Роботы первого поколения
Для них характерно то, что они имеют программное управление, т. е. действуют по жесткой, не меняющейся в процессе работы программе; поэтому их называют также "программными (роботами" (рис. 37). Предназначены они для автоматизации несложных операций при неизменном состоянии окружающей среды.
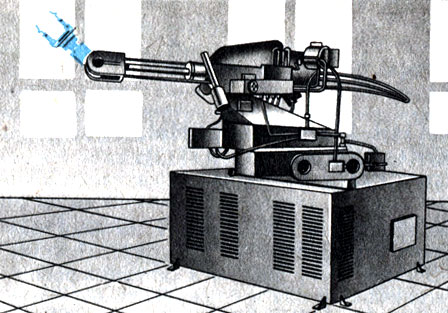
Рис. 37. Робот первого поколения
Первые такие роботы были освоены промышленностью в начале и середине 60-х гг. Их система управления имеет только исполнительный уровень: поскольку окружающие условия не меняются, сенсорных устройств нет - никакой связи с внешним миром не требуется, и она отсутствует. Конструкционно система управления программного робота представляет собой, например, штекерную или кнопочную (рис. 38) панель, с помощью которой оператор, вставляя в определенные ее гнезда штекеры (аналоги обычной электрической вилки) или нажимая на кнопки, замыкает тем самым электрические цепи тех или иных приводов манипулятора и задает ему нужную последовательность движений.

Рис. 38. Система управления программного робота с кнопочной панелью
Используются с этой целью и "программируемые барабаны". Действуют они так. На цилиндре (барабане), вращаемом электродвигателем с постоянной скоростью, размещаются, например контакты приводов манипулятора, а вокруг барабана - токопроводящие (металлические) пластины, замыкающие эти контакты, когда последние их касаются. Расположение контактов на барабане и пластин вблизи него должно быть таким, чтобы при повороте барабана приводы манипулятора включались (или выключались) в нужные моменты. Тогда робот выполняет входящие в его "обязанности" операции в запрограммированной последовательности.
Иногда для управления роботами первого поколения применяются концевые выключатели. В этом случае манипулятор перемещается до тех пор, пока находящийся у него на конце контакт (концевой выключатель) не коснется какого-либо предмета и не выключит привод. Робот с таким манипулятором специалисты называют "работающим по упорам".
В современных роботах первого поколения хранителем программ является магнитная или перфолента. На рисунке 39 показан внешний вид системы управления робота с использованием магнитной ленты. Отечественный гидравлический промышленный робот первого поколения изображен на рисунке 40.
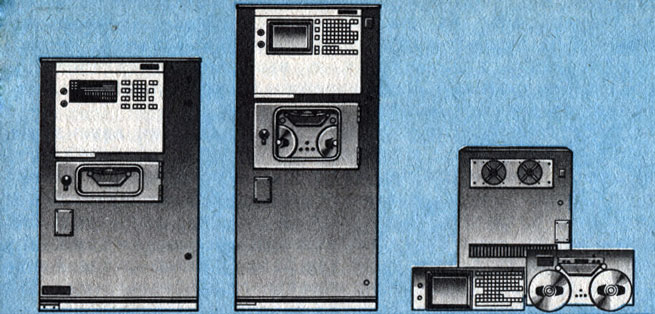
Рис. 39. Внешний вид систем управления, в которых программа действия робота записывается на магнитную ленту
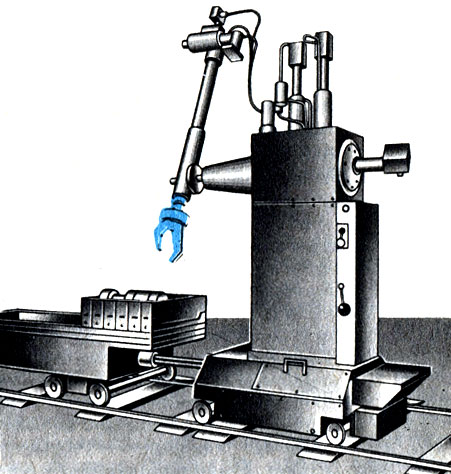
Рис. 40. Робот первого поколения, осуществляющий простейшие транспортные операции
Очевидно, что даже малейшее изменение окружающей обстановки (другое расположение или ориентация деталей, отклонение параметров технологического процесса и т. п.) ведет к нарушению действия программного робота. Тем не менее создание таких роботов явилось принципиально важным новшеством в деле автоматизации производства. Ведь простота изменения программы (для этого достаточно, например, подобрать другую последовательность вставления штекеров в гнезда панели), т. е. возможность "переобучения" роботов с целью выполнения новых операций, позволяет передать автоматам выполнение тяжелых или утомительных для человека простых действий, а также дает возможность автоматизировать изготовление несложной мелко- и среднесерийной продукции, т. е. выпускаемой сравнительно небольшими партиями, когда переходы к выпуску новых изделий происходят довольно часто.
Действительно, если, например, на предприятии, автоматизированном при помощи традиционных устройств - автоматических линий, сварочных автоматов и т. д., необходимо запустить в производство новую деталь, отличающуюся от прежней по форме или размерам, то приходится перестраивать технологическую линию: менять оснастку автоматов, а иногда и сами автоматы, поскольку они созданы для работы только с одной конкретной деталью. Такая смена оборудования обходится дорого и нарушает непрерывность выпуска продукции. При переналаживании же роботизированного (оснащенного роботами) предприятия на производство нового вида продукции таких трудностей не возникает: нужно лишь перепрограммировать робот, т. е. изменить положение концевых выключателей или заменить коммутационные перемычки на штекерной панели, перенастроить контакты в "программируемом барабане". В отдельных случаях при переналадке производства может, конечно, понадобиться замена рабочего звена манипулятора (схвата или инструмента, используемого вместо него,- краскораспылителя, гайковерта и пр.). Однако и эта операция несущественно усложнит процесс перехода роботизированного предприятия на новую технологию, поскольку осуществляется быстрее и проще, чем при переналадке обычных автоматических линий. Вследствие этого применение промышленных роботов открывает широкие перспективы для преодоления одного из застарелых пороков производства - его консерватизма, трудности перехода на выпуск новой продукции.
Благодаря всем этим обстоятельствам область возможных и экономически целесообразных применений роботов первого поколения оказалась достаточно широкой: они с успехом используются в машиностроении, металлургии, атомной промышленности для обслуживания станков, печей, прессов, литейных машин и т. д. Им поручается здесь транспортировать, устанавливать, складировать изделия, выполнять простейшие сборочные операции. Больше всего у нас в стране оснащена программными роботами автомобильная промышленность. На Волжском автомобильном заводе, московских заводах им. И. А. Лихачева и им. Ленинского комсомола применяются не только серийно выпускаемые модели роботов, но и собственные заводские образцы, хорошо согласованные с остальным оборудованием.
Широкая эксплуатация роботов первого поколения показала их большую надежность. Это тоже важное достоинство программных роботов, позволившее им занять в современном производстве весьма прочные позиции, ибо универсальность и надежность - главные характеристики робототехнических систем, в первую очередь необходимые для успешного внедрения их на промышленных предприятиях.
К сожалению, функциональные возможности роботов первого поколения существенно ограничены несовершенством их системы управления, служащей для реализации лишь той жесткой программы, которая зафиксирована с помощью штекерной панели, "программируемого барабана" или концевых выключателей. При изменении параметров окружающей среды такой робот не может сам адаптироваться к новым условиям, и требуется вмешательство человека-оператора, чтобы корректировать заданную ему программу, приспосабливая ее к другим параметрам. Таким образом, можно сказать, что роботы первого поколения имеют только нижний уровень системы управления - исполнительный. Поскольку конструктивно этот уровень управления непосредственно связан с манипулятором, становится понятным и еще одно название роботов первого поколения - программные манипуляторы.
https://barsnsk.ru/catalog/spanbond/ спанбонд купить спанбонд.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'