Роботы-космонавты
Не меньше опасностей для человека, чем радиоактивные вещества, таит интенсивно осваиваемый в последнее время космос.
Со дня запуска первого искусственного спутника Земли (4 октября 1957 г.), от которого начался отсчет космической эры и который стал, хотя и недалекой, но все же историей, прошло чуть больше 30 лет. Все эти годы по все усложняющимся программам идут космические исследования. Они принесли человечеству огромные успехи. Вы о них хорошо знаете. Но вам известно, конечно, и то, что в процессе полета космонавты постоянно находятся под угрозой воздействия вредных для здоровья излучений, глубокого вакуума, холода и других факторов, требующих создания сложных и дорогих систем защиты и нормального жизнеобеспечения космонавтов. Однако можно только гадать о том, с какими неожиданностями и опасностями встретятся те из них, кто в будущем совершит более далекие космические путешествия, кто осуществит высадку на другие планеты. И, безусловно, в качестве первопроходцев новых космических трасс лучше было бы посылать не людей, а роботов. Это было бы выгодно и экономически: специалисты считают, что какой бы совершенной и дорогой системой управления ни обладал робот-космонавт, он все равно будет не столь дорогим, как создание систем защиты и жизнеобеспечения, удовлетворяющих повышенным (в этом случае) требованиям к их надежности.
Но пока робототехника еще не может обеспечить создание такой совершенной машины, которая могла бы заменить космонавта, хотя существуют многочисленные проекты подобных машин, в том числе проекты свободнолетающих космических роботов. Схематическое изображение одного из таких роботов приведено на рисунке 75. Предполагается, что этот свободнолетающий космический робот массой приблизительно 200 кг и поперечным размером примерно 1 м будет состоять из корпуса, в котором смонтированы следующие основные узлы: 1) двигательная установка, включающая несколько двигателей; одни из них (6) обеспечивают движение робота в направлении "вперед-назад", другие (3)- его правильную ориентацию в пространстве, а остальные (они не видны на рисунке) создают усилия в приводах манипуляторов по всем степеням подвижности; 2) система питания двигателей с топливными баками; 3) два смежных манипулятора / с устройством управления; 4) системы навигации, радиосвязи (последняя имеет видимые на рисунке радиоантенну 7 и радиолокатор 8) и телевизионная система, имеющая две неподвижные 2 (на рисунке видна одна из них, другая- на противоположной стороне корпуса) и одну подвижную 5 передающие камеры; 5) осветители 4.
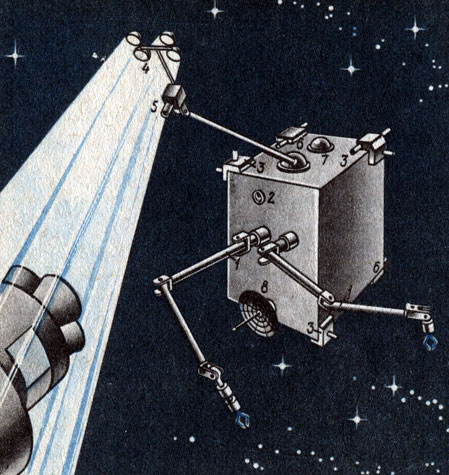
Рис. 75. Проект свободнолетающего космического робота: 1 - манипуляторы, 2 - неподвижная телекамера, 3 - двигатели ориентации, 4 - осветители, 5 - подвижная телекамера, 6 - двигатели поступательного движения, 7 - радиоантенна, 8 - радиолокатор
Свободно перемещающиеся роботы предназначаются для выполнения таких работ, как сборка на орбите космических аппаратов, разгрузка транспортных космических кораблей или погрузка на них каких-то предметов, спасательные работы, ремонт давно запущенных искусственных спутников или попавших в аварийную ситуацию, захват и исследование неизвестных объектов и т. д.
Чтобы у вас не создалось неверного представления, что применение роботов в космонавтике - лишь дело будущего, сразу же отметим: роботы уже трудятся в космосе, они непременные участники космических полетов. Существует даже специальная группа робототехнических устройств, которую называют "роботами космических кораблей". Они обслуживают современные космические аппараты. Рассмотрим, например, многоразовый космический корабль, схема которого показана на рисунке 76. На нем установлен "двурукий" робот; его манипуляторы 1 и 2 шарнирного типа имеют 6 степеней подвижности и длину около 15 м. Они могут перемещать объекты массой до 3 т и, как говорят, "медленно, но верно" ставить их на место - скорость схвата с грузом 0,03 м/с, погрешность позиционирования 5 мм. В исходном положении манипуляторы располагаются вдоль корабля и зажимаются в специальном крепежном механизме. На "кисти" каждого манипулятора укреплена телевизионная камера, а его захватное устройство можно менять. На корпусе космического корабля размещено несколько телевизионных камер и осветителей, в том числе подвижные камеры по краям грузового отсека, откуда робот извлекает и куда погружает транспортируемые кораблем грузы.
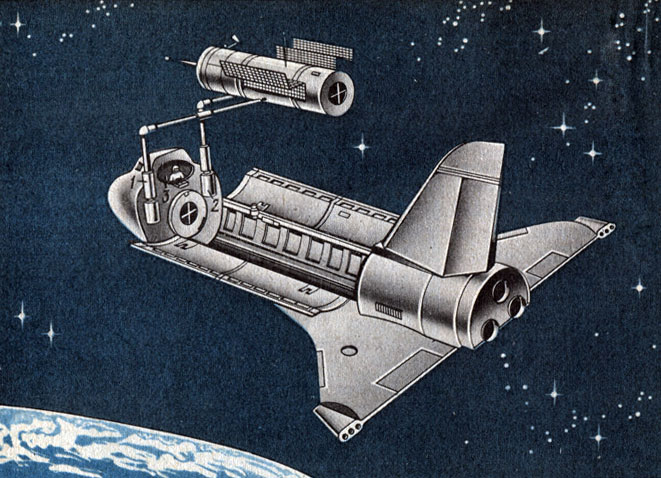
Рис. 76. Схема действия манипуляционного 'двурукого' робота, устанавливаемого на космическом корабле: 1 и 2 - 'руки' этого робота, 3 - отсек космического аппарата, где размещается система управления роботом
Система управления робота и пульт управления находятся в кабине 3 корабля. Предусмотрены ручной, полуавтоматический и автоматический режимы управления манипуляторами. Для ручного управления служат две рукоятки, каждая из которых имеет три степени подвижности; одна из них обеспечивает управление тремя поступательными, а другая - тремя угловыми степенями подвижности каждого манипулятора. В полуавтоматическом режиме осуществляется интерактивное управление, при котором космонавт-оператор выбирает из числа готовых программ нужные и последовательно вводит их в систему управления робота по мере выполнения конкретного задания. В полностью автоматическом режиме управление производится без участия космонавта-оператора, который осуществляет, однако, контроль и может вмешаться в любой момент времени, если это необходимо, в ход выполнения программы.
Этот робот способен выполнять следующие операции: вынимать грузы из отсека корабля и переносить их в сторону от него; манипулировать с объектами и пристыковывать их к другим аппаратам или раскрывать для самостоятельной работы на орбите антенные системы, солнечные батареи и т. п.; захватывать свободно летающие объекты и укладывать их в грузовой отсек; монтировать и демонтировать космические аппараты, находящиеся на околоземных орбитах, также ремонтировать их.
Роботы, подобные описанному, приобретают все большее значение для обслуживания ИСЗ. Дело в том, что в космическое пространство запускается и находится в нем большое количество спутников различного назначения. Основные две группы их составляют очень важные для жизни населения планеты спутники связи (ретрансляторы, позволяющие принимать радио- и телепередачи в местах, удаленных от радио- или телецентров) и научные, в том числе метеорологические (с их помощью проводятся самые разнообразные исследования Земли и околоземного пространства). Некоторые из них целесообразно было бы выводить на орбиту, поддерживать в рабочем состоянии, ремонтировать и модернизировать с помощью роботов, установленных на космических кораблях. Вот как, например, может производиться ремонт неисправных спутников.
Космонавт, управляющий кораблем, подводит его к вышедшему из строя спутнику на расстояние, допускающее его захват манипулятором. В это время космонавт-оператор, управляя манипулятором с помощью рукоятки в биотехническом режиме, захватывает спутник при помощи специального схвата и включает автоматический режим работы системы управления роботом. Манипулятор 1 опускает "пойманный" спутник 2 в ремонтный отсек корабля (рис. 77) и фиксирует его в механизме захвата 5, откуда "рука" 4 другого робота ("переносчика") транспортирует его к станции "сборки-разборки" 5. Далее космонавт-оператор опять же с помощью манипуляторов обнаруживает причину неисправности и устраняет ее, используя диалоговый режим управления роботом. После окончания ремонта спутник перемещается в обратной последовательности и доставляется манипулятором на прежнее место, а в ремонтный отсек космического корабля опускается второй спутник, нуждающийся в ликвидации неисправностей.
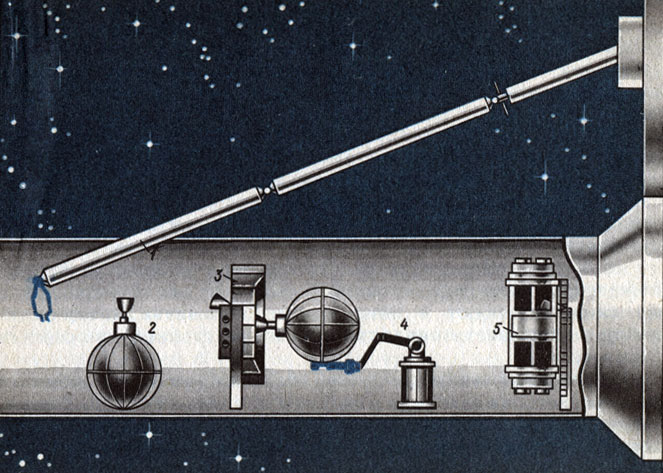
Рис. 77. Обслуживание роботами ремонтного отсека многоразового космического корабля: 1 - дистационный манипулятор, захватывающий на орбите ИСЗ, 2 - неисправный спутник, опущенный этим манипулятором в ремонтный отсек, 3 - механизм крепления спутника, 4 - "рука" робота-переносчика, 5 - ремонтная станция
Конечно, описанная робототехническая система уникальна, и стоимость ее огромна, тем не менее она служит наглядным! подтверждением широчайших возможностей роботов третьего поколения, оснащенных интерактивной системой управления.
Другим примером успешного использования робототехники в космосе являются межпланетные станции "Венера" и всемирно известный "Луноход" - символ выдающихся достижений советской науки в исследовании космического пространства. И хотя эти аппараты - не чисто робототехнические системы (в них присутствует огромное число уникальных по сложности устройств, не имеющих отношения к робототехнике и не встречающихся, пожалуй, в обычной, "земной" технике), они неопровержимо свидетельствуют о том, что использование космических роботов открывает принципиально новую страницу в освоении космоса.
Нельзя не упомянуть и о такой области применения роботов в космосе, которая возникла в результате проведения космических экспериментов по изучению того, как протекают некоторые процессы в условиях космоса (особенно важны в силу их продолжительности и тщательности такого рода эксперименты, осуществленные на орбитальных космических станциях). Естественно было бы ожидать, что необычные по сравнению с "земными" условия на космической орбите (прежде всего отсутствие силы тяжести) должны влиять на свойства получаемых в космосе материалов, на качество и характер обработки изделий и пр. Многочисленные эксперименты подтвердили это. Оказалось, что в условиях космоса можно получать, например, исключительно чистые вещества и однородные сплавы; совершенно новые материалы; практически идеальные кристаллические структуры; выращивать большие правильные кристаллы - такие, какие на Земле получить не удается. Кроме того, в космосе достигается лучшее, чем на Земле, качество литья, ковки, прессования и некоторых других промышленных процессов. Таким образом, космос предоставляет человечеству уникальные условия для развития космической промышленности, для которой главной "рабочей силой" могут быть, конечно же, роботы. А пока они используются для проведения все более сложных экспериментов по отработке компонентов будущих космических технологий.
Космос - безбрежен, в его исследовании сделаны лишь первые шаги, но и они потребовали применения робототехнических устройств. Несомненно, что дальнейшее его освоение, последовательное раскрытие "небесных" тайн немыслимы без автономных самоуправляемых машин - "умных" и "трудоспособных" роботов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'