2.2. Определения робота
Итак, робот, который первоначально был определен Чапеком словами: "Похожий на человека, способный работать, но не способный мыслить", начал рассматриваться не только как персонаж из мира научной фантастики, но и как объект науки и техники - промышленный робот, интеллектуальный робот и т. д. Можно дать несколько различных определений робота.
Хидэтоси Кобаяси (Токийский университет) [2].
Это нечто, в чем к вычислительной машине добавлена способность проявлять физическую активность в ответ на внешнее воздействие. Человек ходит ногами, осматривается вокруг, поворачивая голову, берет предметы руками и осматривает их, воспринимает запахи. Определим робот как устройство, в котором к вычислительной машине добавлены эти специфические черты.
Сигэру Ватанабэ (Токийский университет) [3].
Обязательными являются следующие пять признаков:
- способность передвигаться;
- способность распознавать образы;
- большое количество степеней свободы;
- способность к адаптации;
- способность взаимодействовать с внешними объектами (с использованием памяти).
Масахиро Мори (Токийский технологический институт) [4].
Наличие способности передвижения, автономность, наличие интеллектуальных способностей, универсальность, комбинация признаков человека и машины, самонастраиваемость и управляемость. Как видно из фиг. 2.1, основными признаками робота являются автоматическое управление, подвижность его органов, способность перемещаться и автономность.
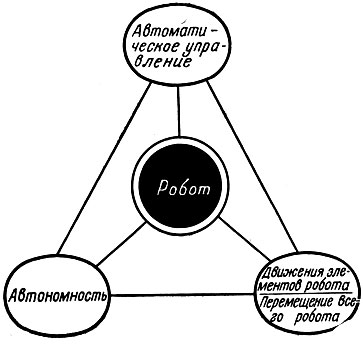
Фиг. 2.1. Три качества, характеризующие роботов
М. В. Слинг (Лондонский университет) [5].
Активное устройство со способностью свободного перемещения и самоуправления. Обладает следующими специфическими элементами:
- вычислительное устройство: имеет способность запоминания и логических действий;
- сенсорные устройства, включая чувства осязания, зрения и т. д.: используются для распознавания объектов;
- рука, манипулирующая объектами;
- самоходное устройство.
Итиро Като (Университет Васэда) [6].
Устройство, в котором собраны в единое целое работающая рука, передвигающиеся ноги и анализирующий действия мозг и которое снабжено такими органами чувств, как дистанционные акцепторы (соответствующие глазам и ушам), тактильные датчики (соответствуют осязанию), органы, способные определять свойства объекта (твердость, упругость), сохранять равновесие и т. д. (фиг. 2.2).
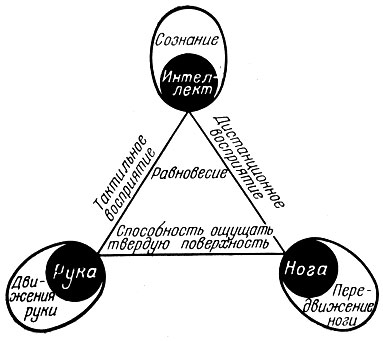
Фиг. 2.2. Три составных элемента роботов
Фудзио Исихара (Институт передачи информации).
Автомат, по внешнему виду напоминающий человека, выполняющий действия, сходные по крайней мере по виду с действиями человека, и в какой-то ограниченной области обладающий способностью к самостоятельному мышлению, равному человеческому или даже превосходящему его.
Эти определения условно можно подразделить на три труппы. Первая отвечает точке зрения Кобаяси и Вата-набэ, которые во главу угла ставят распознавание образов с помощью вычислительной машины. Мори, Слинг и Като с сотрудниками особое внимание обращают на руки и ноги робота. Но если учесть, что "интеллект" робота имеет смысл только при наличии у него конечностей, а руки и ноги, со своей стороны, управляются интеллектом, то можно сказать, что любое из этих двух определений далеко не полно.
На фиг. 2.3 в графическом виде представлены эти два определения с использованием условного трехмерного пространства. Можно, пожалуй, сказать, что первая точка зрения подходит для мыслящего, а вторая - для деятельного робота. Третья точка зрения (Исихара) состоит в том, что робота следует определить как автомат, подобный человеку. Нашей же задачей является определение робота без обращения к специальным теориям.
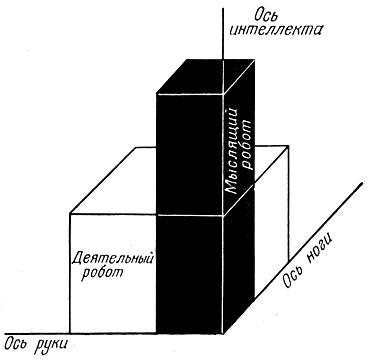
Фиг. 2.3. 'Пространство' робота
Прежде всего, оставив в стороне форму, примем в качестве критерия три категории способностей, которыми обладает живое существо, а именно его умственные способности, функциональные и физические возможности, и оценим с этой точки зрения способности робота. На фиг. 2.4 показано условное трехмерное пространство живого существа, где по трем осям отложены уровень интеллекта, уровень функциональных способностей и Уровень физических возможностей. Функциональные способности в данном случае означают приспособляемся или универсальность, возможность перемещений в пространстве и т. д. Будем считать, что физические возможности включают силу, скорость, способность к непрерывной работе, стабильность характеристик, надежность, возможность взаимодействия, долговечность и другие характеристики. Умственные способности включают способности ощущения, восприятия и "сознания". Сюда относятся также память, логика, способность к обучению и т. д. В сущности, "робот - это трехмерная машина, имеющая три оси, соответствующие пространству живого существа".
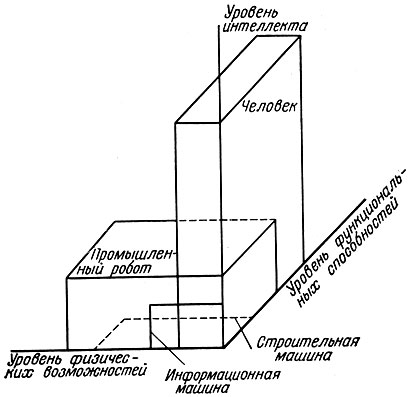
Фиг. 2.4. 'Пространство' живого существа
Промышленный робот, который рассматривается в данной книге, представляет собой трехмерную машину, обладающую, кроме физических возможностей, которые были у прежних машин, еще и функцией универсальности и интеллектом (на первом этапе - памятью). Следует отметить, что с этих позиций машины типа строительных являются двумерными машинами, поскольку они обладают, помимо физических возможностей, еще и способностью к перемещению в пространстве. Вычислительные и другие информационные машины - также двумерные машины, которые, кроме физических возможностей, обладают некоторым интеллектом. Все существовавшие до сих пор машины общего применения можно считать одномерными, имеющими только физические возможности.
- Сидзумэ Ю. (ред.), "Симбиоз человека и машины", изд-во "Хэйбонся", 1968.
- Кобаяси X., "Раздумья о роботах", Кэйсоку то сэйгё", 7, № 12, 837 (1968).
- Сурикагаку, № 64, 6-15 (1968).
- Мори Масахиро, Года Сюхэй, "Роботы, их техника и будущее", Нихон Косо сюппан кёкай (май 1969).
- Кооруда Н. (ред.) (перевод Акаги), "Мир IV двадцатого века", изд-во "Кии Кокуя сётэн", 1968.
- Като И., "Робот и его "руки" и "ноги", Материалы симпозиума по роботологии, 1968.
- Сэки X. (ред.), "Роботология", изд-во "Даямондо", 1971.
https://domino-crm.ru конструктор чат ботов для телеграм.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'