Роботы третьего поколения
Усложнение современного промышленного оборудования и технологических процессов, которые обслуживают роботы, повышает требования к качеству их программного обеспечения, определяющего, собственно, адаптационные способности робототехнических устройств. Перед их разработчиками и программистами встали задачи создания все более сложных алгоритмов и более четких (сужающих границы класса) связей типа "класс ситуаций - действие". В попытках создать систему управления робота, которая для каждой конкретной "ситуации" (а не для обширного их класса) подбирала бы наиболее оптимальное "действие", родился (в конце 70-х гг.) новый тип роботов - роботы третьего поколения (их называют еще роботами с искусственным интеллектом, или "интеллектуальными" роботами). Они принципиально отличаются от своих предшественников - робототехнических систем второго поколения. Если в последних связи "класс ситуаций - действие" и сам характер "действия" (программа движения манипулятора) закладываются разработчиками при конструировании робота или формируются оператором в процессе его "обучения", то "интеллектуальные" роботы устанавливают все необходимые связи сами, т. е. у них должны быть представлены все уровни иерархической системы управления. На рисунке 45 показан, например, относительно простой "интеллектуальный" робот типа "глаз - рука", т. е. робот, имеющий систему технического зрения в виде телекамер, корректирующих движение манипулятора. Этот робот "умеет" собирать предметы по чертежу.
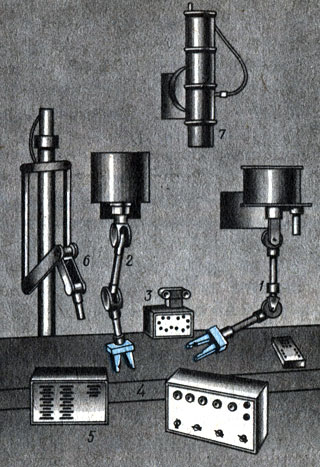
Рис. 45. Экспериментальный робот третьего поколения: 1 и 2 - манипуляторы со съемными 'очувствленными' схватами, 3 - ультразвуковой локатор, 4 - стол, снабженный датчиками,5 - речевое командное устройство,6 - рукоятка ручного управления,7 - телевизионная камера
Роботы третьего поколения существенно отличаются от своих предшественников. И не только гораздо более сложным алгоритмическим обеспечением, требующим более совершенной вычислительной техники, но и совсем другим уровнем сложности сенсорной системы. В общем случае "интеллектуальный" робот должен обладать способностью зрительно воспринимать окружающую обстановку, формировать модель внешней среды, анализировать и распознавать сходные ситуации и даже понимать язык и вести в устной форме диалог с человеком. Но и это еще не все. Принципиально важная особенность этих роботов - способность самообучаться в процессе решения поставленных человеком задач, что неограниченно расширяет их возможности. На рисунках 46 и 47 показаны роботы третьего поколения.
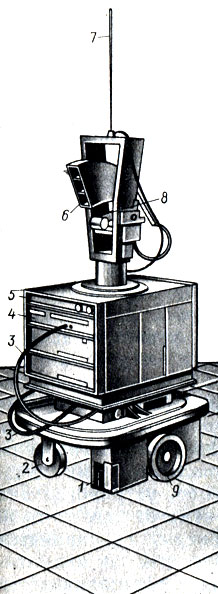
Рис. 46. Лабораторный подвижный робот третьего поколения: 1 - привод колеса, 9, 2 - опорные ролики, 3 - датчики контакта, 4 - устройство управления телевизионной камерой, 5 - система управления роботом, связанная с ЭВМ, 6 - оптический дальномер, 7 - антенна радиосвязи, 8 - подвижная телевизионная камера
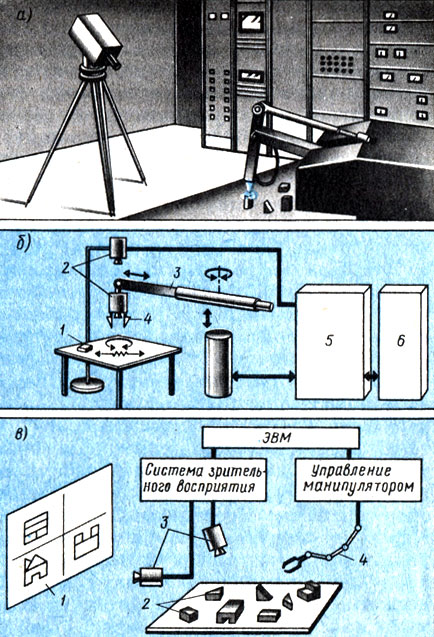
Рис. 47. Экспериментальный 'интеллектуальный' робот типа 'глаз - рука', предназначенный для сборки деталей по чертежу: а - общий вид робота, б - схема устройства (1 - объект, 2 - телекамеры, 3 - манипулятор, 4 - схват, 5 - блок управления, 6 - ЦВМ), в - схематическое изображение процесса работы этой робототехнической системы (1 - чертеж, 2 - объекты, 3 - телекамеры, 4 - манипулятор)
Пределов совершенствованию роботов третьего поколения практически нет: они могут выполнять самые разнообразные задачи во всех областях человеческой деятельности. Поэтому их появление породило радужные надежды на всеобщую роботизацию и соответственно полную автоматизацию не только промышленного производства, но и сферы обслуживания, быта, медицины и даже некоторых областей творческой деятельности человека: всерьез стала обсуждаться перспектива создания, например, робота-музыканта и робота-художника.
Однако даже самые первые, не очень "интеллектуальные" образцы таких устройств, предназначенные лишь для промышленности, оказались столь сложными и, следовательно, дорогостоящими, что прогнозы о вытеснении всех других автоматов роботами третьего поколения и об обусловленной этим революции в производстве постепенно сменились более осторожными оценками и предположениями. (Ведь создание и эксплуатация, скажем, робота-домохозяйки или робота-медицинской сестры обходятся дороже, чем содержание целого штата этих работников!)
Помимо высокой стоимости, есть еще одна сторона проблемы использования "умных" роботов: вследствие исключительной сложности системы их управления надежность этих робототехнических устройств оказывается недостаточно высокой. (Здесь проявляется общий "технический" закон: с усложнением техники ее надежность при прежнем качестве изготовления уменьшается.) Но, как мы уже говорили, высокая надежность роботов является необходимым условием успешного их внедрения. Поэтому в настоящее время господствует мнение о целесообразности использования робототехнических устройств всех трех поколений.
Тем не менее будущее, по-видимому, именно за поколением "интеллектуальных" роботов. Однако на пути к ним пока еще масса препятствий научного, технического и экономического характера, преодоление которых - увлекательное и важное дело. Принять участие в нем сможет любой из вас. И не обязательно в Качестве разработчика какой-либо модели "умного" робота. Процесс обслуживания роботов всех поколений во время их эксплуатации не менее интересен, так как требует высокой квалификации и практика подсказывает порой самые эффективные идеи и удачные технические решения.
Выбирая же сейчас тип промышленного робота, приходится учитывать соотношение между его ценой и функциональными возможностями, а также сложностью и стоимостью дополнительного к нему оборудования. Здесь следует обратить внимание на такой факт. Как показал опыт применения роботов, их внедрение успешно только тогда, когда они конструируются и используются вместе (в комплексе) со вспомогательным технологическим оборудованием, предназначенным для конкретного их вида. К такому оборудованию относятся, например, устройства для подачи роботу заготовок со склада или приема от него готовой продукции, различные бункера и контейнеры, где хранятся детали и откуда робот их может легко извлекать, так называемые приспособления-спутники, в которые устанавливается деталь, пока она, находясь в технологическом процессе, обслуживаемом роботом, "дожидается", когда последний ее возьмет в нужный момент. (Кстати, использование спутников гарантирует точную установку детали и сохранение ее ориентации во время технологического процесса, что позволяет избежать применения сложных сенсорных устройств, а иногда и обойтись роботом первого поколения там, где не будь приспособления-спутника, пришлось бы ставить адаптивного робота.) Целесообразность эксплуатации роботов в комплексе с дополнительными специализированными устройствами нашла отражение в появлении терминов "робототехнический комплекс" и "робототехническая система", под которыми понимается совокупность робота и созданного специально для него вспомогательного технологического оборудования. Поскольку современное роботостроение ориентировано на разработку и эксплуатацию именно таких совокупностей, а не отдельных роботов, то, говоря об использовании робототехнических устройств, мы будем употреблять слова "робот", "робототехническая система", "робототехнический комплекс" как синонимы.
И еще одно замечание. Роботы третьего поколения, существенно раздвинув границы применения робототехники и породив научно не обоснованные надежды на возможность полной замены ими людей во всех сферах деятельности, не всемогущи. К какому бы поколению ни относился робот, он остается все же только машиной и потому способен лишь к действиям, поддающимся точному описанию с помощью алгоритмов, программ и т. д. Как ни совершенствовать его, какие новые поколения ни создавать, но такие области человеческой деятельности, где нужны интуиция, творчество, эмоции, все равно не будут ему доступны и подвластны. Роботы, наделенные всеми человеческими способностями (своего рода искусственные люди, могущие думать, чувствовать и переживать, как человек), остаются теперь только на страницах фантастической литературы.
Более того, как вы могли заметить, говоря об "интеллектуальном" роботе, мы полагали, что его система управления работает без участия человека, который вмешивается только в случае сбоя или аварии. Так должно быть в идеале. Однако в действительности существует множество робототехнических устройств, в процессе управления которыми обязательно участвует человек-оператор, например, при исследованиях, проводимых в условиях агрессивных сред, т. е. там, где присутствие людей крайне нежелательно или вообще недопустимо (скажем, в зоне радиации), а обстановку, в которой придется действовать роботу, предвидеть невозможно. Следовательно, реальные "интеллектуальные" роботы не столь уж "сообразительны" и самостоятельны, чтобы можно было на них полностью положиться во всех случаях жизни.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'