Подводные роботы
Не только ли космос осваивает в наши дни человек? Отнюдь нет. И на Земле есть еще обширные необжитые людьми пространства. Сейчас идет, например, интенсивное освоение Мирового океана. Ведь его огромные просторы, занимающие свыше 70%| поверхности земного шара, до сих пор таят в своих глубинах почти столь же много загадок природы, как и космос. (Слово "почти" должно навести на мысль, что сравнение не совсем правомерно, так как космос не имеет границ, а океан "заключен" во вполне определенный объем - известны и протяженность береговых линий и средняя глубина Мирового океана.) И вот что важно: по данным проведенных к настоящему времени исследований недра Земли под океаном и сам океан представляют собой кладовую несметных богатств: и рыбы, и морских животных, и ценных водорослей, и полезных ископаемых, и многих других ресурсов. Из оценок запасов, например, марганца и железа следует, что только в Тихом океане их по крайней мере в 5 раз больше, чем на всех материках. Под морским дном хранятся колоссальные залежи угля, нефти, меди, молибдена, цинка; имеются россыпи тяжелых металлов. Существует даже прогноз геологов, согласно которому под дном океана между Южной Африкой и Бразилией залегает алмазная жила, многократно превосходящая все запасы этого редкого и ценного вещества на суше.
Между тем непосредственно человеку (ныряльщикам, аквалангистам, водолазам) доступна лишь малая часть шельфа - узкая прибрежная полоса, где глубина не превышает 200 м. Вся же остальная часть океана, т. е. прилегающая к материковым склонам, где глубина от 200 до 2 тыс. м, и основная (так называемое ложе), где глубина 2-6 тыс. м (в отдельных впадинах и свыше 10 тыс. м), может быть исследована и освоена только с помощью подводных аппаратов, защищающих людей от колоссального давления воды. (Оцените сами, какое примерно давление "ожидает" человека на "средней" глубине, скажем, порядка 3 тыс. м.)
Для исследований океана созданы в наше время самые разнообразные подводные аппараты - от батисфер и батискафов до специальных подводных лодок, этих современных "Наутилусов". И если только какой-либо из подобных аппаратов предназначается не просто для наблюдений, а еще и для выполнения определенных практических действий, например, для взятия со дна. образцов пород, крепления ко дну датчиков, опознавательных знаков и т. п., то ему обязательно понадобится "рука": с ее помощью проще всего сделать такую работу, не прибегая ни к каким хитроумным приспособлениям. А это и значит, что ему нужен робот (рис. 78). Совершенно ясно, что в случае добычи полезных ископаемых со дна океана без роботов обойтись вообще нельзя.
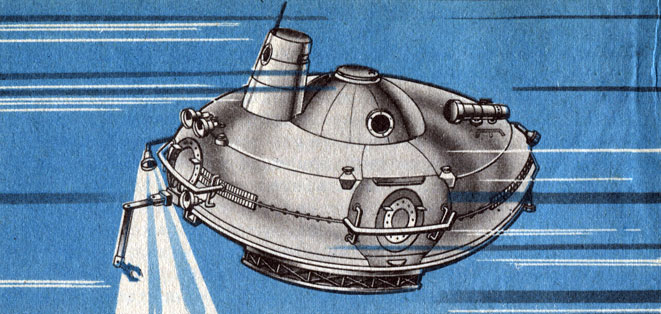
Рис. 78. Подводный аппарат, снабженный манипулятором
Сейчас прибрежная часть морей освоена уже промышленно: здесь добывается большое количество нефти и других минеральных ресурсов. И следует сказать, что применение в этих целях роботов, особенно на стадии поиска полезных ископаемых, началось значительно раньше, чем в космосе, и в настоящее время экспериментальные разработки уступили место систематическому целенаправленному использованию подводных робототехнических устройств. Любопытно, что хронологически первые подводные роботы старше даже промышленных. Целесообразность их создания и эксплуатации была очевидна всем: стоимость систем, обеспечивающих возможность пребывания человека на глубине, огромна и превосходит стоимость самых совершенных роботов; кроме того, на глубине более 300 м выполнение . любых сложных работ, например монтажных, человеком-водолазом практически невозможно.
Какие же конкретно работы "поручаются" подводным роботам?
Из сказанного выше вы могли заметить, что освоение океана предполагает решение двух основных задач: изучение его и извлечение из него ресурсов. Соответственно этим задачам главным образом и конструируются робототехнические устройства: для разведки глубин океана создаются роботы-наблюдатели, для выполнения на больших глубинах нужных операций с материальными объектами роботы - специалисты в тех или иных областях подводной индустрии. Среди последних - монтажники, сварщики, ремонтники подводного оборудования и др. Но этими задачами не ограничивается применение подводных роботов. Существует множество других видов работ под водой, при проведении которых наиболее эффективной альтернативой человеку-водолазу является робот. Это прокладка коммуникаций (кабелей, трубопроводов) по дну моря, подъем затонувших кораблей, самолетов, ремонт подводной части портовых сооружений, заделка пробоин у судов, образовавшихся ниже ватерлинии, и т. п.
В отношении подводных роботов может возникнуть такой недоуменный вопрос: а, собственно, как робот достигает дна океана? Когда речь шла о космических роботах, этот вопрос не возникал: подразумевалось, что "транспортом" для них служит космический корабль. Подобно космическим роботам, подводные роботы доставляются обычно к месту назначения морскими судами и спускаются с них под воду, где в зависимости от назначения они могут плавать или передвигаться по твердой опоре (по грунту, борту ремонтируемого корабля и т. д.). Как правило, подводные роботы связаны с кораблем тросом-кабелем, но бывают и автономные устройства, действующие под водой самостоятельно. "Привязной" робот состоит из двух частей: функционирующей подводной части и управляющей надводной части, размещаемой на корабле. По соединяющему эти части тросу-кабелю осуществляется энергопитание "руки" робота, двусторонняя связь между нею и "мозгом" (системой управления), а также спуск под воду и подъем манипулятора робота на поверхность.
Особенности среды, в которой приходится действовать подводным робототехническим устройствам (ее большая оптическая плотность по сравнению с воздухом, замутненность), осложняют получение информации с помощью систем технического зрения. Поэтому эти устройства снабжаются еще локационными средствами обнаружения предметов, прежде всего - ультразвуковыми. В подавляющем большинстве существующих подводных аппаратов, снабженных манипуляторами, используется ручное или автоматизированное управление "рукой" непосредственно с борта аппарата, если он обитаем, или дистанционно с надводного корабля.
Универсальные роботы-наблюдатели применяются для обследования дна и затонувших на больших глубинах предметов. Обычно они имеют богатую сенсорную систему: кроме подводной телекамеры, на них устанавливают локаторы, приборы инфракрасного видения, тактильные датчики, магнитометры и др. Управляют ими обычно в биотехническом режиме. Манипуляторы этих роботов имеют, как правило, гидравлические приводы, что позволяет им развивать большую мощность, а это в свою очередь дает возможность использовать их практически для любых подводных работ. Типичным примером таких робототехнических устройств служат созданные у нас подводные роботы серии "Манта", сохраняющие "работоспособность" при гидростатическом давлении до 4*107 Па (400 ат). Один из первых роботов этой серии показан на рисунке 79. В состав его системы управления входит бортовой вычислитель на базе мини-ЭВМ. Благодаря этому робот может автономно выполнять следующие "приказы" оператора в супервизорном режиме управления:
взять показанный оператором на телеэкране объект,
перенести его ближе к телекамере или положить в любую указанную на телеэкране точку пространства,
искать предмет вслепую (на ощупь) в заданном квадрате (если вода очень замутнена или видимость потеряна из-за других причин); встречающиеся при этом на пути манипулятора препятствия робот "обходит" автоматически.
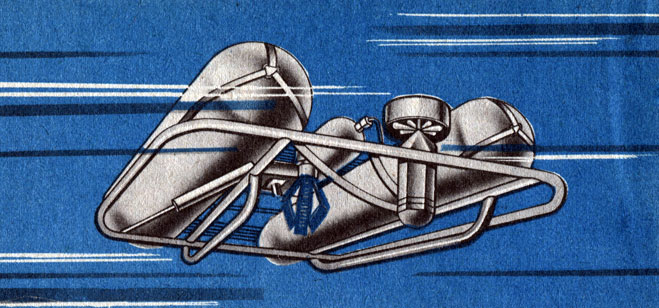
Рис. 79. Универсальный (необитаемый) подводный робот
Среди специализированных подводных робототехнических систем наиболее многочисленными являются роботы для добычи полезных ископаемых, особенно нефти. Будучи погруженными в море с плавучей буровой платформы, они проводят на дне все необходимые монтажные операции, начиная от установки бурового оборудования и кончая подсоединением трубопровода. Их гидравлические манипуляторы обладают большой мощностью, а система управления чаще всего бывает интерактивного типа - автоматизированная. Несложные монтажные операции выполняются в автоматическом режиме, а в остальных ситуациях роботом управляет при помощи рукоятки, находящейся на поверхности, оператор.
Следующий по распространенности тип подводных роботов - роботы, предназначенные для прокладки на дне коммуникаций: кабелей, газо- и нефтепроводов. Они мало отличаются от роботов предыдущей группы, тоже имеют мощные гидравлические манипуляторы, позволяющие использовать их как на глубинах, недоступных или опасных для человека, так и на мелководье для выполнения монтажных операций, требующих силы и мощности, которыми человек не обладает. Они могут быть как плавающими, так и перемещающимися по твердой поверхности. Примером подводных роботов, передвигающихся по дну, может служить робот на гусеничном ходу (рис. 80), управление которым и снабжение электропитанием осуществляют по кабелю длиной до 8 км.
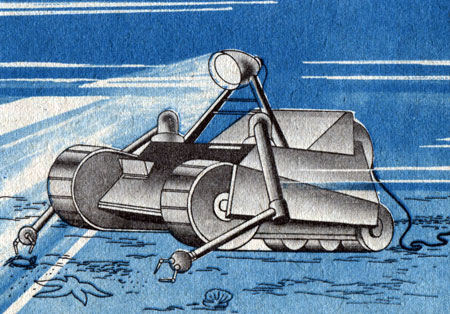
Рис. 80. Робот, перемещающийся по дну с помощью гусениц
Не менее важные работы выполняют робототехнические устройства, используемые для поднятия затонувших кораблей. Делают это автоматические системы всех трех поколений - биотехнические и интерактивные роботы. Простейшие из них прикрепляют к указанному оператором месту корпуса или какой-то конструкции затонувшего корабля надувные понтоны и расправляют шланги для накачивания воздуха. Более совершенные устройства, в частности второго и третьего поколения, действующие в интерактивном режиме, не только закрепляют понтоны на лежащем на дне судне, но и подыскивают сами подходящие для этого части корабля, проверяют их прочность, удаляют те, которые мешают подъему судна, освобождают корабль, долго пролежавший на дне, от ила и наносов грунта.
Одна из разновидностей таких роботов используется для подъема когда-то затонувшего оружия: торпед, ракет, мин. Очевидно, что для водолаза эта операция опасна - риск для жизни очень велик, поскольку проржавевшие за долгие годы пребывания в морской воде механизмы могут взорвать их смертоносную "начинку" при любой попытке сдвинуть подобный "предмет" с места. В то же время уничтожить его на дне, там, где он лежит, можно не всегда; иногда мешает это сделать, например, близость портовых сооружений. Выручает в этом случае робот-подводник: его железные "руки" - тот инструмент, который позволяет справиться с задачей, не подвергая прямой опасности людей. Эти же роботы применяются для обнаружения и подъема на поверхность потерпевших аварию и затонувших в наши дни самолетов, кораблей, подводных лодок и др.
Ныне разрабатываются и конструируются и другие виды подводных роботов, предназначаемые для выполнения самых разнообразных, подчас удивительных работ. Например, в Англии создан робот РМ-3, у которого манипулятор "держит" вращающуюся проволочную щетку. С ее помощью робот очищает днище судна и его корпус ниже ватерлинии от прикрепившихся к ним морских животных и растений, которые, образуя своеобразную бугристую корку, заметно снижают скорость судна. Этот робот может производить очистку как в сухом доке, так и под водой. Он снабжен тремя "лапами" с электромагнитами, которые позволяют ему, подобно мухе, ползти даже по вертикальной поверхности. Если очищаемая поверхность сделана из немагнитного материала, электромагниты легко заменяются на присоски. В зависимости от сложности операций управляет роботом ЭВМ или человек-оператор, причем управляющие сигналы передаются исполнительному механизму (манипулятору) по кабелюсветоводу, изготовленному из оптического волокна. За час робот очищает около 300 м2 поверхности.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'