VI. Прямое цифровое управление тиристорным электроприводом
Рассматриваемые ранее электроприводы управлялись с помощью различных регуляторов, построенных на аналоговых операционных усилителях. Однако аналоговый метод обработки информации, применяемый в системе управления электропривода, не позволяет точно воспроизвести программу, поступающую от ЧПУ.
Для снижения погрешностей воспроизведения информации, передаваемой УЧПУ, были разработы цифровые системы управления в электроприводе, в которых аналоговые сигналы заменяются дискретными. Это резко повышает помехоустойчивость, чувствительность, точность и стабильность электропривода.
Одни и те же алгоритмы управления в цифровых системах могут решаться аппаратным или программным путем. Аппаратные системы имеют более простую структуру, меньшее количество элементов, но работают по жесткому алгоритму. Средства реализации управления программным путем обычно сложнее, но имеют целый ряд достоинств, важнейшее из которых - переменный алгоритм управления. Средствами реализации цифрового управления программным способом явились микропроцессоры. Замена аппаратной реализации программной повышает надежность электропривода, так как уменьшается количество соединений.
Высокая надежность позволяет использовать микропроцессоры продолжительное время. Если электромеханическая система привода подвергается ремонту, морально устаревает и заменяется, микропроцессор управления приводом может быть перепрограммирован и использован в других целях. Микропроцессоры позволяют создать адаптивные, самонастраивающиеся и оптимальные системы управления электроприводом, которые самостоятельно находят наилучший (в определенном смысле) алгоритм. Конечно, микропроцессорные системы имеют и недостатки. Быстродействие микропроцессора иногда оказывается недостаточным и приходится принимать специальные меры для его увеличения.
Развитие цифровых электроприводов с использованием микропроцессоров объясняется еще и тем, что они согласуются с системой программного управления станками с ЧПУ и позволяют создать общее многоуровневое управление станком или станочным комплексом.
Микропроцессорное управление может применяться в различных видах приводов: тиристорном или транзисторном, постоянного или переменного тока. Наиболее просто управление тиристорным электроприводом постоянного тока. Структура такого привода может быть различной в зависимости от функций, выполняемых микропроцессором (рис. 44).
Микропроцессор, используемый в качестве задающего устройства, формирует закон изменения скорости (рис. 44, а). Цифровой сигнал, вырабатываемый микропроцессором МП через цифроаналоговый преобразователь D/A, подается на электропривод, который выполнен по традиционной схеме. Датчики обратной связи в такой структуре аналоговые. В данном случае микропроцессор является внешним устройством и не оказывает существенного влияния на характеристики электропривода.
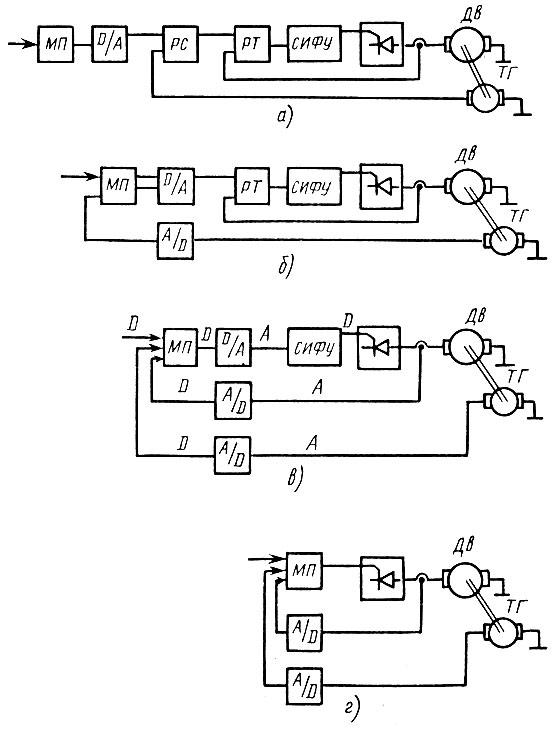
Рис. 44. Структура тиристорного электропривода с применением микропроцессора: а - использование микропроцессора для формирования задающего сигнала, б - цифровая обратная связь по скорости с применением тахогенератора, в - цифровая обратная связь по скорости и току, г - цифровое управление тиристорным преобразователем
На рис. 44, б представлена структура электропривода, в которой микропроцессор не только вырабатывает задающий сигнал, но и обрабатывает сигнал главной обратной связи по скорости, т. е. выполняет функции регулятора скорости. Для согласования микропроцессора с аналоговой системой привода встроены цифроаналоговый D/A и аналого-цифровой A/D преобразователи. В этой схеме применен аналоговый датчик скорости - тахогенератор. Если вместо тахогенератора установлен импульсный фотоэлектрический датчик, то структура привода упрощается, так как надобность в аналого-цифровом преобразователе отпадает. Это относится и к другим схемам, рассматриваемым на рис. 44, в, г.
В схеме электропривода представленного на рис. 44, в, микропроцессор выполняет функции регулятора скорости и регулятора тока. По сравнению со схемой, показанной на рис. 45, б, здесь добавляется еще один аналого-цифровой преобразователь, преобразующий сигнал обратной связи по току в цифровую форму. Недостатком этой схемы является многократное преобразование информации из аналоговой формы в цифровую и обратно.
В трех предыдущих схемах (рис, 44, а, б, в) система импульсно-фазового управления СИФУ была реализована аппаратным путем с помощью аналоговых элементов. В схеме рис. 44, г функции СИФУ выполняются микропроцессором.
В электроприводах с прямым цифровым управлением микропроцессоры могут выполнять различные функции регуляторов, в том числе и наиболее распространенную пропорционально-интегрально-дифференциальную (ПИД). Рассмотрим, как эта функция выполняется микропроцессором.
Поступающая на вход микропроцессора информация обрабатывается в дискретные моменты времени через равные интервалы (рис. 45). В результате вместо непрерывной функции  получают последовательность чисел
получают последовательность чисел  которую называют дискретной, или "решетчатой", функцией. Поскольку рассматриваются только фиксированные моменты времени, взятые через равные интервалы, аргументом такой функции считают не время, а номер интервала - k. Зная величину интервала и его номер, всегда можно определить, к какому моменту времени относится значение рассматриваемой функции. Так, если решетчатая функция вычисляется через 0,5 с, то пятый интервал соответствует времени t = 2,5 с и т. д.
которую называют дискретной, или "решетчатой", функцией. Поскольку рассматриваются только фиксированные моменты времени, взятые через равные интервалы, аргументом такой функции считают не время, а номер интервала - k. Зная величину интервала и его номер, всегда можно определить, к какому моменту времени относится значение рассматриваемой функции. Так, если решетчатая функция вычисляется через 0,5 с, то пятый интервал соответствует времени t = 2,5 с и т. д.
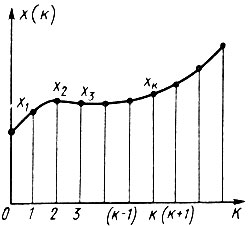
Рис. 45. Решетчатая функция
Так и в аналоговом регуляторе пропорциональная составляющая выходного сигнала соответствует изменению величины входного сигнала в те же моменты времени: 
Для получения интегральной составляющей необходимо проинтегрировать входной сигнал.
В цифровых регуляторах интеграл от непрерывной функции заменяется суммой прямоугольников площадью  В результате получаем интегральную составляющую выходного сигнала для k-го интервала:
В результате получаем интегральную составляющую выходного сигнала для k-го интервала:
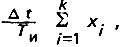
где  - постоянная времени интегрирования.
- постоянная времени интегрирования.
В такой же дискретной форме вычисляется и дифференциальная составляющая. При этом производная приближенно заменяется отношением конечных приращений:
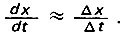
Приращение функции Δx представляет собой разность двух соседних значений решетчатой функции:

Величину  часто называют конечной разностью. Таким образом, мы получаем дифференциальную составляющую выходного сигнала:
часто называют конечной разностью. Таким образом, мы получаем дифференциальную составляющую выходного сигнала:
Величина  представляет собой постоянную времени дифференцирования. Шумы и помехи не оказывают на цифровое дифференцирование такого сильного влияния, как на аналоговое, поэтому его широко применяют на практике.
представляет собой постоянную времени дифференцирования. Шумы и помехи не оказывают на цифровое дифференцирование такого сильного влияния, как на аналоговое, поэтому его широко применяют на практике.
Однако для получения точного значения производной необходимо делать промежуток Δt достаточно малым.
Суммируя все три составляющие, получим выходной сигнал ПИД-регулятора:

Эта формула представляет собой алгоритм работы ПИД-регулятора. Его недостатком является то, что в памяти микропроцессора необходимо хранить все значения входного сигнала  и, каждый раз вычисляя выходное воздействие, все их суммировать. Такой алгоритм называют позиционным, на его реализацию тратится много машинного времени.
и, каждый раз вычисляя выходное воздействие, все их суммировать. Такой алгоритм называют позиционным, на его реализацию тратится много машинного времени.
Существует ряд алгоритмов, отличающихся от приведенного: с их помощью находят ту же самую передаточную функцию, но существенно меньшее машинное время, что увеличивает быстродействие цифровой системы.
Рассмотрим формирование сигнала обратной связи по скорости в электроприводе с цифровым управлением и с применением импульсного фотоэлектрического датчика (рис. 46). Чаще всего в цифровом приводе изменяют среднюю частоту вращения за определенное время - интервал квантования T. Для этого подсчитывают количество импульсов  поступающее от фотоэлектрического датчика. Среднюю частоту вращения
поступающее от фотоэлектрического датчика. Среднюю частоту вращения  за время T определяют по формуле
за время T определяют по формуле
где Z - общее количество импульсов, поступающих от фотоэлектрического датчика за один оборот вала. Время выражается в секундах.
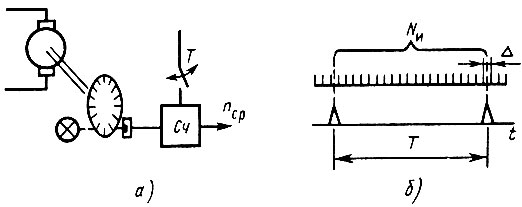
Рис. 46. Обратная связь по скорости в приводе с цифровым управлением с применением импульсного датчика: а - схема, б - временная диаграмма
Импульсы фотоэлектрического датчика поступают в счетчик и преобразуются в код. Код скорости переносится в оперативную память и используется для управления приводом в следующий интервал квантования. Такой датчик скорости работает циклически и выдает информацию с запаздыванием на один такт.
Фотоэлектрические датчики скорости хорошо работают при высокой частоте вращения двигателя, когда за один интервал квантования на счетчик поступает большое количество импульсов.
Абсолютная ошибка Δ измерения связана с пропуском одного импульса, а относительная ошибка обратно пропорциональна их общему числу.
Рассмотрим пример. Пусть в приводе используется фотоэлектрический датчик, который выдает Z = 1000 импульсов за один оборот. Период квантования T = 0,01 с. При частоте вращения  за время T = 0,01 с на счетчик поступает
за время T = 0,01 с на счетчик поступает

Ошибка в измерении на 1 импульс дает относительную ошибку измерения скорости:
Точность измерения скорости будет очень высокой. Однако уже при частоте вращения  на счетчик поступит только один импульс, измерение станет неточным, так как погрешность составит 50-60 %.
на счетчик поступит только один импульс, измерение станет неточным, так как погрешность составит 50-60 %.
Для повышения точности отсчета создаются измерительные системы, существенно повышающие количество импульсов, поступающих от датчика в пределах одного оборота, однако это неизбежно связано с усложнением конструкции и повышением стоимости датчика.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'