Классификация роботов по степени участия в управлении ими оператора
Совершенно ясно, что в зависимости от назначения и сложности робота участие человека-оператора в процессе выработки управляющих сигналов, подаваемых на приводы манипулятора, должно быть различным. Чтобы лучше ориентироваться в мире роботов, познакомимся кратко с их классификацией по этому признаку.
Робототехнические системы, в которых управляющий сигнал вырабатывается без участия оператора, называют автоматическими. Именно эти системы мы имели в виду, когда говорили о делении роботов на три поколения. Их общая отличительная черта состоит в том, что оператор вмешивается в их работу только в случае аварии или если работа закончена, причем такое вмешательство происходит достаточно часто в робототехнических системах первого поколения, реже - второго поколения и минимально - в процессе функционирования роботов третьего поколения. (Собственно, дорогостоящие "интеллектуальные" роботы и создаются для того, чтобы они трудились максимально самостоятельно.)
Робототехнические комплексы, в которых оператор постоянно участвует в процессе выработки управляющих приводами манипулятора сигналов, называют биотехническими. Их в свою очередь разделяют на три типа: командные, копирующие и полуавтоматические.
В командных системах оператор с помощью простейших устройств управления - кнопок, тумблеров (рис. 48) воздействует отдельно на каждый привод манипулятора. Включая последовательно все приводы, он добивается нужной конфигурации траектории движения схвата. Очевидно, что управлять роботом таким способом тяжело (это требует большого напряжения, сосредоточенности и внимательности), при этом скорость выполнения операций оказывается минимальной, а утомляемость оператора высокой.
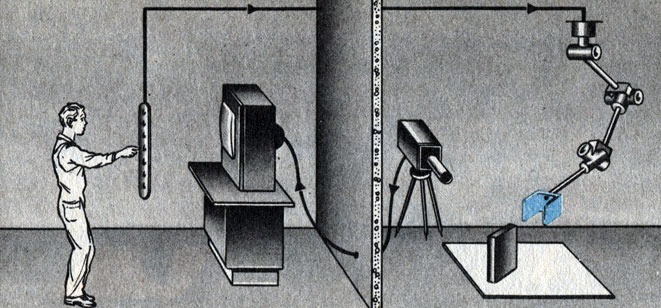
Рис. 48. Схема действия биотехнического робота с системой управления командного типа
Копирующие биотехнические системы управления (рис. 49) обладают более совершенной конструкцией, чем командные. В них оператор, воздействуя руками на копию манипулятора, заставляет ее двигаться нужным образом, а специальная следящая система, вырабатывая управляющие сигналы, приводит рабочий манипулятор в точно1 такое же по характеру движение. Чтобы манипулятор и его копия двигались идентично, они имеют одинаковые кинематические схемы, т. е. одинаковые совокупности элементов, тождественно соединенные между собой.
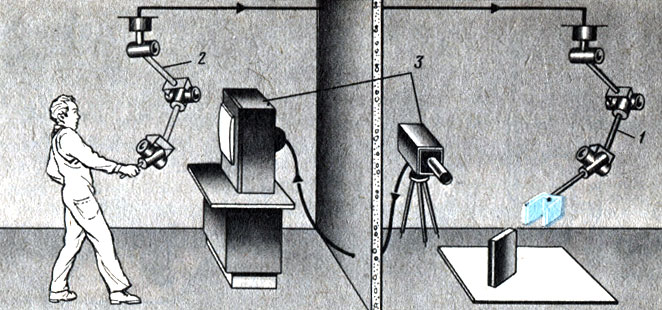
Рис. 49. Принцип действия копирующей системы управления биотехническим роботом: 1 - манипулятор, 2 - его копия, которой управляет оператор, 3 - система следящая за движением манипулятора и его копии
Копирующие системы управления непрерывно совершенствуются (их прообразами были те, что механическим способом обеспечивали аналогичность движения манипулятора, изображенного на рисунке 49, и его копии); сейчас уже сконструированы такие системы, в которых реализована так называемая "обратная связь по усилию": оператор, перемещая копию, ощущает, с какой силой рабочий манипулятор взаимодействует с окружающей средой, т. е. какое он испытывает сопротивление движению. Это важно для точности и надежности управления им. Дело в том, что когда человек сам выполняет какую-либо операцию, например поднимает и перемещает груз, то он, того не замечая, учитывает массу груза и бессознательно прилагает силу, пропорциональную ей, а открывая или закрывая дверь, люк, передвигая деталь, отвинчивая или завинчивая гайку и т. д., инстинктивно действует с силой, исключающей поломку или деформацию предметов, заклинивание или срыв резьбы с них и т. п. Выполняя подобные операции с помощью робота, оператор нуждается в информации об усилиях, развиваемых манипулятором, чтобы тоже избежать деформаций и порчи деталей, не снижая скорости проведения операций и повышая тем самым производительность труда и качество работ.
Достигается эффект обратной связи по усилию следующим образом. Датчики, установленные на рабочем манипуляторе и регистрирующие информацию о возникающих усилиях, передают электрические сигналы в систему управления, откуда поступают управляющие воздействия на двигатели, находящиеся в приводах манипулятора-копии. Эти двигатели создают в нем усилия, пропорциональные силам, действующим на рабочий манипулятор.
Будучи значительно совершеннее командных систем управления, копирующие системы нашли широкое применение в робототехнических комплексах, выполняющих ремонт и профилактическую проверку ядерных реакторов и других устройств, имеющих зону радиации (рис. 50).
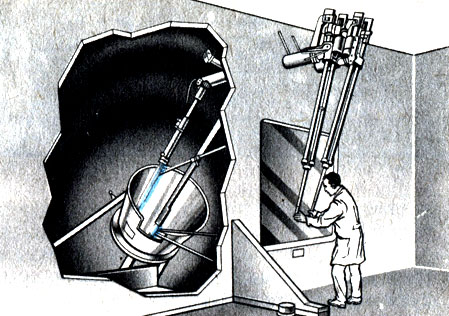
Рис. 50. Схематическое изображение работы в опасной зоне манипулятора, управляемого оператором из другого помещения с помощью копирующей системы
Полуавтоматические системы управления - наиболее совершенные из биотехнических систем. Их устройство обеспечивает оператору управление манипулятором с помощью рукоятки, имеющей несколько степеней подвижности (рис. 51). Эта рукоятка снабжена для удобства пользования ею пружинами, возвращающими ее в первоначальное положение, и датчиками, регистрирующими ее смещения в различных направлениях. На рисунке 52 показаны различные конструкции и виды крепления управляющих рукояток.
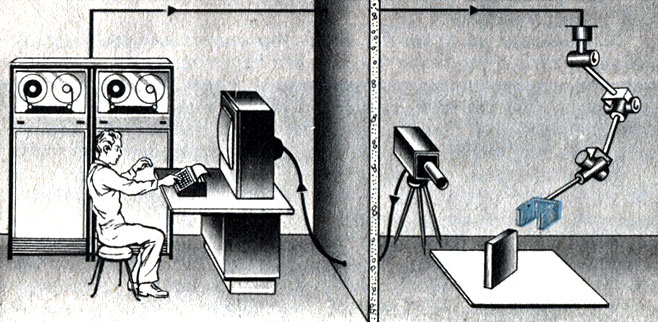
Рис. 51. Схема полуавтоматического управления биотехническим роботом: 1 - рукоятка, перемещение которой оператором вызывает соответствующие сигналы в системе управления манипулятором
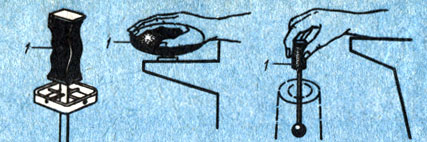
Рис. 52. Разнообразные конструкции управляющих рукояток
В конструкциях полуавтоматических систем управления предусматриваются различные варианты воздействия на манипулятор: Так, если оператор, нажимая на рукоятку, изменяет направление и скорость движения схвата, то говорят об управлении "по вектору скорости". В этом случае схват перемещается в пространстве со скоростью, пропорциональной смещению рукоятки, и в таком направлении, которое определяется направлением ее смещения. Если же, нажимая на рукоятку, оператор задает схвату манипулятора направление и значение развиваемой им силы, то говорят об управлении "по вектору силы". В этом случае схват или заменяющий его инструмент воздействует на окружающую среду (объект манипулирования) с такой силой, значение которой пропорционально смещению рукоятки, а направление определяется направлением этого смещения. И, наконец, когда оператор, передвигая рукоятку, изменяет направление и модуль перемещения схвата, говорят об управлении "по вектору перемещения". В последнем случае движение схвата в рабочей зоне манипулятора определяется изменением положения управляющей рукоятки так, что его перемещение пропорционально смещению рукоятки.
Воздействуя на рукоятку, оператор задает или скорость, или усилие, развиваемое схватом, или его перемещение в привычных для себя декартовых координатах, а приводы манипулятора должны в большинстве случаев осуществлять весьма сложные пространственные движения схвата, что достигается вращательным движением звеньев манипулятора относительно друг друга.
Таким образом, возникает задача пересчета заданного оператором в декартовой системе координат параметра (перемещения, скорости, силы) в управляющие воздействия на приводы всех степеней подвижности робота. Эту задачу выполняет устройство, называемое спецвычислителем. На его вход поступают сигналы от управляющей рукоятки, заданные в декартовой системе координат, а на выходе возникают сигналы-"команды" для каждого отдельного привода. Такой спецвычислитель- характерная часть полуавтоматической биотехнической системы управления роботом. Полуавтоматические системы управления, как наиболее удобные среди биотехнических систем с точки зрения оператора, широко используются в робототехнических комплексах, применяемых на орбитальных космических станциях, космических кораблях и в многоцелевых подводных аппаратах.
Преимущества как автоматических, так и биотехнических роботов сочетает в себе третий тип робототехнических систем -так называемые интерактивные роботы. Они также могут быть трех видов: автоматизированные, супервизорные и диалоговые.
В автоматизированных роботах автоматический и биотехнический режимы управления чередуются по усмотрению оператора в зависимости от условий функционирования робота и состояния окружающей среды. В супервизорных- общую стратегическую цель каждой команды задает оператор, а выполняет ее робот самостоятельно в автоматическом режиме. В диалоговых-робот самостоятельно выполняет поставленную перед ним задачу в автоматическом режиме, но если он "не понимает" чего-либо в окружающей обстановке или в условии задачи, то обращается к оператору за помощью. При этом на пульте оператора загорается определенная комбинация ламп или подается звуковой сигнал - звонок или звук сирены, а может высветиться на экране дисплея какой-то вопрос.
Современные робототехнические системы интерактивного типа (диалоговые - рис. 53) очень интересны: они представляют собой высшую форму взаимодействия робота с человеком-оператором (это совершенство взаимодействия и есть их отличительная черта). Если, скажем, робот автоматического типа в случае поломки, непредвиденных изменений внешних условий или других нарушений режима работы останавливается или совершает бесполезные движения, чего оператор может и не заметить, то интерактивный диалоговый робот сам привлечет внимание оператора к сбою своих движений При том он попытается определить их причину или степень изменения внешней среды и сообщит о результатах оператору. В том случае, если обращение робота к оператору вызвано "непониманием" поставленной задачи, то будет сообщено, какой именно ее фрагмент вызывает "затруднения". Все эти, на первый взгляд, фантастические способности интерактивного диалогового робота возможны благодаря наличию у него развитой сенсорной системы, сигналы от которой обрабатывает современная микроЭВМ или управляющая система на микропроцессорах. Особенность таких роботов - лишь специальное, довольно сложное алгоритмическое обеспечение, представляющее собой набор программ, реализующих диалог с человеком.
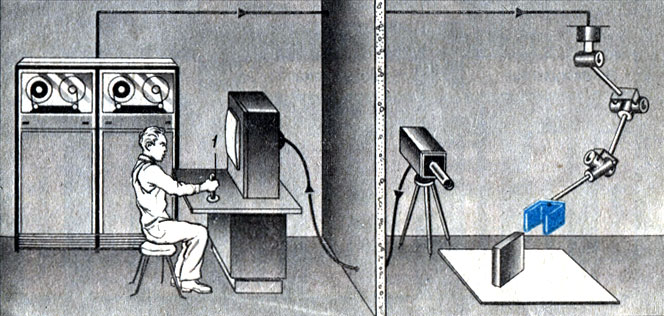
Рис 53. Схема диалогового управления интерактивным роботом- оператор 'сообщает' ему код нужных операций, а на дисплее могут высветиться сигналы-вопросы системы управления
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'