Какого же типа роботы наилучшие?
Мы рассмотрели все возможные варианты формирования управляющих сигналов, поступающих на приводы манипулятора, и в зависимости от типа системы управления (степени ее автономности от человека-оператора) классифицировали роботы (см. схему 3) на биотехнические, интерактивные и автоматические.
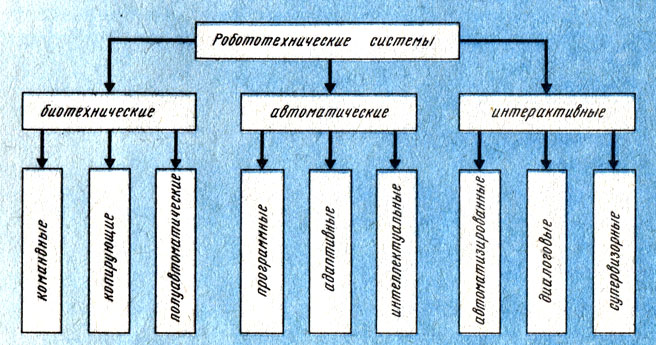
Схема 3
Но теперь возникают естественные вопросы: какие же из них наилучшие? Каким следует отдать предпочтение, выбирая их в качестве своих помощников?
Как из трех поколений автоматических робототехнических систем оказалось невозможно выделить лучшее,- каждое поколение хорошо для определенных конкретных условий, так и среди рассмотренных типов роботов нельзя однозначно назвать наиболее предпочтительный. Для роботов промышленного назначения более подходящ автоматический тип управления, для исследовательских и предназначенных для использования в экстремальных обстоятельствах - биотехнический, а для уникальных, действующих в сложной, но не неожиданной обстановке, новейших моделей роботов - интерактивный тип управляющей системы.
Таким образом, для того чтобы в каждом конкретном случае рационально выбрать нужный тип робота, необходимо четко представлять себе, в каких условиях он будет трудиться. Поэтому, продолжая рассказ о современном состоянии и проблемах робототехники, перейдем к описанию основных областей ее применения и конструктивных особенностей роботов различного назначения. Однако прежде чем начать следующий раздел, выясним, как влияет прогресс вычислительной техники на судьбу роботостроения.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'