5.2. Эксплуатация робота "Версатран"
1) Конструкция робота "Версатран". Робот "Версатран" модели Е-302 состоит, как показано на фиг. 5.7, из четырех агрегатов, которые соединены друг с другом при помощи шлангов и кабелей.
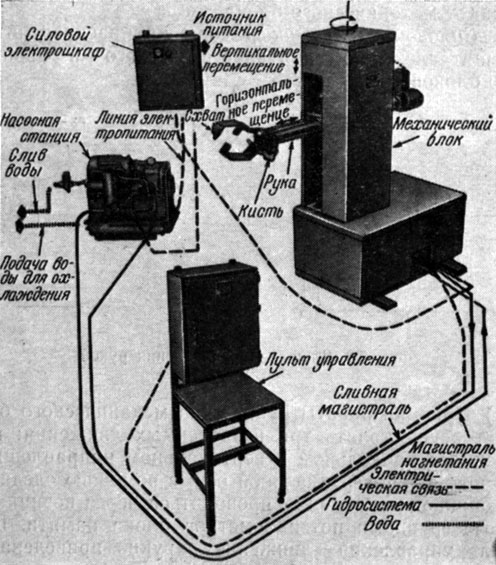
Фиг. 5.7. Агрегаты робота 'Версатран'
а) Механический блок служит для выполнения операций перемещения деталей. Горизонтально расположенная рука может выполнять прямолинейные движения в продольном и вертикальном направлениях и поворот. На конце руки имеется кисть, которая может поворачиваться вокруг двух взаимно перпендикулярных осей. На конце кисти укреплен механизм схвата, который открывается и закрывается для зажима детали.
б) Пульт управления служит для управления движениями механического блока и регулирования мощности всей системы. Управление механическим блоком может быть ручным или автоматическим. В последнем случае последовательность операций устанавливают на наборном поле на пульте управления.
в) Энергетический блок служит для питания рабочей жидкостью исполнительной гидросистемы механического блока. Для удобства размещения он выполнен отдельно от механического блока.
г) Силовой электрошкаф содержит распределительный щит электропитания энергетического и механического блоков.
2) Принцип работы руки. Рука механического блока может осуществлять три независимых движения: перемещения в продольном и вертикальном направлениях и поворот вокруг вертикальной оси; с помощью следящего гидропривода она может проводиться через позиции, заданные группами потенциометров блока памяти. Блок-схема управления движением руки приведена на фиг. 5.8.
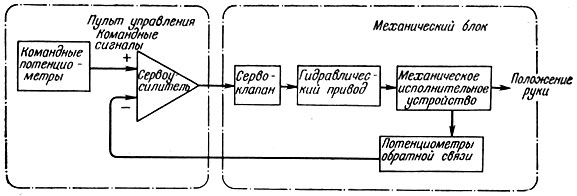
Фиг. 5.8. Блок-схема управления рукой
На роботе "Версатран" установлено три следящих гидропривода для продольного и вертикального перемещений и поворота руки. Положение руки изменяется путем включения реле с помощью той или иной группы командных потенциометров. При подаче команд "включено" или "выключено" движения кисти происходят от упора до упора.
3) Принцип программирования движений робота. Для того чтобы "Версатран" выполнял заданную программу, должны быть определены рабочие перемещения руки, рабочие позиции, препятствия и другие условия работы, а траектория движения должна быть представлена в виде ломаной линии, проходящей через заданные точки (считается, что между точками движение происходит по прямой). В соответствии с полученной последовательностью движений нужно запрограммировать подачу управляющих сигналов, соответствующих положениям руки, к следящим гидроприводам руки. При подаче очередного сигнала управления рука кратчайшим путем перемещается из занимаемого положения в позицию, соответствующую очередному сигналу, останавливается в этом положении и ожидает следующей команды.
На фиг. 5.9 показана блок-схема программирования робота "Версатран" (пунктирными линиями показаны легко изменяемые электрические связи). Приведенная схема соответствует программированию движения только по одной координате.
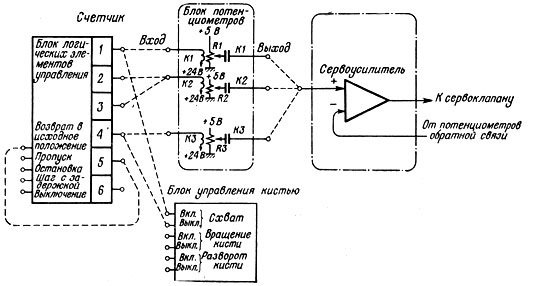
Фиг. 5.9. Принципиальная блок-схема программирования
С входом следящего привода через контакты реле К1-К3 соединен выход управляющих потенциометров R1-R3, и при переключениях реле подаются сигналы положения руки. Переключение реле производится при помощи кольцевого счетчика, собранного из унифицированных блоков. На фиг. 5.9 показан кольцевой счетчик на 6 команд продольного перемещения руки. Когда кольцевой счетчик находится в положении 1, происходит включение реле К1, в положениях 2 и 3 включается реле К2 (выходы 2 и 3 счетчика подключены к вводам реле 2), а в положении 4 - реле К3.
Кольцевой счетчик управляется блоком логических элементов. Переход к следующему шагу происходит после того, как сигналы рассогласования трех сервомеханизмов позиционирования становятся равными нулю (фиксируется отсутствие напряжений на выходе трех сервоусилителей).
Логический блок управления позволяет также выполнить следующие операции: возврат в исходное положение (возврат счетчика в положение 1), пропуск (пропуск определенных положений счетчика), остановку (остановку счетчика в заданном положении), задержку шага (переход к следующему шагу после остановки счетчика на определенный промежуток времени), выключение (окончание операции). Переключением клемм логического блока схему можно приспособить к выполнению заданных требований.
Каждым шагом счетчика задаются новые команды на перемещение руки, а также на закрытие и раскрытие схвата (табл. 5.2). Перемещение руки между шагами счетчика осуществляется по прямой. Когда счетчик устанавливается в положение 5, его возврат в исходное положение происходит быстрее, чем исполняются команды механизмами робота. Поэтому механизмы находятся в движении при положениях счетчика 1-4. Имеется схема задержки, обеспечивающая действие схвата только после прихода руки в заданное положение. Программа составляется таким образом, чтобы счетчик перемещался на шаг только после срабатывания схвата.
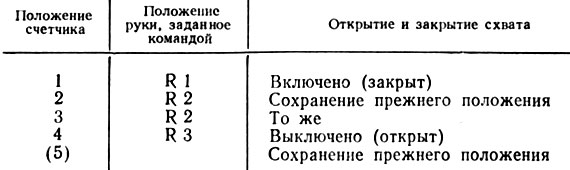
Таблица 5.2
Входы и выходы блоков соединяются с наборным полем пульта управления коммутирующими проводами, что позволяет легко изменять схему и соответственно последовательность операций. Заданные положения руки изменяются вращением потенциометров.
4) Управление механическим устройством. На фиг. 5.10 показана панель пульта управления работой механического устройства. Пульт состоит из следующих унифицированных блоков:
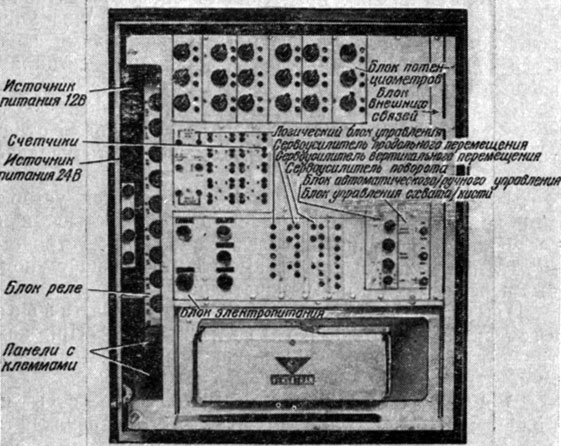
Фиг. 5.10. Панель пульта управления
а) Блок потенциометров состоит из диска для установки положения руки, проволочных потенциометров с фиксатором и реле включения потенциометров.
Над каждым потенциометром установлены лампа включения и клеммы контроля выхода. При необходимости проверить потенциометр во время его работы на панели можно измерить напряжения на его выходе. Стандартная модель "Версатрана" имеет 18 потенциометров, вообще же число их может достигать 24.
б) Блок счетчика представляет собой электронный кольцевой счетчик. Сигналы с выхода счетчика управляют положениями руки и кисти и движениями схвата. В счетчике установлены лампа индикации сигнала на входе и клеммы контроля сигнала на выходе. Состояние счетчика можно определить по миганию лампы.
В стандартной модели робота счетчик может отработать 20 шагов, но число шагов может быть увеличено до 50.
в) Логический блок управления является устройством, которое управляет последовательностью шагов счетчика и обеспечивает связь с внешними устройствами. На поверхности панели имеются следующие кнопочные переключатели и выключатели:
- Ручной переключатель возврата счетчика в исходное положение. При нажатии этого переключателя счетчик возвращается в положение 1.
- Автоматический переключатель шагов счетчика. При нажатии этого переключателя счетчик быстро переключает последовательные шаги программы. Используется для быстрой установки заданного положения счетчика.
- Переключатель единичных шагов счетчика. Каждый раз, когда нажимают этот переключатель, счетчик делает по одному шагу. Используется во время составления программы операций (см. ниже) и во время проверки после завершения программирования для пошагового переключения счетчика.
- Переключатель режима предназначен для управления сигналами остановки при автоматическом управлении. Он может быть установлен в одну из трех позиций: "Включено", "Выключено" и "Автоматическое".
При установке "Включено" счетчик останавливается на первом шаге программы и сохраняет это состояние до тех пор, пока вручную не будет дан сигнал переключения шага. При установке "Выключено" счетчик независимо от команды остановки, установленной на наборном поле, переходит к следующему шагу, если механизм руки неподвижен. Используется для проверки программы, за исключением связей с внешним оборудованием.
При установке в позицию "Автоматическое" счетчик переключается на режим отработки программы, набранной на наборном поле (блокировка с внешними устройствами осуществляется полностью). Используется во время автоматического выполнения операций.
г) Сервоусилители являются усилителями сервомеханизмов позиционирования руки при ее горизонтальном и вертикальном перемещениях и развороте. На панели каждого усилителя имеются лампа индикации и контрольные клеммы. С помощью индикаторных ламп легко установить причины отказов.
д) Блок автоматического/ручного управления служит для переключения управления рукой робота в автоматический режим или в режим ручного управления и подачи сигналов управления рукой робота во время ручного управления.
При установке переключателя в положение "Автоматическое" рука будет двигаться по командам, которые формируются в зависимости от коммутаций блока потенциометров, логического блока управления, блока счетчика и наборного поля.
При переключении в положение "Ручное" управляющий сигнал положения руки подается с выходов трех потенциометров данного блока. Следовательно, руку робота можно перемещать путем вращения ручек этого блока.
е) Блок схват/кисть предназначен для переключения на ручное и автоматическое управления схвата и кисти. Имеются три переключателя (три положения: "Включено", "Выключено", "Автоматическое") для открывания - закрывания схвата, вращения и поворота кисти. При ручном управлении переключения в положения "Включено" и "Выключено" определяют соответствующие движения. При переключении в позицию "Автоматическое" движения схвата и кисти задаются командами, которые определяются коммутацией блоков счетчика, логического блока и наборного поля.
ж) Наборное поле представляет собой панель, на которой входные клеммы каждого блока выведены на гнезда матрицы и их взаимное соединение осуществляется при помощи соединительных проводов со штекерами (коммутирующие шнуры).
Наборное поле можно заменять другим полем с другой, уже набранной программой.
з) Блок питания осуществляет управление источником электропитания и гидравлическим силовым блоком и имеет следующие кнопочные переключатели:
- Выключатель электропитания (левый верхний). При включении включается электропитание пульта управления и гидравлического силового блока. В этот момент счетчик автоматически возвращается в положение 1.
- Переключатель возврата (правый верхний). Этот переключатель используется только во время пуска в начале работы и при пуске после неожиданных остановок (после включения электропитания). При включении электропитания в случае, когда рука не находится в позиции, соответствующей первому шагу счетчика, подвижные звенья затормаживаются, чтобы избежать резкого рывка руки. Когда в этом случае включается переключатель возврата, рука медленно перемещается к исходному положению, заданному командой шага 1 (только в течение того времени, когда переключатель включен). Таким образом, с помощью переключателя руку переводят в заданную командой позицию. В случае отклонения руки от исходного положения движения руки при нажатии кнопки "Пуск" не произойдет.
- Переключатель "Пуск" (средний справа). При включении этого переключателя, после того как рассогласование исходного и действительного положений руки было при помощи переключателя возврата сведено к нулю, гидрозамок выключается и установленные на наборном поле операции выполняются автоматически.
- Кнопка "Стоп" (справа внизу). При нажатий этой кнопки завершается действие, соответствующее команде, которая имеется на счетчике в этот момент, и рука в этом положении останавливается.
- "Аварийный стоп" (нижний слева). При нажатии этой кнопки рука мгновенно останавливается. Электропитание также выключается.
и) Прочие.
- Связь с внешним о 66 рудо в а н и ем. Для подачи сигналов на внешнее оборудование используется блок реле. Контакты реле замыкаются на определенных шагах счетчика и выводятся на внешнее оборудование с клеммной панели. При подаче сигнала на внешнее оборудование счетчик останавливается. Следующий шаг счетчик теперь сделает после прихода сигнала от внешнего оборудования. Таким путем осуществляется синхронизация движений руки с работой внешнего оборудования.
- Кнопочный выключатель "Конец цикла". При автоматическом режиме работы пульт управления (фиг. 5.10) закрыт крышкой. На крышке имеются кнопки, функции которых те же, что и у кнопок блока питания. Управлять ими можно и при закрытой крышке. Кроме указанных выключателей, имеется кнопка "Конец цикла", специально предназначенная для автоматического управления. При нажатии этой кнопки рука останавливается после прихода в конечную позицию данной программы и все, вплоть до электропитания, выключается.
5) Пример составления программы. Пояснения ниже даются на примере программы операции, при которой рука проходит путь, показанный на фиг. 5.11. Положение всех точек и действия схвата соответствуют данным фиг. 5.11.
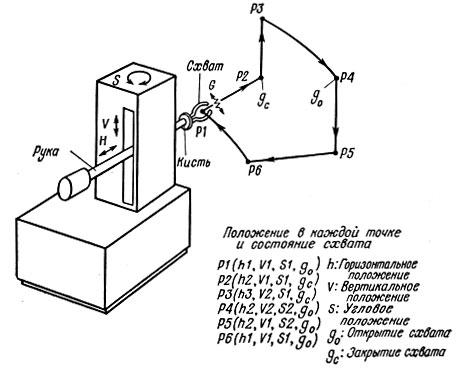
Фиг. 5.11. пример запрограммированного движения руки робота
В точке Р2 деталь захватывается, затем рука останавливается в точке Р3, а получив внешний сигнал, перемещается в точку Р4, где оставляет деталь. Кисть при этом неподвижна. Команды перемещения руки в каждую из точек Р1-Р6 и команды открытия и закрытия схвата образуются при соответствующих положениях счетчика 1-8. Позиции руки h1, V1, S1, h2, V2, S2 устанавливают с помощью потенциометров R1-R6. (Связь между значениями координат руки и используемыми потенциометрами определена очередностью точек Р1-Р6. Твердых правил распределения значений координат и потенциометров не существует, но, если значения координат точки Р1 распределить по потенциометрам R1-R3, это упростит проверку во время составления программы.)
Связи между положениями счетчика, используемыми при этом потенциометрами и вводами в сервоусилитель указаны в табл. 5.3. Они составлены так, чтобы при открытии и закрытии схвата в положениях счетчика 3 и 6 позиция руки оставалась бы той же, что и при прежнем положении, и выполнялись только действия захвата. Эти положения коммутируются на наборном поле при помощи коммутирующих проводов. На фиг. 5.12 показана схема соединений наборного поля (пунктирными линиями обозначены связи через коммутирующие провода).
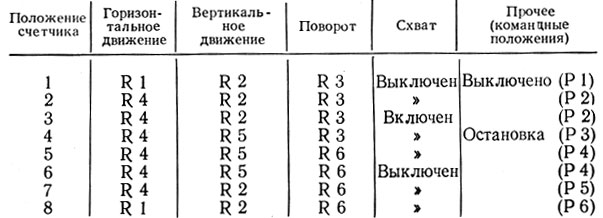
Таблица 5.3. Выводы сервоусилителей
Путем пошагового ручного переключения счетчика устанавливают заданные значения R1-R6 и этим завершают программу. При этом существует опасность, что рука робота сделает слишком резкое движение при перемещении счетчика на один шаг. В связи с этим счетчик перемещают лишь после согласования потенциометров, используемых на предыдущем и последующем шагах. Затем группу переключателей переводят на автоматическое управление и при нажатии кнопки "Пуск" повторяют операции. По окончании работы счетчик при нажатии кнопки "Конец цикла" останавливается в положении 1 и остается в этом состоянии, готовый к началу следующего цикла.

Фиг. 5.12. Схема соединений наборного поля. На данной схеме показаны электрические соединения; на практике коммути' цию между счетчиком и потенциометром выполняют жгутом проводов, соединенных со стороны потенциометра
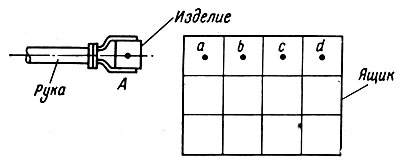
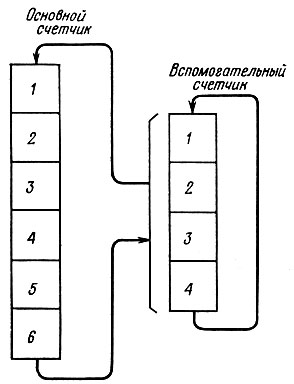
6) Специальная функция. В "Версатране" для управления используется кольцевой счетчик, что дает возможность выполнять такие операции, как разгрузка или загрузка тары, без увеличения количества шагов программы. Для этого используется вспомогательный счетчик.
На фиг. 5.13 показан пример такого действия. Здесь речь идет о повторении каждый раз одной и той же операции при укладке изделий в отделения ящика (в точки а, b, с, d); взяв изделие, робот переносит его в точку А, а из точки А возвращается назад, чтобы взять следующее изделие. Команды этих одинаковых действий задаются при помощи главного счетчика, а команды на операции движений из точки А в различные точки а-d - при помощи вспомогательного счетчика.
Фиг. 5.13. Пример применения
На фиг. 5.14 показана взаимная связь главного и вспомогательного счетчиков. Когда главный счетчик переключен на шаг 6, на следующем этапе вспомогательный счетчик делает шаг 1. Затем главный счетчик возвращается в исходное положение 1.
Фиг. 5.14. Подсистема отсчета
Если в положениях 1-6 главного счетчика подаются команды позиционирования в точку А, а в положениях 1-4 вспомогательного счетчика запрограммированы команды позиционирования в точки а, Ь, с, d, можно в одном цикле работы главного счетчика перемещать руку соответственно в точки а, b, с, d. Если бы не использовался вспомогательный счетчик, необходимо было бы увеличить число шагов главного счетчика (в данном примере до 18). В рассматриваемом нами случае присоединение вспомогательного счетчика позволяет осуществлять укладку изделий в тару в два ряда.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'