4.5. Системы управления
Системы управления роботов в зависимости от методов обучения, запоминания информации, воспроизведения программы и характера выполняемых роботом операций можно классифицировать так, как представлено в табл. 4.3. Все компоненты систем управления, как правило, независимы, но их совокупность характерна для той или иной конкретной системы.
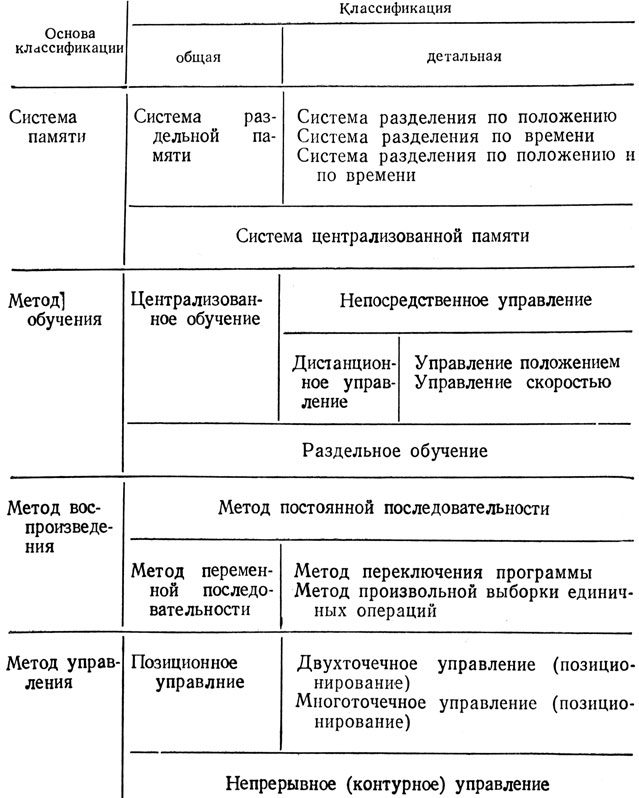
Таблица 4.3. Классификация методов управления
1) Системы памяти. Как уже указывалось, робот должен запомнить информацию о технологическом процессе, включающую в себя информацию о последовательности отдельных операций и о положении органов робота во времени. Эти виды информации различны по своему характеру, и для них требуется различный объем памяти.
Системы памяти можно подразделить на а) системы централизованной памяти, когда вся информация заносится в одно запоминающее устройство, и б) системы раздельной памяти, когда выделяются два или более вида информации, которые запоминаются раздельно. В зависимости от того, какая информация выделяется, можно системы раздельной памяти в свою очередь подразделить на системы разделения по положению, системы разделения по времени и системы разделения по положению и по времени.
Система разделения по положению - такая система, когда в специальное запоминающее устройство заносится только информация о положении, а остальная информация помещается в другое запоминающее устройство. Это вызвано следующими обстоятельствами. Информация о положении является, по существу, аналоговой информацией. При этом необходимо запомнить большое количество положений и притом со сравнительно высокой точностью, в силу чего объем запоминаемой информации сравнительно велик. В качестве устройств запоминания положений используют всякого рода стопорные устройства1, потенциометры и т. д. Они просты, но число позиций памяти в них ограничено.
1 (Например, устанавливают упоры, вдоль которых перемещается релейный элемент типа предельного выключателя. Изменять содержание памяти можно и перемещением упоров по прорези в пластине. Объем памяти можно наращивать установкой упоров в несколько рядов.)
В качестве устройств запоминания информации о последовательности и времени применяются штекерные барабаны с шаговым приводом1. Система разделения по положению применена в роботах "Версатран" (модель с позиционным управлением) компании AMF и "Консларм" фирмы "Исикавадзима Харима Дзюкогё".
1 (На поверхности барабана, приводимого в движение электродвигателем, имеются отверстия, в которые вставляются пластмассовые штыри, воздействующие на контактные выключатели. Существуют, например, 24-шаговые устройства с 30 выходными контактами. Перестановкой штырей легко менять последовательность движений робота. Эти устройства называют также переключателями последовательности.)
В системе разделения по времени выделяется и отдельно запоминается только информация о времени, вся же прочая информация собирается и запоминается совместно. Информация о переходе к следующему шагу программы может запоминаться попутно благодаря тому, что информацию о времени вводят в память в порядке последовательных шагов. Поэтому в качестве устройства запоминания положений можно использовать магнитный барабан, поскольку требуется лишь объем памяти, определяемый числом степеней свободы, умноженным на количество единичных операций. Запоминание информации о времени осуществляют путем настройки реле времени. Конкретным примером реализации данной системы является робот "Юнимейт".
В системе разделения по положению и времени информация о положении, времени и последовательности операций заносится в отдельные запоминающие устройства. Это вызывает необходимость в выборе запоминающего устройства в соответствии с характером вида информации. Среди выпускаемых в настоящее время роботов во многих простых моделях используют именно такую систему. Недостатком данной системы является утомительность обучения, так как проверку программы приходится проводить отдельно для каждого из трех видов запоминающих устройств.
В качестве устройств запоминания положений чаще всего используются стопорные устройства, предельные выключатели, потенциометры; в качестве устройств запоминания времени - реле времени, а в качестве устройств запоминания последовательности - штекерные панели, перфоленты и другие носители.
Система централизованной памяти обычно используется при контурном управлении (continuous path). В качестве запоминающего устройства используют магнитную ленту или магнитный барабан. Метод централизованной памяти имеет следующие преимущества и недостатки:
Преимущества:
- возможность запоминания сложных технологических операций;
- легко осуществимая обратная связь при воспроизведении программы;
- возможность легко менять скорость перемещения схвата.
Недостатки:
- для запоминания продолжительных по времени операций требуется большой объем памяти;
- затруднена частичная корректировка программы;
- отсутствует возможность свободного выбора масштабов времени и перемещений.
Системы централизованной памяти можно классифицировать, как это сделано в табл. 4.4. Конкретным примером реализации данной системы является робот "Версатран" (модель с контурной системой управления) компании AMF.
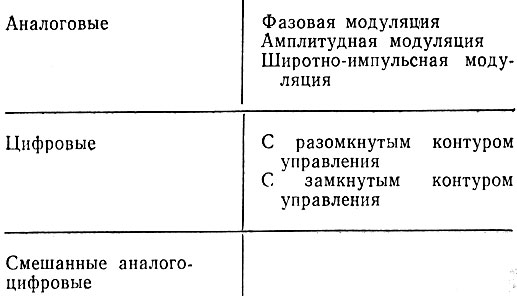
Таблица 4.4. Классификация систем централизованной памяти
2) Методы обучения. При обучении робота любой операции необходимо разбить эту операцию на ряд последовательных шагов и в процессе обучения ввести эту информацию в запоминающее устройство. Информация о положении, которая является содержанием единичных операций, и информация о времени, предназначенная для передачи сигналов перехода к следующему шагу программы, в основе своей является аналоговой. По сравнению с прочей информацией для нее нужен больший объем памяти, поэтому во многих случаях ее вводят во вспомогательное запоминающее устройство. В роботах такого типа часто используется метод раздельного обучения, когда обучение конкретным цифровым величинам, касающимся информации о положении и времени, проводят отдельно от обучения информации о последовательности шагов.
В противоположность этому имеется метод централизованного обучения, когда информация о положении и времени накапливается в соответствии с заданной последовательностью шагов.
При ином подходе к классификации методов обучения можно выделить метод непосредственного обучения, когда оператор в момент обучения непосредственно заставляет робот проделать нужные действия, и метод косвенного обучения, когда обучение производится оператором с помощью информации, выраженной в словесной или цифровой форме.
В табл. 4.5 дано сопоставление различных методов обучения.
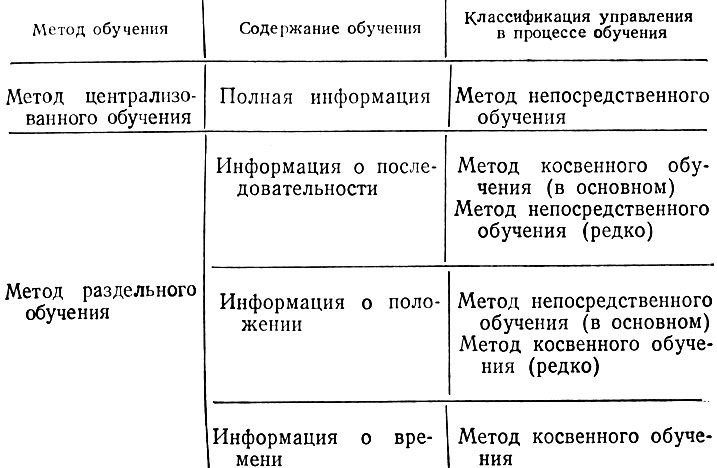
Таблица 4.5. Сопоставление методов обучения
Существуют следующие методы ввода информации о последовательности единичных операций, выполняемых роботом:
а) вручную с помощью кулачков в случаях, когда изменение последовательности шагов затруднено;
б) вручную с помощью штекерной панели и других аналогичных устройств;
в) полуавтоматически с помощью перфоленты или перфокарт;
г) автоматически путем записи информации на магнитный барабан или магнитный сердечник и т. д.
Ввод информации о положении осуществляется следующими методами:
а) с помощью механического стопорного устройства в случаях, когда изменение программы затруднено;
б) с помощью механических упоров, когда изменение программы осуществить несложно;
в) с помощью потенциометров, установленных вне робота;
г) путем записи информации на магнитный барабан.
Ввод информации о времени осуществляется следующими методами:
а) установкой временных интервалов на барабане с шаговым приводом;
б) с помощью нескольких реле времени;
в) с помощью счетчика времени, что дает возможность вести обучение автоматически.
3) Методы воспроизведения. Используемый в роботе метод воспроизведения программы определяет прежде всего его возможности, касающиеся воспроизведения последовательности единичных операций. Вопрос об изменении последовательности единичных операций не возникает только в том случае, когда в роботе принята централизованная система памяти.
При раздельной памяти роботу можно придать адаптивные свойства путем изменения последовательности единичных операций при воспроизведении программы. При этом сами роботы должны быть снабжены устройствами, позволяющими им ориентироваться в окружающей обстановке. Для этой цели на роботе монтируются тактильные датчики, в качестве которых используются предельные выключатели, резисторные датчики давления, различные электрические датчики с изменяемым выходным напряжением, тензодатчики, полупроводниковые элементы PSS, MPS и т. д.
Из зрительных сенсорных устройств используются фототранзисторы, фотоэлементы, телекамеры (видиконы) и др. Они обладают тем преимуществом, что могут обнаруживать объекты без непосредственного контакта с ними.
Существует несколько методов воспроизведения с переменной последовательностью и переключением программ: а) метод выбора программы, который состоит в том, что во время обучения выделяют несколько видов программ, а во время воспроизведения переключают программы в зависимости от сигналов сенсорных устройств; б) метод перехода к отдельным единичным операциям, при котором по сигналам сенсорных устройств в программу воспроизведения добавляются отдельные единичные операции, информация о которых хранится в памяти робота; в) метод подпрограмм, который состоит в объединении ряда единичных операций в подпрограммы и выборе подпрограмм.
4) Методы управления. Различают два основных метода управления промышленными роботами: метод непрерывного или контурного управления и метод позиционного управления. При непрерывном управлении рука робота перемещается по заданной траектории в пределах рабочей зоны обслуживания, при позиционном же управлении задаются только отдельные точки рабочей зоны, в которые рука робота должна прийти при воспроизведении программы.
Метод позиционного управления в свою очередь можно подразделить на а) метод двухточечного управления, когда возможно позиционирование только в крайних точках зоны перемещения по той или иной координате, и б) метод многоточечного управления, при котором возможно позиционирование в нескольких точках зоны перемещения. Наиболее часто используются методы непрерывного и многоточечного управления, реализуемые с помощью следящих систем с обратной связью по положению. При двухточечном позиционировании зону перемещения обычно ограничивают жесткими механическими упорами, а для привода используют пневмоцилиндры. Имеются роботы, у которых позиционирование в нескольких точках также обеспечивается с помощью механических упоров. Методы управления промышленными роботами можно разделить на две группы также и по виду используемых датчиков обратной связи: аналоговых или цифровых. Системы управления используются как замкнутого, так и разомкнутого типа.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'