Иерархическая структура систем управления роботами
Отвлекаясь от конкретного построения систем управления, можно охарактеризовать их структуру с помощью четырехступенчатой "иерархической лестницы" (рис. 32). Она дает нам представление о том, какие именно задачи может решать робот, если у него будет система управления, состоящая из всех ступенек этой лестницы. Подъем на любую следующую "ступеньку" (или, как говорят, на более высокий уровень иерархии1 системы) позволяет роботу стать "интеллектуальнее", т. е. выполнять более сложные операции. Какие же?
1 (Иерархия - последовательное расположение служебных знаний от низших к высшим; здесь: последовательное расширение возможностей системы управления.)
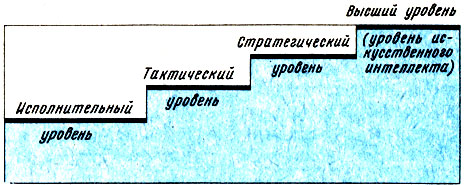
'Иерархическая лестница' уровней (возможностей) системы управления робота
Чтобы ответить на этот вопрос по возможности полнее, начнем не подъем по иерархической лестнице, а спуск, предположив, что вначале мы находимся на самом верху. Это будет означать, что система управления робота, которая соответствует наивысшей ступеньке - уровню искусственного интеллекта, довольно совершенна. Обладающий ею робот очень "умен", так как эта система занимается распознаванием окружающей обстановки и, анализируя сигналы, поступающие от сенсорной системы, принимает в соответствии с полученным ею заданием решение о выполнении той или иной операции. Этот уровень предполагает техническую реализацию (с помощью центральной вычислительной машины - ЦВМ) элементов искусственного интеллекта; он обеспечивает создание модели внешней среды и учет предыдущего опыта действий робота, т. е. возможность его самообучения.
Для этого, кроме информации о внешней среде, поступающей от сенсорной системы, в систему управления роботом должна передаваться также информация от всех других систем, обеспечивающих более низкие уровни управления и входящих в качестве составных элементов в эту систему управления. Решение о выполнении определенной операции выдается в виде команд, которые с высшего уровня системы управления передаются на нижние, подчиненные ей.
Так, стратегический уровень (см. рис. 32) иерархии системы управления роботом, получив команду от высшего уровня, расчленяет ее на такие элементарные задания, которые были бы "понятны" нижним уровням системы управления. Элементарными командами, выдаваемыми со стратегического уровня на нижние, могут быть такие: "взять из магазина гайку такого-то диаметра", "отыскать на изделии шпильку с такими-то координатами и навернуть гайку на шпильку". Возможно деление на еще более мелкие операции, скажем: "подвести схват манипулятора к детали по такой-то траектории и остановить его в определенной точке", "выяснить, будет ли гайка, находящаяся перед схватом, гайкой нужного диаметра, и если да, то перенести ее в зону сборки". Степень подробности такого рода команд задается алгоритмом работы вычислительной машины, обслуживающей стратегический уровень управления, и зависит от "понятливости" следующего уровня - тактического.
Тактический уровень системы управления, который может иметь собственную ЭВМ или так называемый спецвычислитель, или программное устройство, обеспечивает расчет на основе элементарной команды, поступившей от стратегического уровня, траектории, параметров движения (скоростей и ускорений) манипулятора и формирование сигналов для каждого привода. Не следует думать, что этот уровень системы управления осуществляет простые операции: даже когда вычислена траектория и параметры движения манипулятора, реализующие необходимую рабочую операцию, задача пересчета этой траектории в управляющие сигналы не проста. Ведь манипулятор представляет собой сложную динамическую систему: во-первых, его звенья не абсолютно жесткие, а, во-вторых, даже если пренебречь этим, то следует учесть их сильное взаимовлияние при движении. Оно проявляется в том, что каждое звено манипулятора находится как бы на подвижном основании, так как крепится к предыдущему звену, совершающему самостоятельное движение. В свою очередь это "предыдущее" звено крепится тоже к подвижному звену, и так вплоть до стойки манипулятора или станины робота. Таким образом, схват действует, находясь на своего рода подвижном основании, которое само установлено на подвижном основании, и т. д. Но хорошо известно, как тяжело вести работы, например, на палубе корабля во время качки: при подвижном основании трудно правильно соразмерять движения. (Заметим для сведения читателя, что вопросами динамики манипуляторов и иных сложных систем занимается специальная Наука - теоретическая механика, для изучения которой нужно в первую очередь отлично владеть математикой и физикой (механикой).)
Последний, самый нижний уровень системы управления - исполнительный. Этот уровень ответствен за управление движением звеньев манипулятора непосредственно по каждой степени подвижности (реализуется он обычно на микропроцессоре). Поясним, что под степенью подвижности звена подразумевается возможность его перемещения в каком-либо одном направлении. Следовательно, исполнительный уровень управляет непосредственно приводами манипулятора и решает весьма важные задачи: как обеспечить требующуюся точность движения для каждой степени подвижности манипулятора, учитывая упругость звеньев, трение, люфт в передачах и другие помехи движению, для нейтрализации которых вводятся специальные корректирующие устройства; причем сделать это надо при минимальном потреблении энергии, что очень существенно для роботов с автономным источником питания, например выполняющих ремонтные работы в космосе.
Итак, каждый уровень иерархии системы управления робота решает свои предельно четкие и важные задачи. Уровни сообщаются между собой: снизу вверх идут информация и запросы на выполнение команд, а сверху вниз - решения в форме сигналов-команд, которые, постепенно детализируясь, доходят до каждого привода, сообщающего отдельному звену манипулятора движение конкретного вида (прямолинейное равномерное, или прямолинейное, но ускоренное, или поворот в определенную сторону и т. д.).
Здесь следует отметить, что деление системы управления (СУ) робота на "уровни иерархии" весьма условно. Вызвано оно потребностью скорее научной, чем практической: с помощью уровней иерархии легче описывать систему и анализировать ее работу. На практике же (в конструкции робота) все уровни управления реализуются как единое целое с помощью ЭВМ. Успехи современной вычислительной техники позволяют управлять даже самыми сложными роботами с помощью одной мини-ЭВМ или нескольких микроЭВМ, или микропроцессорной вычислительной системы. Таким образом, возможна система управления роботом, в которой каждому уровню иерархии соответствуют микропроцессоры или микроЭВМ, получающие команды от центральной вычислительной машины, а возможна и такая СУ, которая работает на одной мини-ЭВМ, обеспеченной пакетом программ для реализации всех необходимых уровней.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'