3.3. Вопросы экономичности применения промышленных роботов
1) Окупаемость промышленных роботов. Стимулами для автоматизации служат такие разнообразные факторы, как нехватка рабочих рук, необходимость улучшения условий труда, требование повышения производительности и ряд других, действующих отдельно или совместно. Но определяющим фактором при решении вопроса о целесообразности автоматизации в конечном итоге является экономическая целесообразность. Например, даже тогда, когда автоматизация проводится с целью улучшения условий труда (что не является чисто экономическим фактором), вопрос о том, в каких пределах проводить автоматизацию, решают после изучения ее экономичности. Ведь даже недостаточная заинтересованность исполнителей в конечном счете превращается в проблему заработной платы.
В данном разделе промышленные роботы будут рассматриваться с точки зрения их экономичности в качестве средства автоматизации. При изучении экономических вопросов крайне важен количественный анализ. Однако ввиду многообразия областей применения промышленных роботов в настоящее время трудно обосновать даже рыночную цену и производительность таких роботов; поэтому мы пока отложим обсуждение вопроса на основании конкретных примеров и попытаемся рассмотреть проблему экономичности промышленных роботов в самом общем виде.
2) Методы автоматизации и их сопоставление. Можно выделить два общих метода автоматизации: разработку полностью автоматизированной системы производства и использование промышленных роботов. Существует также промежуточный метод - создание полностью автоматизированной системы производства с применением промышленных роботов. Однако в дальнейшем изложении мы последнего метода касаться не будем.
В табл. 3.1 проведено сопоставление этих двух основных методов автоматизации. Из приведенных данных видно, что полностью автоматизированная система производства более всеобъемлюща, весьма эффективна при использовании ее для массового производства, но не предназначена для многономенклатурного мелкосерийного производства.
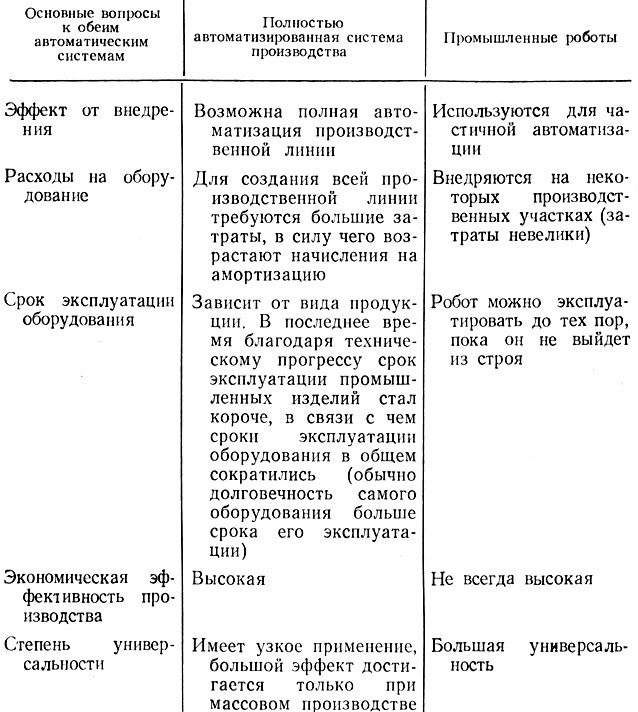
Таблица 3.1
Промышленные роботы обладают прямо противоположными свойствами: они удобны тем, что их легко применять во всевозможных условиях. Но при их использовании не всегда достигается полная автоматизация.
Грубо говоря, различие между этими двумя методами определяется следующим. Полностью автоматизированную систему можно рассматривать как крупный производственный участок, т. е. как основную производственную единицу предприятия. В противоположность этому промышленные роботы, выполняющие работу отдельных производственных рабочих, можно рассматривать как устройства, заменяющие человека. Хотя оба эти метода дают сходный эффект автоматизации, фактически они имеют разное назначение. Поэтому их трудно непосредственно сравнивать.
3) Экономичность промышленных роботов. Для того чтобы внедрение промышленных роботов в производство было экономически выгодно, необходимо оптимальным образом использовать их универсальность, дешевизну и ряд других особенностей, приведенных в табл. 3.1. Ниже мы рассмотрим экономическую сторону внедрения промышленных роботов в сопоставлении с автоматизацией на основе использования специального автоматизированного оборудования.
а) Экономия фонда заработной платы. Эффект сокращения фонда заработной платы за счет внедрения промышленных роботов определяется количеством высвобождаемых рабочих и уровнем их заработной платы. Чтобы упростить изложение, мы в данном случае не будем принимать в расчет дополнительный вклад, вносимый в производство замененными роботом рабочими, рассматриваемый как вторичный эффект автоматизации (экономическое значение имеют лишь те элементы, которые равны первичному эффекту автоматизации или превышают его, но на практике и этот фактор, естественно, следует принимать в расчет при изучении вопроса об экономичности внедрения промышленных роботов).
Реальный эффект сокращения фонда заработной платы, т. е. сколько рабочих и с какой зарплатой удастся высвободить в результате использования робота на каши-то операции, зависит от степени использования технических возможностей робота (определяющих его стоимость) или, другими словами, от того, насколько рационально будет выбрана модель робота для выполнения Данной операции.
Возможности роботов при нынешнем уровне развития техники ограничены. В техническом плане существуют определенные границы, которые нельзя преодолеть при любых затратах. Это уже не проблема стоимости, речь идет о невозможности достижения желаемых технических характеристик робота. Как в качественном виде показано на фиг. 3.2, есть некая предельная линия, которую невозможно пересечь. При приближении к этому пределу стоимость резко возрастает. Поэтому точка равновесия с фондом заработной пла ты меняется в зависимости от того, какие технические параметры планируется реализовать.
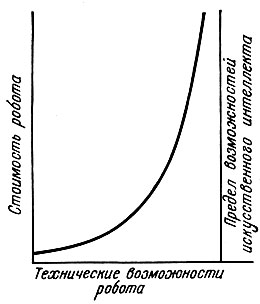
Фиг. 3.2. Границы технических возможностей робота и его стоимость
Однако в будущем, вероятно, практическое применение найдут даже интеллектуальные роботы очень большой сложности. Поэтому важной проблемой может стать степень сокращения фонда заработной платы в зависимости от уровня интеллекта робота. Но интеллектуальные возможности современных промышленных роботов еще очень низки по сравнению с человеком. Поэтому практически нет непосредственной взаимосвязи между уровнем интеллекта промышленного робота и степенью квалификации рабочего, который высвобождается в результате применения робота.
Например, нередко можно сократить число работников высокой квалификации (в большинстве случаев - высокооплачиваемых) путем применения робота для обслуживания устройств для обучения. В подобных случаях диапазон технических возможностей промышленного робота оказывает непосредственное влияние на степень экономии фонда заработной платы. Однако даже в таких случаях уровень интеллектуальных возможностей промышленного робота крайне редко оказывает прямое воздействие. Причина этого заключается в том, что даже если этот уровень настолько высок, что должен быть принят во внимание, стоимость современных интеллектуальных роботов из-за необходимости использования ЭВМ чрезвычайно высока, в результате чего их внедрение не приводит к экономии фонда заработной платы. Возникают даже опасения, что, "если развить технические возможности промышленных роботов и настолько усовершенствовать их интеллект и исполнительные органы, чтобы можно было заменить роботом человека, стоимость роботов будет настолько высока, что возникнут серьезные препятствия для их внедрения".
Хотя физические возможности рабочих, которых можно заменить роботами, далеко не идеальны, промышленные роботы обычно слишком громоздки и уступают человеку в способности распознавания предметов. Поэтому в большинстве случаев для обеспечения необходимого высокого уровня технических характеристик робота требуются большие затраты. С другой стороны, можно отметить следующее. Технические данные промышленных роботов, и особенно их интеллектуальные возможности даже в зоне резкого подъема кривой на фиг. 3.2, значительно ниже возможностей человека-оператора, особенно высокой квалификации, и при таком уровне возможностей эффект экономии оказывается ниже минимального уровня заработной платы рабочего.
Следовательно, экономию фонда заработной платы посредством автоматизации в данном случае следует рассматривать не как решение проблемы квалификации рабочих, которых можно было бы заменить роботами, а как проблему нехватки рабочей силы, т. е. проблему того, "сколько рабочих, выполняющих операции, не требующие высокой квалификации, можно заменить роботами".
б) Капиталовложения в автоматизацию и время их окупаемости. Попытаемся сопоставить промышленные роботы с автоматизированным производственным оборудованием с точки зрения капиталовложений в средства автоматизации.
Как видно из табл. 3.1, с точки зрения достижения полной автоматизации создание единой системы автоматизированного производства следует считать более последовательной мерой. Из анализа множества практических примеров очевидно также, что при этом повышается эффективность массового производства и значительно снижается себестоимость единицы изделия.
Допустим, что изготовители выпускают изделия, не считаясь с амортизацией производственного оборудования, устойчивостью рынка сбыта, колебаниями товарной цены и другими сложными и существенными факторами, и успешно сбывают свою продукцию. Тогда, как показано на фиг. 3.3, если производственная деятельность продолжается при таком использовании производственного оборудования, которое обеспечивает норму прибыли Р иен/ч, общая прибыль Т = ∫ ηР dt со временем возрастает и капиталовложения в специализированное автоматическое производственное оборудование I окупаются тем быстрее, чем выше эффективность производства (на фиг. 3.3 ηa0 > ηa1 > ηr1 > ηr2, и соответственно получается, что время окупаемости T0 < T1 < T2).
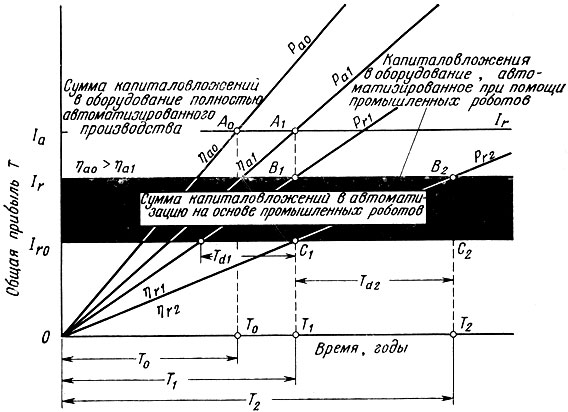
Фиг. 3.3. Капиталовложения в автоматизацию и их окупаемость
Снабдим все величины, относящиеся к автоматизации с помощью специализированного автоматического оборудования, индексом а, а относящиеся к автоматизации с помощью промышленных роботов - индексом r. При увеличении прибыли за счет автоматизированной системы производства суммарные вложения в основной капитал в первом случае, как правило, выше, чем во втором, т. е. Ia >Ir, а для эффективности производства имеем также ηa > ηr. Поэтому при достаточно большом ηа прямая общей прибыли Ра имеет крутой наклон и в случае высокого процента ее прироста при достижении равенства Ра = Iа вложения в основной капитал быстро окупаются. Напротив, если ηа не растет в соответствии с расчетами, а капиталовложения в оборудование превышают плановые расчеты, линия Iа не достигает пересечения с прямой Tа, что с точки зрения экономики означает неудачу. В таких случаях доля вложений в основной капитал для целей автоматизации, разумеется, также входит в Iа и часто нельзя установить, идет ли речь о затратах на цели автоматизации, на повышение эффективности производоства ηа или на какие-либо другие цели. Так или иначе, Iа часто составляет колоссальные суммы.
Напротив, поскольку при автоматизации на основе внедрения промышленных роботов и частичной замены имеющегося производственного оборудования капиталовложения для целей автоматизации делаются на базе уже существующего оборудования, нет значительной разницы в угле наклона прямой общей прибыли Рr до и после внедрения роботов. При этом, если продолжить рассматриваемую прямую Рr, продленный отрезок перекроет лишь часть, которая накладывается от уровня Ir0: если рассчитать время Тd до достижения уровня Ir, то оно определит время оборачиваемости капиталовложений при внедрении промышленных роботов с целью автоматизации.
Однако в связи с тем, что в последнее время период морального износа тех же изделий под влиянием технического прогресса и других факторов сильно сокращается, участились случаи, когда предприятия вынуждены по мере изменения изделий в короткие сроки проводить широкую замену и обновление специализированного полностью автоматического производственного оборудования. Следовательно, период до момента пересечения Рa с уровнем Iа укорачивается, так что становится невыгодно делать капиталовложения без создания такой системы производства, которая характеризовалась бы наклоном Ра, т. е. системы с высокой эффективностью производства.
В отличие от этого при автоматизации производства с помощью промышленных роботов их можно использовать даже при обновлении производственного оборудования с расчетом на выпуск новых изделий, так как роботы обладают универсальностью. Как видно из фиг. 3.3, здесь имеется то преимущество, что капиталовложения в промышленные роботы с целью автоматизации (что соответствует части графика, закрашенной черным цветом) можно использовать и с последующим производственным оборудованием, поэтому сумма последующих капиталовложений в оборудование на столько же сократится.
При принятии решения о том, проводить ли автоматизацию путем создания полностью автоматизированной системы производства с целью получения большей, чем ηr, эффективности производства ηа, или предпочесть автоматизацию на основе внедрения роботов, предвидя возможность их использования и в дальнейшем, следует учитывать период морального износа изделий, величину ηа, размеры вложений в основной капитал Iа и другие факторы.
в) Капиталовложения и время их окупаемости при многономенклатурном мелкосерийном производстве. Поскольку приобретение специализированного оборудования для полностью автоматизированного производства часто затруднительно, задачу автоматизации можно решать на основе внедрения универсальных промышленных роботов. Но даже при многономенклатурном производстве изделий должно быть предусмотрено достаточно большое количество однотипных операций. Выводы относительно автоматизации таких операций делаются в этом случае так же, как это изложено выше в ст. "б",
4) Функции промышленных роботов и их стоимость. Различные модели промышленных роботов характеризуются разным техническим уровнем, они варьируются от таких простых машин, как манипуляторы, до роботов с искусственным интеллектом, хотя период практического применения последних еще не наступил. Поэтому вопрос о выборе моделей нельзя решать в общем виде, поскольку стоимость роботов составляет от нескольких миллионов до нескольких десятков миллионов иен. Конечно, справедливо общее положение, что чем шире технические возможности робота, тем выше его стоимость. Однако можно указать функции робота, которые оказывают наиболее значительное влияние на его стоимость. При внедрении промышленных роботов следует выбирать такие их модели, технические возможности которых необходимы и достаточны с учетом возможных будущих изменений в технологических процессах. При изучении существующих моделей промышленных роботов не рассматриваются интеллектуальные роботы, основное влияние на стоимость которых оказывает стоимость ЭВМ.
а) Параметры кинематики робота. Важное значение имеет решение вопроса о количестве степеней свободы руки, кисти и пальцев робота и допустимой сложности их приводов. Для каждой степени свободы нужно по крайней мере одно приводное устройство. Чем больше у робота степеней свободы, тем большей гибкостью и универсальностью он обладает, но, с другой стороны, тем труднее осуществляется процесс управления, тем сложнее системы программирования и управления системами робота в автоматическом режиме (например, процесс обучения робота, включая разработку средств программирования для управляющей роботом вычислительной машины).
Само по себе увеличение пределов перемещения вдоль каждой из координат не очень влияет на стоимость робота, но расход энергии, необходимой для перемещения того же груза с той же скоростью, при этом возрастаете Поэтому в этом случае увеличиваются размеры энергетического блока и, кроме того, нередко ухудшается точность позиционирования детали в заданном месте. Стоимость робота возрастает ввиду того, что при увеличении перемещений более сложным становится получение той же точности позиционирования.
б) Запоминающее устройство. В качестве программоносителя применяются системы с магнитной лентой, с магнитным барабаном, со штекерной панелью, кулачковые устройства и системы на упорах. Запоминающее устройство промышленного робота дороже других его устройств, поэтому, грубо говоря, стоимость робота определяется стоимостью его системы памяти. При использовании магнитной ленты или магнитного барабана стоимость робота неизбежно превышает 5 млн. иен, а для того, чтобы уложиться в сумму не более 2 млн. иен, приходится прибегать к системе управления по упорам. Системы со штекерной панелью и кулачковые системы занимают по стоимости промежуточное положение.
в) Условия окружающей среды. При использовании робота в условиях обычной температуры и при нормальном давлении не возникает никаких сложностей. Но в случае применения его в особых условиях, например при высоких давлениях, под водой, в агрессивной среде, условиях большого загрязнения или при сильной вибрации, необходимы специальные меры. Одним из факторов, оказывающих значительное влияние на стоимость робота, является также место установки энергетического блока, т. е. встроен ли он в конструкцию робота или установлен отдельно, так что энергия передается на расстояние.
г) Обучение персонала и эксплуатация робота. Нельзя не считаться и с тем, что изготовители несут расходы по обслуживанию потребителей роботов, связанные с инструктированием персонала относительно приемов эксплуатации роботов при их первом применении, с обучением их в течение более продолжительного срока или с разовыми консультациями. Приходится также осуществлять техническое обслуживание, предусмотренное специальными контрактами. Накапливающиеся за длительный период расходы так или иначе оказывают влияние и на стоимость робота.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'