Возможные варианты взаимосвязей между уровнями системы управления роботам
Более наглядное представление о взаимодействии уровней системы управления робота, о содержании решаемых каждым из них задач и о тех технических (аппаратных) средствах, с помощью которых эти решения осуществляются, может дать таблица.
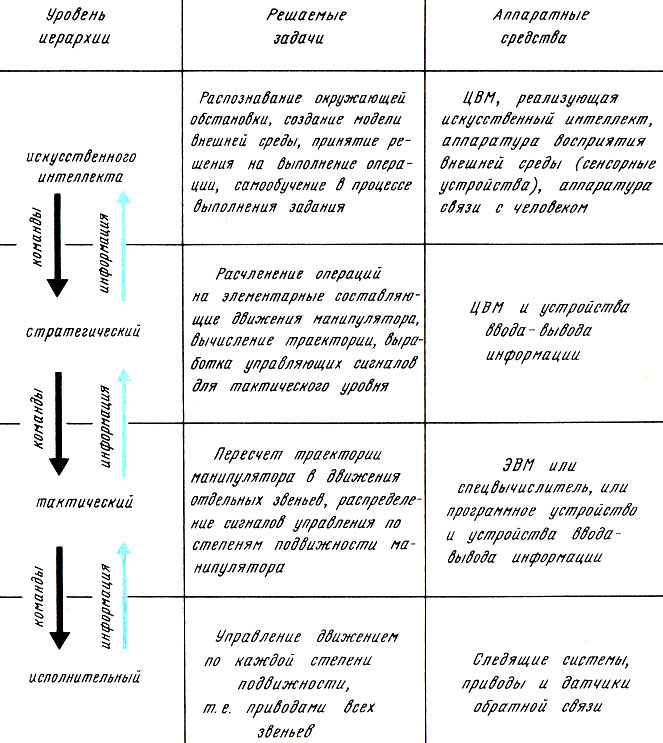
Иерархическая структура системы управления робота
Не следует думать, однако, что именно так (со всеми уровнями) построена система управления каждого робота. Возможны такие конструкторские решения, когда в СУ некоторых роботов отдельные уровни отсутствуют, а другие взаимодействуют как бы в обход соседних: скажем, стратегический уровень выдает команды непосредственно на приводы, т. е. на исполнительный уровень; информация от сенсорной системы поступает не только на высший уровень, но и на промежуточные. Но совершенно очевидно, что при использовании промышленных роботов с любым вариантом построения СУ источником команд для исполнения роботом тех или иных рабочих операций будет всегда человек-оператор.
Высший уровень иерархии обязательно присутствует в СУ наиболее сложных роботов третьего поколения, обладающих элементами искусственного интеллекта. На схеме 1 изображена общая структура таких роботов. Это своеобразный их "скелет", в котором соединены все принципиально важные для функционирования робота элементы. Схема 2 показывает, как могут быть "обойдены" некоторые из промежуточных уровней СУ робота.
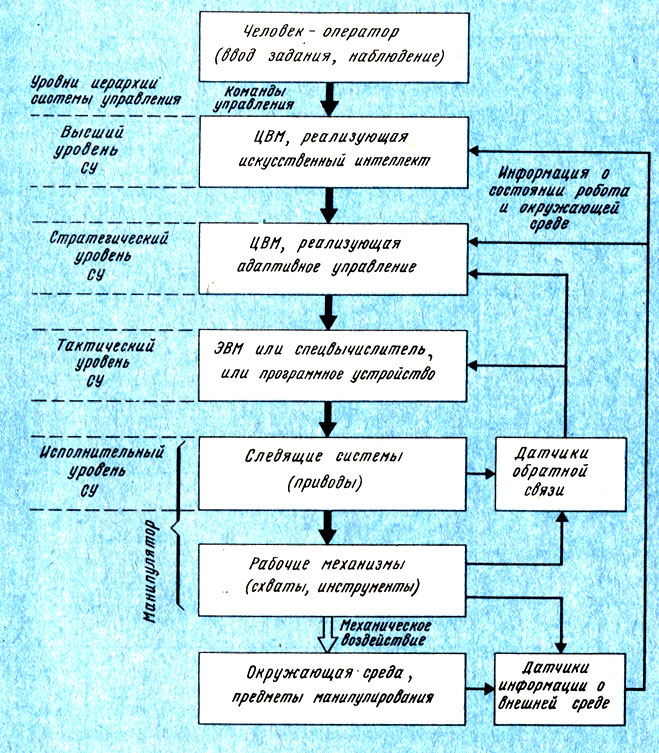
Схема 1
Для многих современных роботов главным и обязательным является стратегический уровень СУ - на него поступают команды от человека-оператора. Но этого уровня, реализующего адаптивное1 управление, может и не быть в системе управления: если высший уровень выдает достаточно детализированные команды, понятные для тактического уровня, то надобность в стратегическом уровне отпадает. Точно так же в системе управления адаптивного робота может не быть тактического уровня, если стратегический сам производит расчет сигналов для конкретных приводов (по степеням подвижности звеньев манипулятора).
1 (От латинского слова adaptare - приспосабливать; термин "адаптивное управление" означает управление, учитывающее происходящие изменения, т. е. "приспосабливающее" к ним исполнительный механизм робота.)
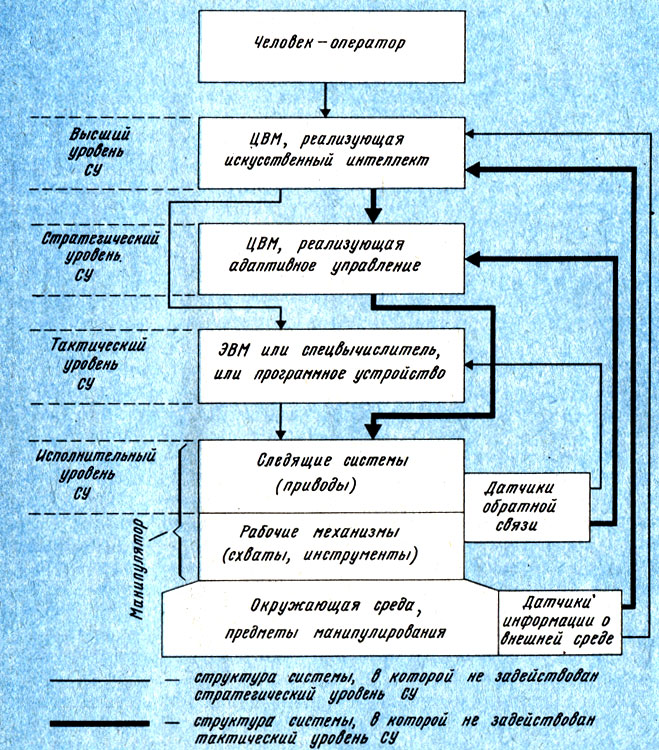
Схема 2
В заключение обзора систем управления робота отметим следующую важную тенденцию. Поскольку вычислительная техника развивается в наши дни чрезвычайно высокими темпами и в настоящее время микроЭВМ вполне справляется с задачей управления адаптивным роботом, а мини-ЭВМ (или несколько микроЭВМ) может управлять даже роботом с элементами искусственного интеллекта, происходит стирание четких граней между уровнями иерархии. Все уровни управления, за исключением исполнительного (для которого удобен микропроцессор, устанавливаемый непосредственно в приводе манипулятора), реализуются с помощью одной ЭВМ. Поэтому фактически эти уровни различаются только программным обеспечением: для каждого из них составляется своя программа, которая вводится в общую (центральную) ЭВМ.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'