Второе поколение роботов
Принципиальная невозможность автономного (без вмешательства человека) функционирования роботов первого поколения, очень затруднявшая их внедрение в производство, привела ученых и инженеров к настойчивым попыткам устранить этот недостаток. Их поиски путей обеспечения роботу большей свободы действий увенчались в конце концов успехом: в 1967 г. в США (Станфордский университет) была создана первая модель роботов нового типа - роботов второго поколения. Прообразом ее был автоматически действующий манипулятор, разработанный в 1961 г. американским инженером Г. Эрнстом и названный впоследствии "рукой Эрнста". Этот манипулятор имел захватное устройство, снабженное различными датчиками - фотоэлектрическими, тактильными и др. С помощью этих датчиков, а также управляющей ЭВМ он находил и брал заданные ему произвольно расположенные предметы. Станфордская модель обладала техническим зрением и могла распознавать окружающие ее предметы, оперировать ими по заданной программе.
Роботы второго поколения, создание которых шло практически одновременно с совершенствованием и внедрением робототехнических устройств первого поколения, так же, как и они, имеют несколько названий: "очувствленные" роботы, адаптивные (приспосабливающиеся) и т. п. Отличительная их черта- действие в зависимости от окружающей обстановки: при изменении параметров объекта манипулирования (его углов ориентации, координат) и окружающей среды (скажем, конфигурации каких-либо препятствий на пути следования "руки") они могут скорректировать свои действия в соответствии с этими изменениями. Такая гибкость "поведения" роботов второго поколения достигается благодаря тому, что они "очувствлены", т. е. их система управления снабжена большим числом разнообразных сенсорных датчиков, как внешних (телевизионные, локационные, тактильные), так и внутренних (датчиков положения "рук" относительно корпуса робота, датчиков развиваемых манипулятором усилий и моментов и т. п.). Кроме того, главным звеном системы управления "очувствленного" робота служит ЭВМ, воспринимающая сигналы всех датчиков о внешней среде и состоянии самого манипулятора. На основании этих сигналов ЭВМ с помощью заранее заложенной в нее программы устанавливает закон управления исполнительным механизмом робота с учетом изменений окружающей обстановки. На рисунке 41 показан робот второго поколения, а на рисунке 42, а, б, в - различные варианты внешнего вида адаптивных систем управления.
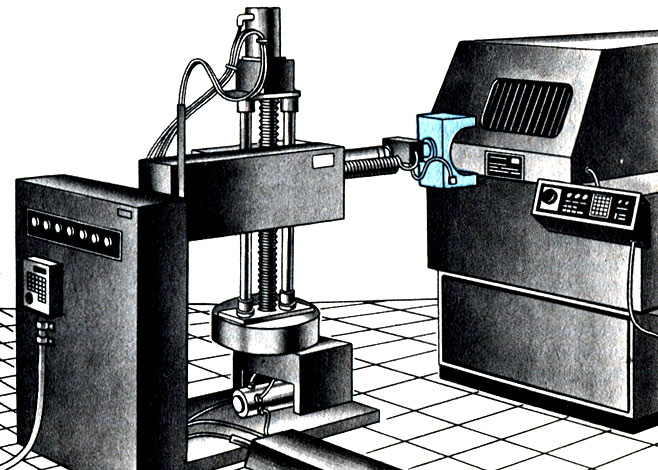
Рис. 41. 'Приспосабливающийся' к изменениям условий работы (адаптивный) робот; он снабжен связанными с ЭВМ датчиками и принадлежит к роботам второго поколения
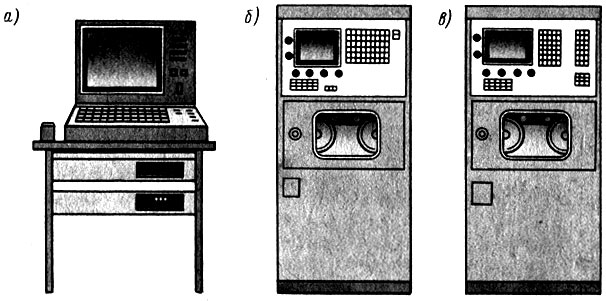
Рис. 42. Так выглядят системы управления 'очувствленными' роботами
Серийный выпуск роботов второго поколения для нужд промышленности начался на рубеже 70 - 80-х гг. Практическое применение они получили главным образом для сборки изделий (взятия с конвейера неориентированных деталей и постановки их в нужное место), дуговой сварки деталей, контроля качества продукции и выполнения других операций. А главное - будучи универсальным средством для осуществления манипуляционных действий, адаптивные роботы стали важным компонентом многих гибких (быстро перестраиваемых на выпуск новой продукции) автоматизированных производств.
Как известно, основой гибкого автоматизированного производства служат станки с числовым программным управлением (ЧПУ). Они обладают большой производительностью и легко переналаживаются путем смены программ работы. Однако эффективность их использования бывает подчас небольшой из-за неавтоматизированности вспомогательных операций: подачи к станку обрабатываемых деталей, транспортировки их к другому станку или к месту складирования и т. д. Выполнение этих операций роботами значительно повышает экономические показатели применения станков с ЧПУ. В случае же перехода таких станков на выпуск новой продукции "очувствленные" роботы тоже быстро перестраиваются на манипулирование новыми объектами, что в конечном счете и делает эффективным применение гибких автоматизированных производств.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'