Служебные обязанности системы управления "очувствленного" робота
Управление адаптивным роботом реализуется путем формирования связей типа "класс ситуаций - действие" в памяти ЭВМ. Как себе представить этот процесс? Чтобы разобраться в нем, уточним новые термины.
Под "ситуацией" понимается набор значений сигналов от датчиков, поступающих на выход сенсорной системы, а под "классом ситуаций" - множество условий, в которых может оказаться робот и которые требуют от него одного и того же действия. "Действие" же - это не просто одноразовое перемещение манипулятора, а целая программа его движения с целью выполнения определенной трудовой операции; она, как и у роботов первого поколения, заранее задается (здесь - вводится в память ЭВМ).
Рассмотрим подробнее, как справляется в этом случае система управления адаптивным роботом со своими "обязанностями".
В память обслуживающей робота ЭВМ закладывается столько программ движения манипулятора, сколько может возникнуть при его использовании "классов ситуаций" - не очень сильно отличающихся друг от друга условий работы; причем каждая программа соответствует своему "классу ситуаций". Пока ситуация (параметры среды и сигналы датчиков) меняется незначительно, так что условия работы манипулятора хотя и становятся несколько иными, но не выходят за границы данного их класса, робот действует по одной из программ - по той, которая соответствует этому классу условий. Как только от сенсорной системы поступят сигналы, отражающие сильное изменение "ситуации", работа манипулятора переходит в другой класс условий, что требует другого "действия" робота, и движение его манипулятора происходит по новой программе, которая в соответствии с новыми условиями извлекается из памяти ЭВМ.
Более наглядно это можно представить себе так. Обозначим параметры, характеризующие состояние внешней среды и самого робота, от которых зависит дальнейшее его поведение, буквами р1, р2, р3,…,рn. Различных наборов этих параметров может быть очень много (рис. 43), однако их можно объединить в конечное и обычно не очень большое число "классов ситуаций" I, II, ... N (значение N не превышает, как правило, нескольких десятков), а каждому "классу ситуаций" соответствует свое определенное действие (программа движения 1, 2, ... N). Таким образом, корректировка программы управления адаптивным роботом происходит не при всяком изменении обстановки (состояния робота или окружающей среды), а только тогда, когда эти изменения столь существенны, что приводят к переходу ситуации из одного класса в другой.
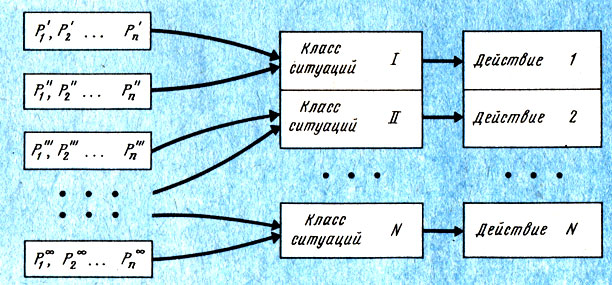
Рис. 43. Схема корректировки программы действий робота в зависимости от характера изменений, происходящих в условиях его работы
Вспоминая иерархическую организацию системы управления робота, мы можем заключить, что у роботов второго поколения в системе управления явно присутствует тактический уровень, причем в некоторых особо сложных конструкциях адаптивных роботов этот уровень приближается по классу решаемых задач к стратегическому.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'