Отечественное роботостроение и новые "профессии" роботов
Здесь уместно отметить, что советские ученые и инженеры вносят большой вклад в развитие робототехники. В разработке проблем создания промышленных роботов участвуют 50 научно-исследовательских и конструкторских организаций разных министерств и ведомств; в Академии наук СССР функционирует научный совет "Роботы и робототехнические системы". Ныне в СССР выпускаются и эксплуатируются такие универсальные промышленные роботы, как "Циклон" (рис. 84), "Универсал" (рис. 85), "Спрут" (рис. 86) и др.; разработано свыше 200 моделей и модификаций роботов, обладающих улучшенными характеристиками. Сравнение их с зарубежными образцами показывает, что они не уступают последним ни по конструкции, ни по кинематическим параметрам. В них аккумулируются многие достижения современной науки. Вот один лишь пример.
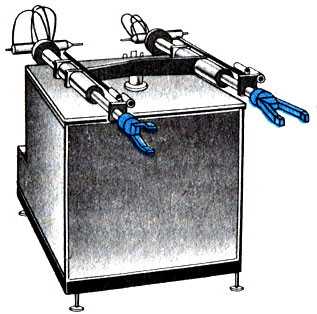
Рис. 84. Робот 'Циклон-36'
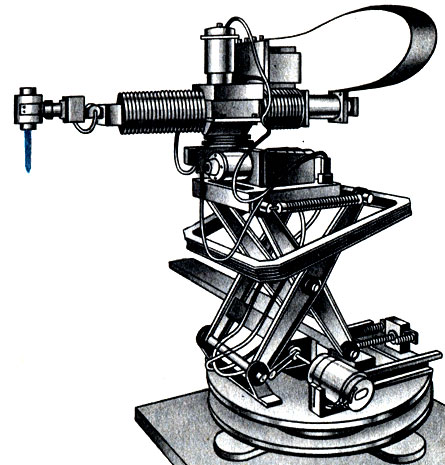
Рис. 85. Робот 'Универсал 5-03'
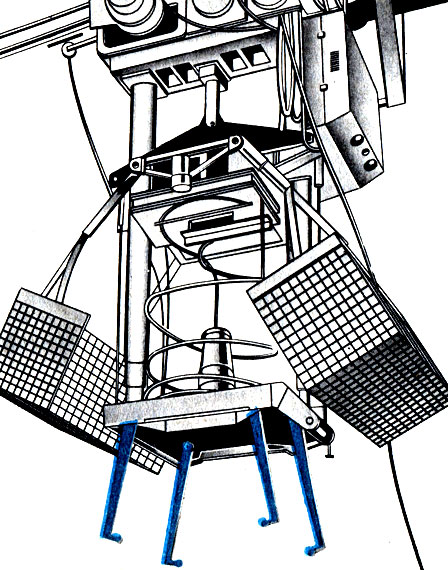
Рис. 86. Общий вид робота 'Спрут-1'
В Московском институте электронного машиностроения спроектирован транспортный робот с "инстинктом самосохранения". Перемещаясь по незнакомой местности с препятствиями, он "оглядывает" ее лазерным "глазом", "обдумывает" увиденное, выбирает оптимальный маршрут движения к заданной цели, а по пути к ней преодолевает только те препятствия, которые ему "по силам", остальные - для него непреодолимые - обходит.
Робототехнические исследования, опирающиеся на достижения большого числа наук - от математики и электроники до бионики и физиологии, в свою очередь стимулируют развитие многих из них. Крупнейший теоретик в области машин и механизмов академик И. А. Артоболевский говорил по этому поводу: "... научные проблемы робототехники как бы аккумулируют в себе главные направления теории машин и механизмов... Можно перечислить одну за другой все важнейшие проблемы робототехники и каждый раз при этом убеждаться, насколько плодотворно могут наши специалисты продолжать работать в области робототехники и насколько интенсивно робототехника оплодотворяет нашу науку..." Сказанное в большой мере относится и к другим областям научного знания, служащим компонентами робототехники.
Несомненно, что усовершенствование робототехнических устройств и вместе с тем их удешевление сильно раздвинут границы применения роботов, а главное - упрочат уже завоеванные ими позиции. Ведь из тех возможных для современного робота "профессий", о которых шла речь в предыдущем разделе, по-настоящему освоенными можно считать лишь некоторые: большинство действующих у нас в стране сейчас роботов "прописано" в заготовительных и штамповочных производствах, механических цехах. Однако поставлена задача резко расширить сферы внедрения робототехники, сосредоточить усилия на ее использовании в таких отраслях, как машиностроение, горнодобывающая промышленность, металлургия, сельское хозяйство, строительство, транспорт, легкая и пищевая промышленность. Некоторые из будущих профессий робота приобретают черты реальности уже сегодня. Приведем несколько примеров.
В одном из московских ателье появился электронный "закройщик" - первый робототехнический комплекс для пошива одежды. Он разработан сотрудниками Института проблем передачи информации АН СССР, которые предусмотрели выполнение им разных операций - от измерения всех необходимых размеров фигуры заказчика до раскроя ткани. С учетом заказанной модели костюма или платья, оптимальных вариантов использования ткани, других запрограммированных параметров комплекс выдает наилучший вариант выкройки, но пока... исполненной на бумаге. В дальнейшем к этому комплексу предполагается подключить раскроечный автомат, тогда он будет выдавать не бумажный крой, а из ткани, т. е. полностью готовый к шитью.
Существуют проекты роботов для текстильных предприятий, где им вменяется в "обязанность" следить за работой ткацких станков, устранять обрывы нитей, окрашивать ткани, проверять качество продукции, упаковывать ее и подготавливать к отправке заказчику.
Произошедший в последние годы прогресс в электронике и развитие электронной промышленности породили проблему создания роботов для вакуумной технологии. Дело в том, что изготовление нужных для современной электроники интегральных схем, полупроводниковых приборов, особо чистых материалов возможно только в условиях вакуума. Но работать в вакуумной камере человек не может, следовательно, за него это должны делать машины. Роботы, которым могут быть "доверены" сложные технологические операции по сборке микросхем или выращиванию бездефектных кристаллов в вакуумных камерах, должны отличаться от своих собратьев многими довольно трудно реализуемыми на практике качествами: например, быть долговечными, необыкновенно точными (они не могут ошибаться даже на доли микрометра!), "миниатюрными".
В число перспективных областей "вторжения" роботов входит и строительство. Многочисленные стройки страны нуждаются в новой технике для механизации и автоматизации работ, ведь пока на них используются в основном простые механизмы и приспособления, электрифицированный инструмент, в лучшем случае электомеханические манипуляторы и подъемно-Транспортные средства. Добиться без робототехники резкого повышения эффективности возведения строительных объектов уже трудно. И в научно-производственном объединении "ВНИИстройдормаш" был открыт недавно первый в отрасли отдел по разработке и внедрению строительных роботов. Здесь ученые и инженеры стараются реализовать в конструкциях робототехнических устройств особые требования, предъявляемые к машинам, предназначаемым для стройплощадок, например, повышенную надежность и защищенность от капризов погоды при работе на открытых участках строительства. К тому же робот-строитель должен быть мощным: ему придется поднимать тяжелые грузы, переносить их, устанавливать в нужном месте. А как его снабжать электроэнергией (дом-то только возводится)? Как оградить его при движении от опасности падения со строительной площадки? Ясно, что обеспечить для строительного робота электропитание и организовать для него безопасные маршруты движения гораздо сложнее, чем для промышленного робота. Словом, новая для робота "специальность" требует от его создателей большой изобретательности, новых конструктивных решений.
По мнению специалистов, уже в недалеком будущем робототехнические устройства должны играть видную роль в деятельности пожарных и спасательных служб. Именно роботы могут лучше всех действовать в опасных условиях: тушить пожар, ликвидировать утечку ядовитых веществ, ремонтировать оборудование, выход которого из строя грозит людям бедствиями, выносить пострадавших при аварии в безопасную зону и т. д. Причем делать это смогут не только "земные", но и космические роботы, например, такого типа, как изображенный схематически на рисунке 87. Этот робот, проект которого предложен для монтажных работ в космосе, может передвигаться на своих "ногах" по любой поверхности, даже вертикальной стене. Два его манипулятора должны удерживать нужные предметы, а один - выполнять предусмотренные действия.
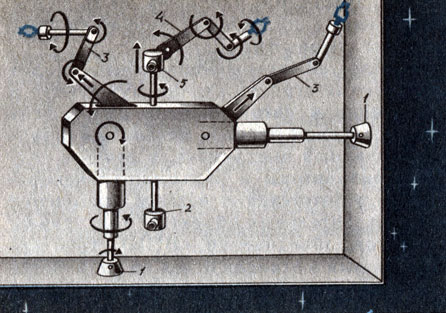
Рис. 87. Монтажный робот для крупных космических станций (проект):1 - "ноги", 2 - система слежения за их положением, 3-манипуляторы-"руки", предназначенные для удержания предметов, 4 - манипулятор, выполняющий монтажные работы, 5 - система наблюдения за действиями "рук" робота.
О космических роботах нужно сказать особо. Можно предполагать, что когда-нибудь в будущем встанет на повестку дня задача исследования дальнего космоса и далеких планет. Но вряд ли можно рассчитывать на непосредственное участие человека в таких космических экспедициях, требующих жизни даже не одного поколения людей. Предвидя это и то, что и на промежуточных стадиях освоения космоса (при изучении более близких объектов) нужны самые разнообразные робототехнические устройства, можно говорить о чрезвычайно широком "поле деятельности" для космических роботов, а значит, и о большой, увлекательной, перспективной не только сейчас, но и на многие годы вперед работе по созданию и испытанию "умных" космических машин: как роботов-"тружеников", выполняющих конкретные космические дела, так и роботов - исследователей космических просторов.
Конечно, заглянуть в будущее "роботизированной" космонавтики интересно, но для нас, землян, исключительно важно не упустить из виду перспективы развития промышленной робототехники, с которыми непосредственно связан научно-технический прогресс в нашем народном хозяйстве. Вы не забыли, может быть, что роботизация различных отраслей промышленности идет сейчас от использования отдельных групп роботов к созданию на их основе в сочетании с другими средствами автоматизации гибких автоматизированных производств (ГАП). Главной вехой на этом пути явилась реализация идеи получения легко переналаживаемого на выпуск новой продукции комплекса машин: такой комплекс стал комплектоваться из универсального автомата (станка с ЧПУ) и обслуживающих его роботов. Этот комплекс получил название гибкого обрабатывающего модуля, или гибкого обрабатывающего центра, так как он относительно автономен - может сам доводить обрабатываемую деталь до готовности и в то же время легко перестраиваться на обработку новых деталей. Процесс автоматизации производства охватывает следующие стадии: 1) создание гибких обрабатывающих модулей - автоматических участков производства, 2) объединение этих модулей в гибкую автоматизированную технологическую линию (рис. 88), иногда завершающееся возникновением "цехов-автоматов", и 3) синтез всех таких модулей и линий в единую систему - гибкое автоматизированное производство, управляемое иерархией ЭВМ и воплощающее идею создания безлюдного "завода-автомата".
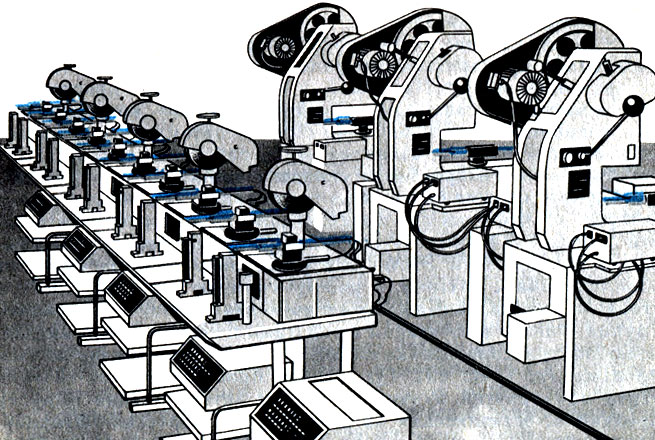
Рис. 88. Роботизированная линия, производящая детали для микросхем
Обрабатывающие центры действуют сегодня на многих промышленных предприятиях; не редкость сейчас и гибкие автоматизированные линии. Например, в новом филиале прославленного московского завода "Красный пролетарий", который оснащен современной техникой и по степени автоматизации вышел на передовые рубежи, взаимосвязанно работают станки с ЧПУ, роботы, автоматизированные склады и транспортные средства, ЭВМ, управляющие большинством операций. В нем есть цеха, в которых практически нет людей,- даже транспортировка деталей происходит автоматически: с помощью тележек, перемещающихся по командам ЭВМ. Они расторопно передвигаются от одного станка к другому, а роботы снимают с них заготовки и ставят на станки, снимая затем с последних готовую продукцию. Группа станков в сочетании с роботами и системой автоматизированной транспортировки образует гибкое автоматизированное производство (рис. 89). Тут хорошо просматривается главная черта предприятий будущего: полная автоматизация выпуска продукции, оставляющая на долю людей творческие функции: планирование производства, составление программ его работы, контроль за состоянием техники, переналадку ее на выпуск новой продукции и т. п. Именно с такого рода предприятиями, в которых должны действовать гибкие автоматизированные системы оборудования, связывают специалисты надежды на значительный рост эффективности нашего народного хозяйства. И роботы - непременная их часть.
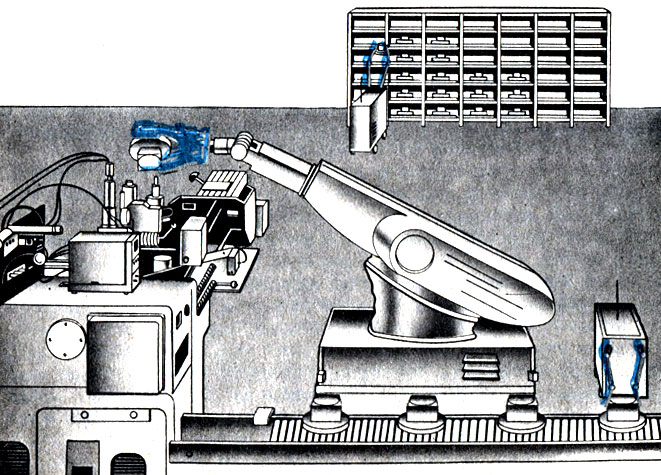
Рис. 89. Общий вид оборудования, входящего в гибкое автоматизированное производство
Пожалуй, все сказанное о дальнейшей "судьбе" робототехники уже дает достаточно верное представление о ней, как о такой отрасли науки и техники, вершина развития которой еще впереди. Поэтому ограничимся рассмотренными примерами и подчеркнем, что читающие эту книгу, несомненно, в той или иной форме, так или иначе, но обязательно станут свидетелями, а может быть, участниками будущих успехов робототехники.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'