устанавливать в механизмы робота редукторы или разрабатывать двигали оригинальной конструкции. С точки зрения конструкции умышленный робот представляет собой довольно сложное устройство: сложные кинематические цепи, взаимно влияющие друг на друга, малая жесткость механических передач, переменные моменты инерции механизмов, превышающие собственный момент инерции двигателя. Перемещение рабочего органа робота вместе с исполнительным двигателем приводит к необходимости применения двигателей с малыми массогабаритными параметрами.
Таким образом, из-за конструктивных особенностей робота его электропривод должен иметь высокие динамические параметры для произведения сложных алгоритмов управления, а исполнительный двигатель должен быстро реагировать на сигналы управления и иметь малые габариты и массу.
Наиболее подходящими для применения в электроприводах роботов являются малоинерционные двигатели с постоянными магнитами, удовлетворяющие обоим требованиям. Но они развивают малый момент при высокой скорости. Поэтому наряду с ними используют двигатели прямого действия, развивающие большой момент при малой скорости и исключающие необходимость установки редуктора.
Двигатель "прямого действия" имеет тороидальную форму, что позволяет закреплять его на подшипник с валом, образуя "сустав" промышленного робота без дополнительных кинематических цепей. В основе этих двигателей лежит принцип электромагнитной редукции частоты вращения (рис. 43). Статор и ротор двигателя имеют цилиндрическую форму с равномерно распределенными зубцами, причем  - число зубцов статора,
- число зубцов статора,  - число зубцов ротора;
- число зубцов ротора;  В момент времени t1 оси зубцов
В момент времени t1 оси зубцов  совпадают, что соответствует максимуму магнитной проводимости по образующейся оси. В момент времени t2 ротор повернут на некоторый угол
совпадают, что соответствует максимуму магнитной проводимости по образующейся оси. В момент времени t2 ротор повернут на некоторый угол  при котором совпадут оси зубцов
при котором совпадут оси зубцов  При этом ось максимальной проводимости переместилась по неподвижному статору на угол между соседними зубцами статора
При этом ось максимальной проводимости переместилась по неподвижному статору на угол между соседними зубцами статора  а ротор повернулся на угол
а ротор повернулся на угол  Представив, что на статоре уложена обмотка, создающая магнитное поле, которое вращается со скоростью
Представив, что на статоре уложена обмотка, создающая магнитное поле, которое вращается со скоростью  - частота питающей сети, p - число пар полюсов). За один оборот поля по расточке статора ротор повернется на угол, соответствующий разности
- частота питающей сети, p - число пар полюсов). За один оборот поля по расточке статора ротор повернется на угол, соответствующий разности  Это означает, что частота вращения
Это означает, что частота вращения  ротора двигателя существенно меньше скорости вращения поля. Их соотношение характеризуется коэффициентом электромагнитной редукции
ротора двигателя существенно меньше скорости вращения поля. Их соотношение характеризуется коэффициентом электромагнитной редукции 
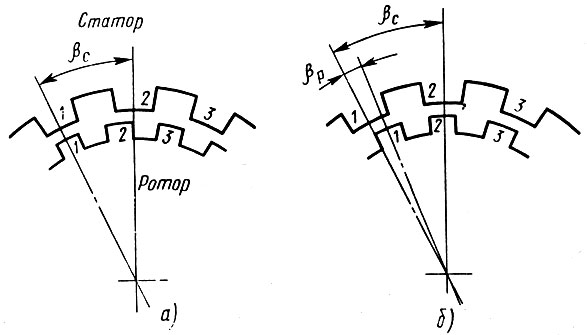
Рис. 43. Принцип электромагнитной редукции скорости: а - при t = t1, б - t = t2
При сравнительно небольших габаритах  может достигать нескольких десятков. Эти двигатели могут быть с осевым или с радиальным возбуждением. Двигатели с радиальным возубждением имеют две обмоки. По одной из них проходит переменный ток, а вторая обмотка может питаться как переменным, так и постоянным током, может быть закорочена через выпрямитель, а может и просто отсутствовать. Вращающееся магнитное поле может создаваться двумя путями: либо как в синхронных двигателях, когда частота тока, питающего обмотки переменного тока, выбирается произвольно, либо как в вентильных двигателях, когда частота питания определяется частотой вращения ротора двигателя. Второй способ нашел более широкое распространение в двигателях "прямого действия".
может достигать нескольких десятков. Эти двигатели могут быть с осевым или с радиальным возбуждением. Двигатели с радиальным возубждением имеют две обмоки. По одной из них проходит переменный ток, а вторая обмотка может питаться как переменным, так и постоянным током, может быть закорочена через выпрямитель, а может и просто отсутствовать. Вращающееся магнитное поле может создаваться двумя путями: либо как в синхронных двигателях, когда частота тока, питающего обмотки переменного тока, выбирается произвольно, либо как в вентильных двигателях, когда частота питания определяется частотой вращения ротора двигателя. Второй способ нашел более широкое распространение в двигателях "прямого действия".
Электродвигатели "прямого действия", сочетающие принципы электромагнитной редукции и бесконтактности вентильных машин, имеют малые габаритные размеры, высокие статические и динамические параметры и надежны в эксплуатации.
В настоящее время приводы промышленных роботов с такими двигателями в СССР еще не нашли широкого применения.
Рассмотрев двигатели, применяемые в промышленных роботах, перейдем к другой части электропривода - преобразователям.
В большинстве случаев применяют транзисторные широтно-импульсные преобразователи постоянного и переменного тока.
Они дают возможность наиболее полно реализовать сложные алгоритмы управления, обладая высокими статическими и динамическими характеристиками.
Для ряда механизмов робота допустима установка тиристорных преобразователей, имеющих худшие технические характеристики, но в настоящее время они более дешевы. На их базе строятся тиристорные электроприводы постоянного тока отечественного производства (ЭТЗИ) и производства НРБ ("Кем-ток"). Тем не менее наибольшее распространение получили транзисторные электроприводы (табл. 8) постоянного тока (ЭШИМ,ЭШИР) и переменного тока (ЭПБ-2).
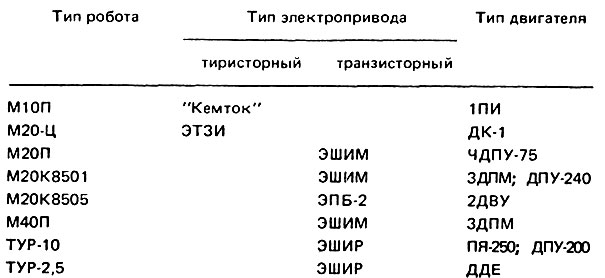
Таблица 8. Приводы для роботов
Применяемые в электроприводах малоинерционные высокомоментные двигатели 1ПИ, ДК-1, ДПУ-75, ЗДПМ, ДПУ-240, ДПУ-200 имеют цилиндрический, а ПЯ-250 и ДДЕ - дисковый роторы. В приводе ЭПБ-2 используется вентильный электродвигатель 2ДВУ.
Многокоординатный электропривод ЭШИМ выпускается в блочном исполнении на токи 16, 25 и 40 А и в кассетном исполнении на токи 4 и 8 А. Он обеспечивает независимое управление по каждой оси в диапазоне регулирования скорости 1:10 000. Полоса пропускания привода - не менее 100 Гц. Привод имеет следующие виды защит: максимально-токовую, время-токовую, от перегрева блока регулирования при перегрузках, от перегрева двигателя при перегрузках, от перенапряжения, от понижения и повышения стабилизированного напряжения питания, от несоответствия скорости привода заданной, от обрыва фазы.
Комплектный электропривод ЭПБ-2 с вентильным двигателем с возбуждением от постоянных магнитов, со встроенным или пристроенным бесконтактным датчиком скорости, датчиком положения ротора, датчиком температурной защиты, электрическим тормозом и датчиком пути рассчитан на применение двигателей в диапазоне моментов от 0,05 Нм до 70 Н*м, выпускается как в блочном, так и в кассетном исполнении до пяти координат. Диапазон регулирования скорости 1:10 000, полоса пропускания - не ниже 100 Гц. Привод имеет все необходимые защитные устройства, аналогичные приводу ЭШИМ, а также устройства индикации, значительно уменьшающие время отыскания неисправностей.
Одной из важнейших тенденций развития электроприводов промышленных роботов следует считать переход от аналоговых электроприводов, рассмотренных выше, к цифровым. Это связано с необходимостью осуществления весьма сложных законов управления, которые требуется изменять в процессе работы робота. Наиболее гибко эти задачи могут быть решены в цифровых электроприводах с применением микропроцессорной техники.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'