5.3. Эксплуатация робота "Транс"
1) Конструкция "Транса". Внешний вид "Транса" модели RBM-100 показан на фиг. 5.15. Робот состоит из механического блока, включающего руку, которая может двигаться в вертикальном направлении и осуществлять поворот вокруг вертикальной оси, энергетического блока, исполнительного гидропривода, передаточного механизма и т. д., а также пульта ручного управления и набора рабочей программы.

Фиг. 5.15. Общий вид робота 'Транс' (RBM-100)
Рука не перемещается по горизонтали, но длину ее в небольших пределах можно менять. На конце руки установлен вакуумный механизм схвата. Кроме вакуумного, можно установить магнитный схват, а также схват с пневматическим или гидравлическим приводом. Рабочая зона руки представляет собой цилиндрическую поверхность.
2) Программирование работы робота. Движениями руки робота управляет цикловая система управления, в которой в качестве путевых переключателей используются электромагнитные бесконтактные реле.
На фиг. 5.16 приведена схема управления рукой. Рука имеет четыре путевых переключателя для каждого направления движения. При перемещении руки в системе управления происходит сравнение сигнала от путевого переключателя, указывающего положение руки, с сигналом положения на штекерной матрице панели управления, указывающим, в положении какого переключателя рука должна быть остановлена. Гидрораспределить удерживается открытым для движения вперед или назад до момента совпадения сигналов. Направление движения определяется сравнением предыдущего и отрабатываемого сигналов.
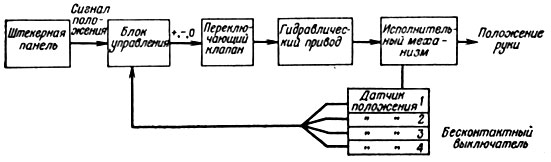
Фиг. 5.16. Блок-схема управления
Путевые переключатели можно установить в любом месте в пределах зоны действия руки; при установке путевых переключателей 1-4 в определенных местах можно перемещать руку через заданные точки в необходимой последовательности и в сочетании с работой механизма схвата выполнять определенный цикл операций при последовательной смене сигналов положения от штекерной панели (установка путевых переключателей на практике осуществляется перемещением руки в заданное положение; см. п. 5.3).
Последовательность сигналов положения набирается на штекерной панели и по порядку считывается при помощи шагового искателя.
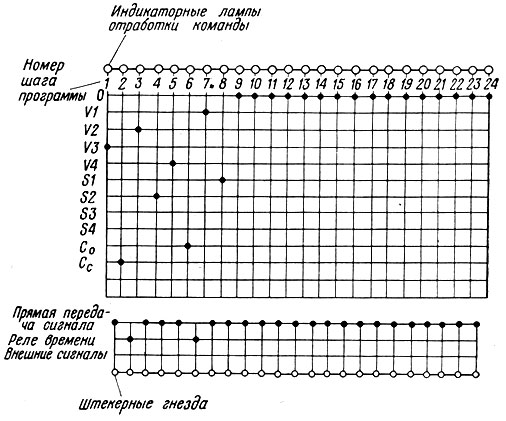
Конфигурация штекерной панели показана на фиг. 5.17 (точки пересечения линий обозначают штекерные гнезда). V1-V4, S1-S4 означают путевые переключатели 1-4 перемещения по вертикали и поворота руки, С0, Сс - открывание и закрывание схвата (присасывание и отпускание).
Фиг. 5.17. Схема штекерной панели
Максимальное количество шагов в программе - 24. Номер шага во время цикла указывается световым индикатором рабочего положения. Положение руки при каждом шаге устанавливают при помощи штекера. Однако при сохранении положения, совпадающего с прежним шагом, вставлять штекер в гнездо не нужно (в схеме, о которой говорилось выше, сохраняется положение предыдущего шага, поэтому установка производится только во время его изменения).
Команды перехода к следующему шагу программы могут быть трех типов: непосредственная команда при отработке предыдущего шага, временная команда и сигнал с внешнего оборудования. При подаче непосредственно сигнала окончания предыдущего шага переход к следующему шагу программы делается тогда, когда рука переместится в заданное положение (закрывается гидрораспределитель). Если скоммутировано реле времени, рука после отработки очередного шага остается неподвижной в течение интервала, задаваемого находящимся на пульте управления реле времени, после чего отрабатывается следующий шаг. Реле времени одно, максимальный устанавливаемый на нем интервал равен 10 с. При связи с внешним оборудованием к нему подается командный сигнал и переход к следующему шагу происходит при получении сигнала от внешнего устройства. Возможна блокировка с внешними устройствами. Сигнал блокировки включается при помощи клемм на пульте управления.
Набор команд для управления внешним оборудованием осуществляется коммутирующими проводниками в нижней части штекерной панели.
На примере, показанном на фиг. 5.17, сигналы положения руки на каждом шаге и действия схвата соответствуют данным табл. 5.4 (черными точками показаны положения включения штекеров).
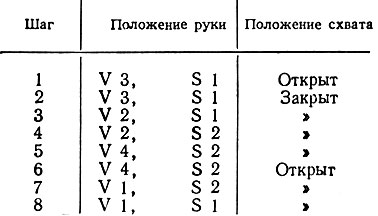
Таблица 5.4
Что касается перемещений руки, то реле времени включены только между шагами 2 и 3, 6 и 7, а на остальных шагах включен "Прямой ход". В данном случае использованы только восемь шагов, а на неиспользованных шагах штекеры включены в гнезда "Нулевое положение" и "Прямой ход". При переходе от 24-го к 1-му шагу производится подключение "Прямого хода" и "Внешнего устройства". Подобные программы основаны на принципе "одно действие на каждом шаге" (например, указание позиции в одном направлении, указание открывания или закрывания схвата и т. д.).
3) Ручное управление. На фиг. 5.18 показаны детали пульта управления (штекерную панель см. на фиг. 5.17). Руку можно приводить в действие группой кнопочных переключателей. При установке переключателя "Автоматическое/ручное управление" в положение "Ручное управление" после нажатия кнопок "Подъем", "Спуск", "Поворот вправо" или "Поворот влево" рука перемещается на замедленной скорости в требуемом направлении. Включение и выключение схвата происходят при нажатии кнопок открытия и закрытия схвата (оба выключателя имеют фиксаторы).
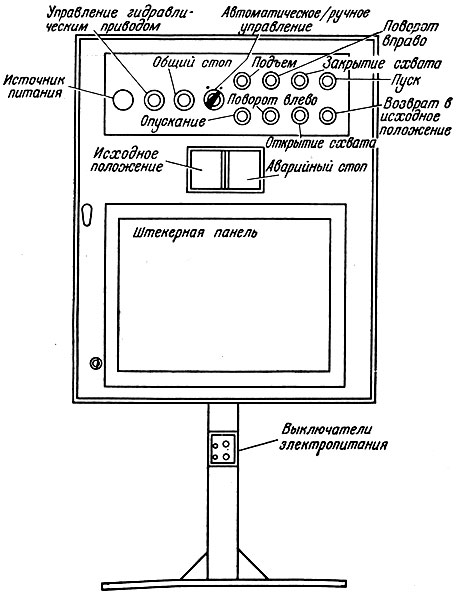
Фиг. 5.18. Пульт управления
При нажатии кнопки "Возврат в исходное положение" шаговое реле возвращается в положение 1, устанавливается положение считывания сигнала позиции первого шага и загорается индикаторная лампа исходной позиции.
При установке переключателя "Автоматическое/ручное управление" в положение "Автоматическое управление" после нажатия кнопки "Пуск" рука перемещается в соответствии с последовательностью сигналов положений, установленных на штекерной панели.
При необходимости экстренной остановки робота нажимается кнопка "Общий стоп". При этом загорается лампа аварийного останова, рука мгновенно останавливается и выключаются все агрегаты вплоть до гидравлического насоса.
4) Установка датчиков положения. На "Трансе" имеются четыре датчика положения руки по вертикали и углу поворота. Эти датчики могут быть установлены в любом положении. Механизм установки датчиков в вертикальном направлении показан на фиг. 5.19. Бесконтактные переключатели укреплены на держателях, которые можно легко передвигать по вертикали. Пластины с магнитами располагаются на руке. Сигналы выключателей поступают через промежуточные реле. На пластине установлены два магнита, а на держателе - два бесконтактных выключателя, которые предназначены для торможения и остановки.
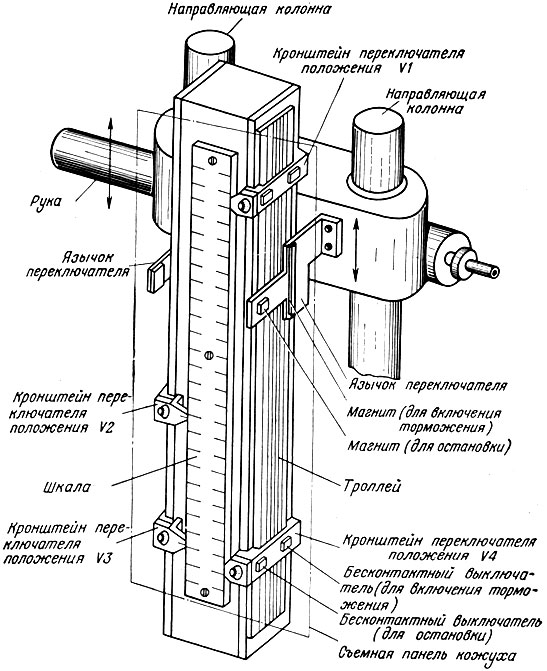
Фиг. 5.19. Механизм установки положений датчиков
Для плавной остановки руки она перед позицией остановки переключается на медленную скорость (скорость торможения). Положение руки, в котором производится переключение на медленную скорость, определяется переключателем торможения, а положение остановки - переключателем остановки.
Чтобы установить держатели в заданном положении, рука предварительно посредством ручного управления приводится в заданное положение. Затем перемещают держатель и устанавливают его в положение, совпадающее с пластиной. Совмещение их положений можно обнаружить по загоранию индикаторной лампы в верхней части поворотной колонны (фиг. 5.15). Лампа продолжает гореть при перемещении еще на 20 мм, поэтому надо точно фиксировать момент начала загорания. При установке держателей переключатели используют по очереди.
В роботе имеется также аналогичный механизм для контроля положений при повороте. Установка датчиков положения производится при снятых кожухах (см. 5.15)
5) Пример составления программы. Пояснения даются здесь на примере операций поочередного переноса Деталей с двух лотков на подвесной конвейер (фиг. 5.20). Исходя из расстановки оборудования, путь руки определен точками 1-2-3-4-5-6-7-8-1 (см. фиг. 5.20). Начало движения вниз, при котором детали устанавливают на конвейер, из точек 1 в 2 и из 5 в 6 производится по сигналу LS1 (сигнал прихода конвейера в позицию переноса детали), а начало движения руки вверх, когда детали снимаются с поворотных устройств и перемещаются из точки 3 в точку 4 и из точки 7 в точку 8 - по сигналам LS2, LS6 (сигналы наличия детали на поворотном устройстве). В этом случае сигналы положения на каждом из шагов и состояние управления переходом к следующему шагу программы будут выглядеть так, как указано в табл. 5.5.
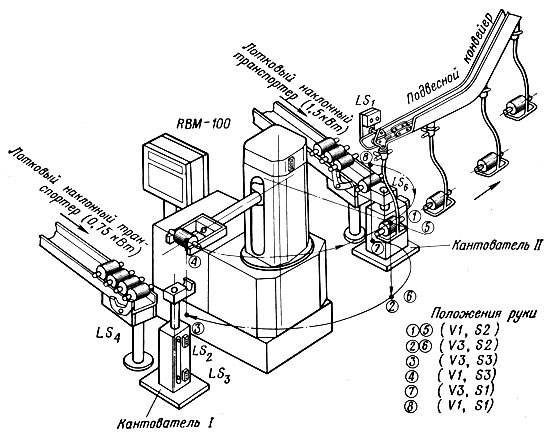
Фиг. 5.20. Пример применения робота
Состояние по табл. 5.5 устанавливают на штекерной панели (состояние установки показано на фиг. 5.21). Захват в данном случае имеет форму вилки, поэтому зажим и разжим не нужны.
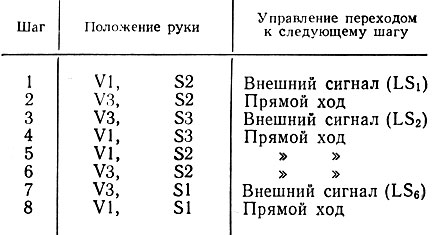
Таблица 5.5
Затем устанавливают в заданные положения датчики V1, V3, S1, S2, S3 (о методе установки датчиков см. п. 5.3).
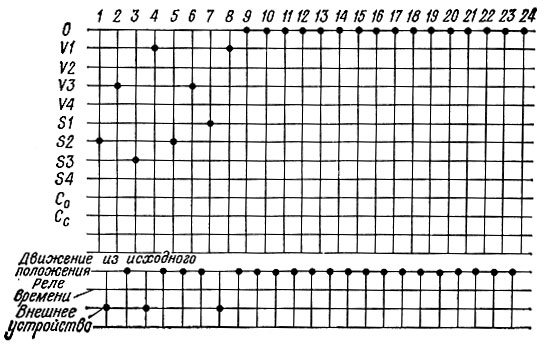
Фиг. 5.21. Пример программирования робота
После этого нажатием кнопки "Возврат в исходную точку" и переводом шагового реле в положение 1 при помощи выключателей "Подъем", "Спуск", "Поворот вправо" и "Поворот влево" приводят руку в исходную точку (V1, S2). При этом о положении руки можно судить по индикаторным лампам вверху корпуса робота.
После завершения такой подготовки переключатель "Автоматическое/ручное управление" ставят на автоматический режим и, нажав кнопку "Пуск", автоматически повторяют операции.
Скорость движения руки во время автоматической работы можно регулировать при помощи регулирующего винта (находится на панели гидравлики внутри корпуса). При этом быструю скорость перемещения по вертикали и разворота вправо и влево и скорость торможения можно регулировать независимо друг от друга.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'