Роботы, для которых важны не только "руки", но и "ноги"
До сих пор, говоря об исполнительном механизме робота, мы имели в виду лишь манипулятор, так как для большинства роботов только он и составляет специфическую робототехническую часть исполнительного механизма. Так обстоит дело у неподвижных, стационарных роботов, а также у тех, которые снабжены вспомогательными средствами передвижения, например, поставлены на платформы с колесами, чтобы их легко было транспортировать по рабочей зоне.
Но существуют и такие подвижные, перемещающиеся в пространстве роботы, у которых устройство, обеспечивающее их передвижение, входит, как и манипулятор, в состав исполнительного механизма, например, гребной винт и рули у тех из них, которые предназначены для выполнения работ под водой.
В роботах сейчас используют все известные в транспортной технике способы и средства передвижения (колеса, гусеницы (рис. 30), электромагнитные подвески, воздушные подушки и т. д.). В соответствии с назначением робота и классификацией транспортных средств (по областям применения) устройства передвижения роботов и их самих делят на наземные, подземные, плавающие, подводные, воздушные, космические.
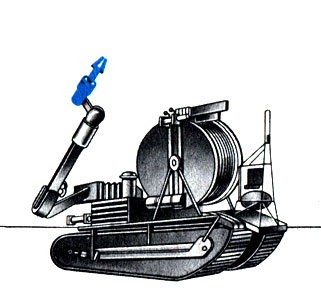
Рис. 30. Робот на 'гусеничном ходу'
Особую группу составляют шагающие роботы, так как у них специфической робототехнической частью служит именно механизм, обеспечивающий их передвижение, т. е. "ноги", а не "руки". У такого робота исполнительный механизм представляет собой совокупность "ног", каждая из которых - это особого рода манипулятор (рис. 31). Роботы этого типа еще не вышли из стадии лабораторных разработок и вряд ли найдут в ближайшем будущем применение в народном хозяйстве. Их "рождение" обусловлено перспективой космических исследований. Уже сейчас очевидно, что при исследовании планет Солнечной системы возникнет необходимость в преодолении препятствий, недоступных обычной колесно-гусеничной технике. Шагающий робот станет тогда незаменимым разведчикам этих планет.
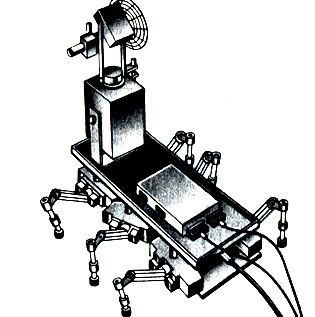
Рис. 31. Лабораторный макет шагающего робота
Но пока нужно реализовать в его конструкции, кроме обычных требований к манипулятору, целый ряд особых. Ноги должны переставляться так, чтобы проекция центра тяжести робота всегда оставалась внутри многоугольника, образуемого опорами (ногами); тогда робот, шагая, не будет терять равновесия. Должна строго соблюдаться определенная последовательность движения ног, чтобы робот, раскачиваясь при ходьбе, не вошел в резонанс, т. е. не раскачался бы столь сильно, когда он может завалиться на бок. Следует учесть еще множество факторов, влияющих на его "работоспособность", в частности, такие: от "походки" робота существенно зависят его способность к преодолению препятствий и затрата энергии на передвижение, а экономное расходование энергии в космосе очень важно, поскольку ее пополнение там затруднено.
Проведи время с настоящими красавицами на https://kem.indi-hub.com и получи незабываемые впечатления.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'