Роботы-сварщики
Большой "отряд" промышленных роботов составляют робототехнические устройства, выполняющие операции сварки (рис. 65). Они осуществляют как точечную сварку, так и сварку сплошным швом.
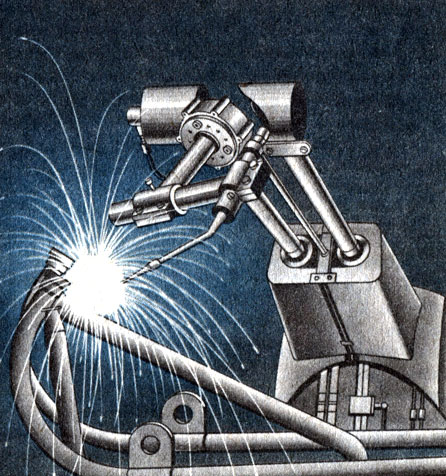
Рис. 65. Сварка осуществляется роботом
При точечной сварке место соединения двух металлических поверхностей помещается между электродами, через которые пропускается импульс тока. Под действием тепла, выделяющегося при прохождении электрического тока, металл в этом месте плавится. Затем образовавшийся расплав остывает и затвердевает, образуя прочное "точечное" крепление поверхностей. Этот вид сварки широко применяется в автомобильной промышленности. Робот, предназначенный для такого типа сварки, показан на рисунке 66.
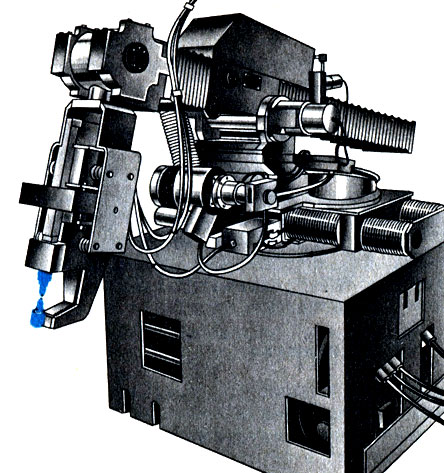
Рис. 66. Мощный робот, выполняющий точечную сварку деталей
Сварка сплошным швом осуществляется с помощью электрической дуги. В качестве одного из электродов, между которыми образуется дуга, используется проволока из специального сплава (сварочная проволока). Она при возникновении дуги между нею и другим электродом (им, как правило, служит соединяемая деталь) плавится. Проволока перемещается вдоль стыковочного соединения, куда попадает при этом расплав. Остывая, он и образует соединительный шов. Отечественный робот, выполняющий этот вид сварки, показан на рисунке 67.
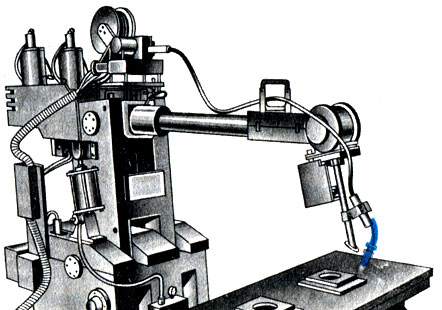
Рис. 67. Робот, осуществляющий сварку деталей сплошным швом
Ясно, что сварка, с одной стороны,- довольно неприятная и даже в какой-то мере опасная для человека операция: электрическая дуга излучает очень яркий свет (видели, как приходится сварщику предохранять от него глаза защитными очками или экраном?), в ней создается область высокой (порядка тысяч градусов) температуры, некоторые вещества, используемые в процессе сварки для упрочения шва и частично испаряющиеся при такой высокой температуре, вредны для здоровья. Все эти и подобные факторы делают заманчивой перспективу выполнения сварки роботами, а не людьми. Однако, с другой стороны, сварка, особенно сплошным швом, не простая операция для робота, поскольку требует контроля многих параметров: напряжения на электродах, скорости их перемещения вдоль шва, скорости подачи сварочной проволоки в зону дуги, точного следования электрода по шву и т. д.
В настоящее время роботы-сварщики широко применяются в первую очередь для точечной сварки в массовом производстве (например, при сварке кузовов автомобилей), поскольку эта операция "посильна" даже для тех из них, которые не имеют богатой сенсорной системы. Хотя и они должны "уметь" определять место сварки, "чувствовать" необходимое давление, прилагаемое к сварочным "клещам" (электродам, между которыми зажимаются соединяемые поверхности), "знать", когда нужно включить и выключить электрический ток, выбрать оптимальную длительность всех действий. Но это, как вы уже, наверное, можете заключить сами; доступно роботам с относительно простой системой управления.
Более совершенная система управления нужна роботам-сварщикам, выполняющим соединение деталей в виде сплошного шва. "Рука" такого робота, снабженная наконечником, в котором зажимается сварочная проволока, выталкиваемая из него постепенно (по мере расплавления в зоне дуги) специальным механизмом (его называют механизмом подачи сварочной проволоки), движется по непрерывной траектории. И очень важно иметь визуальную обратную связь, чтобы контролировать точность этого движения.
Благодаря применению для сварки промышленных роботов второго и третьего поколений удается решить целый комплекс проблем, существующих в этой области: автоматизировать установку и закрепление свариваемых деталей, осуществлять контроль параметров и качества сварки, выдерживать точность выполнения шва, а главное - удалить человека из зоны воздействия электрической дуги. Это в свою очередь позволило увеличить сварочный ток, применить более эффективные (но содержащие вредные для человека добавки) флюсы. Таким образом, в результате роботизации сварочного производства удается не только высвободить квалифицированных сварщиков с наиболее тяжелых участков работы (таких, как, скажем, соединение толстых фигурных деталей, сварка брони), но и значительно улучшить качество сварного шва. Последнему содействует и то, что робот-сварщик способен очень точно выдерживать стабильность параметров сварки: длину электрической дуги, скорость перемещения электродов, скорость подачи флюса и сварочной проволоки.
Использование роботов-сварщиков позволило коллективу Научно-исследовательского института технологии автомобильной промышленности разработать принципиально новую роботизированную линию сварки кузовов автомашин для Московского автомобильного завода им. Ленинского комсомола. Принципиальное отличие этой линии от предшествующих состоит в том, что она дает возможность сваривать на одном потоке несколько моделей кузовов, причем переход на другую модель происходит без остановки технологического процесса. Это достигается благодаря тому, что роботизированная линия позволяет, изменив программу управления конкретными роботами и заменив минимальное число вспомогательных приспособлений, сразу же начать выпуск новой модели или модификации кузова. Распоряжается этим процессом оператор. В определенный момент времени, когда на поток поступают детали для новой модели, он вводит в управляющее устройство роботов, выполняющих транспортные операции, новые координаты и соответствующие геометрические параметры кузовных деталей, а роботы-сварщики получают от него необходимую информацию о толщине металла, геометрии новых деталей и новые параметры сварки. Затем по его сигналу все роботы на линии начинают трудиться над изготовлением уже другой модели. Таким образом, роботизированная линия изготовления кузовов автомобилей может быть переведена на выпуск новой модели практически без остановки технологического процесса. А быстрая переналаживаемость оборудования служит главным преимуществом роботизированного производства, позволяющим ожидать повсеместное внедрение промышленных роботов, несмотря на их пока еще высокую стоимость. Робота-универсала, производящего контактную сварку кузова автомобиля, вы видите на рисунке 68.
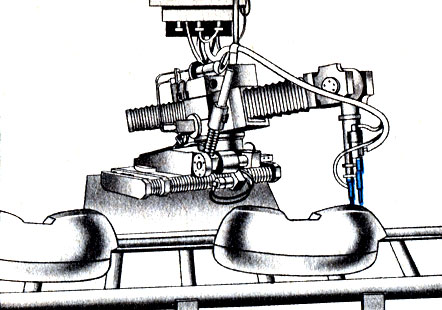
Рис. 68. Боковины кузова автомобиля сваривает контактным способом робот 'Универсал 60-02'
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'