5.1. Эксплуатация робота "Юнимейт"
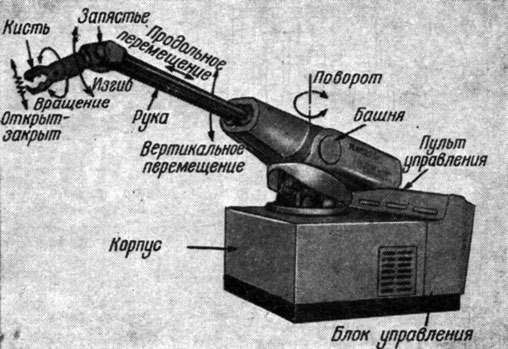
1) Конструкция робота "Юнимейт". Общий вид робота "Юнимейт" показан на фиг. 5.1.
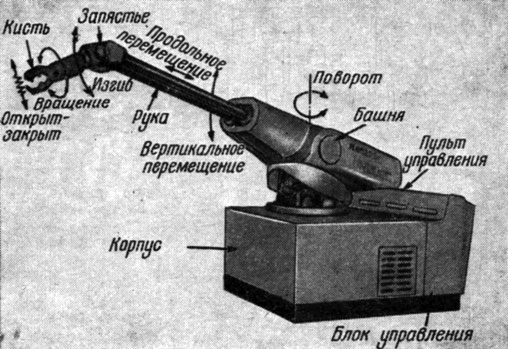
Фиг. 5.1. Общий вид робота 'Юнимейт'
Конструкция робота включает подвижную руку, блок управления движениями руки, энергетический блок, основание, на котором смонтированы все агрегаты робота, включая исполнительный гидропривод. Конструктивно робот выполнен как одно целое.
Рука робота может поворачиваться в горизонтальной и вертикальной плоскостях; кисть руки может поворачиваться в вертикальной плоскости и вращаться вокруг продольной оси; схват может открываться и закрываться.
Привод руки и кисти - гидравлический, а схвата - пневматический.
Движения руки робота управляются посредством кнопок и переключателей на панели блока управления или с помощью пульта ручного управления ( см. фиг. 5.4; на фиг. 5.1 он не показан, при использовании его подсоединяют с помощью кабеля с противоположной стороны). Используя панель управления и пульт ручного управления, можно программировать работу робота в процессе непосредственного перемещения руки через рабочие позиции.
2) Программирование рабочего цикла. На фиг. 5.2 показана схема привода руки (точнее, схема реализации движения только по одной координате). Рука робота может двигаться в одном из двух режимов - в режиме обучения, когда рабочий цикл робота программируется оператором, и в режиме многократного автоматического воспроизведения записанной программы.
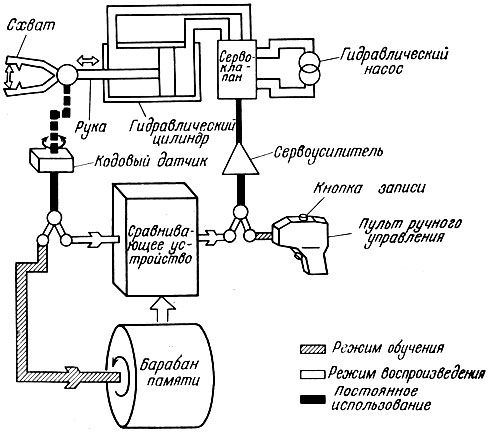
Фиг. 5.2. Принципиальная схема робота
В режиме обучения руку можно перемещать в любое положение при помощи кнопок пульта ручного управления. В этом случае сигналы с выхода кодового датчика, соответствующие положению руки, подаются на вход блока памяти, содержащего магнитный барабан. При нажатии кнопки записи на пульте ручного управления в блок памяти заносятся координаты положения руки, занимаемого ею в данный момент.
При работе в режиме воспроизведения движения управляются цифровой позиционной системой управления и рука может останавливаться в положении, соответствующем командам на выходе блока памяти.
Путем последовательной подачи команд в блок сравнения с барабана памяти можно перемещать руку через заданные позиции и заставить "Юнимейт" выполнять операции, включая захват. На барабане памяти последовательно записываются пять координат положения руки и кисти для каждой заданной позиции, а также сигналы управления движением схвата, уровень точности позиционирования, сигналы включения временных задержек, команды на прием внешних сигналов и на передачу сигналов в цепи внешнего оборудования и т. д. (информация, внесенная в запоминающее устройство от одной заданной позиции, определяет шаг программы).
Для того чтобы робот "Юнимейт" выполнял заданные операции с учетом величин перемещения руки, рабочих положений и других факторов, необходимых для выполнения операций, а также наличия препятствий, предварительно намечается порядок прохождения позиций; в соответствии с этим порядком в режиме обучения по данным позициям последовательно проводится рука робота, управляемая от пульта ручного управления, причем в барабан памяти заносятся координаты каждой позиции. В режиме воспроизведения рука проходит эти записанные на барабане памяти позиции в той же последовательности.
Переход к следующему шагу программы в режиме воспроизведения происходит при соблюдении следующих условий: нулевое рассогласование сигналов заданного и отработанного положения в системе позиционирования, получение внешних сигналов об исполнении команд, окончание времени задержки и т. д.
3) Движения руки робота. На фиг. 5.3 показано расположение кнопок и переключателей на панели блока управления, а на фиг. 5.4 изображен пульт ручного управления. Как уже указывалось, в роботе предусмотрены режимы обучения и воспроизведения. Группы переключателей на панели управления расположены таким образом, что во время работы в режиме обучения пользуются переключателями, находящимися справа от переключателя смены режима работы, а во время воспроизведения - переключателями, находящимися слева от него.
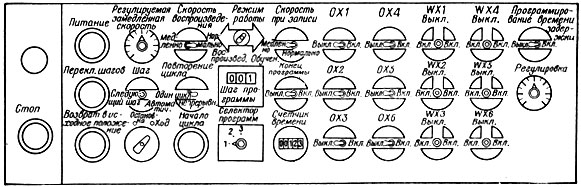
Фиг. 5.3. Панель управления роботом. OX - блоки подачи сигналов к внешнему оборудованию; WX - блоки приема сигналов от внешнего оборудования
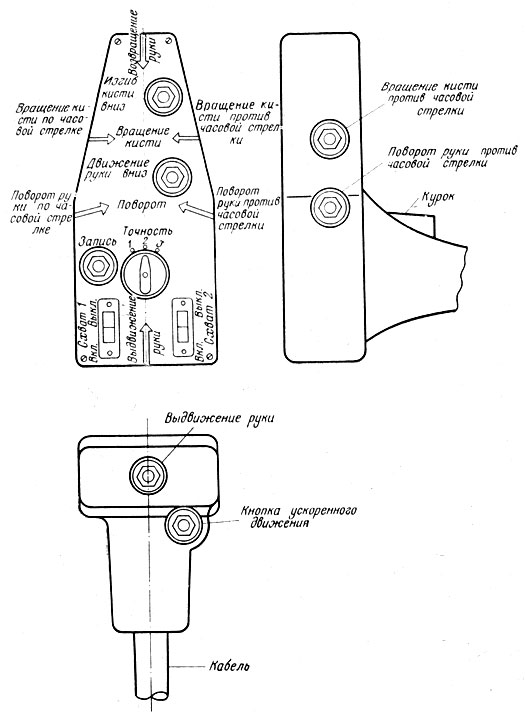
Фиг. 5.4. Пульт ручного управления
А. Во время работы в режиме обучения руку с помощью пульта ручного управления перемещают через заданные позиции; обучение робота производится в следующем порядке:
- Переключатель режима работы на панели управления ставится в положение "обучение".
- Выбирается номер программы и устанавливается номер шага программы. Установка номера программы и номера шага программы производится с помощью селектора программ и селектора шага программ на панели управления. Объем памяти разделен на три программы, обозначенные цифрами 1, 2, 3, каждая из которых может содержать по 60 шагов. В каждую из них можно записать определенную последовательность операций. Счетчик шагов программы показывает номер каждого шага программы, включенной селектором. При каждом нажатии кнопки селектора шага слева на панели последовательно сменяются номера шагов программы. При нажатии кнопки возврата в исходное положение осуществляется установка на нуль. Программа операций вводится в память последовательно в соответствии с последовательностью перемещения руки, начиная с первого шага.
- С помощью переключателей пульта ручного управления рука позиционируется в том положении, координаты которого нужно занести в память. На пульте ручного управления имеется группа следующих переключателей, которыми можно свободно управлять рукой (фиг. 5.4): радиальное возвратно-поступательное движение руки вперед и назад; вертикальное движение вверх и вниз - поднятие и опускание руки; поворот по часовой и против часовой стрелки - поворот руки вправо и влево; кисть: наклон вверх и вниз - движение кисти вверх и вниз; кисть: поворот вправо и влево - движение вправо и влево; схват 1: открыт - закрыт - зажим и разжим схвата; схват 2: включено - выключено - формирует сигналы "включено - выключено" для предварительного движения схвата; курок - переключатель, разрешающий использование пульта ручного управления; при его нажатии возможно включение других переключателей; кнопка ускоренного перемещения - переключатель ускоренного движения руки и кисти; при одновременном нажатии ее с другими кнопками рука и кисть осуществляют движение с увеличенной скоростью.
- Перед проведением записи программы должны быть сделаны следующие переключения: а) Установка точности позиционирования: переключателем "Точность" пульта ручного управления устанавливается любой из уровней точности 1, 2, 3 (об уровнях точности см. ниже). Точность на уровнях 2 и 3 можно непрерывно менять при помощи регуляторов, расположенных сбоку панели управления. б) Установка скорости движения: переключатель "Скорость записи" на панели управления устанавливается в положение "Нормально" или "Замедленно". При положении "Нормально" скорость движения во время воспроизведения будет постоянной. При положении "Замедленно" можно менять скорость во время воспроизведения поворотом рукоятки, имеющей шкалу. Таким образом, есть возможность выбирать один из двух режимов скорости движения при воспроизведении. в) Включение подачи и приема внешних сигналов: это означает либо передачу сигналов к внешним устройствам, либо прием сигналов от них; прием и передача внешних сигналов включаются при помощи соответствующих переключателей ОХ 1-ОХ 6, WX 1-WX 6. Установка "Включено" означает готовность к передаче и приему. Что касается количества внешних связей, то стандартные модели имеют по три цепи, но число их может быть увеличено до 6. Кабель для передачи и приема сигналов подключается к разъему, расположенному сбоку блока управления. г) Установка временной задержки: определяется необходимость создания временной задержки в данном положении. Задержка вводится при установке переключателя "Запись временной задержки" в положение "Включено". Время задержки устанавливается при помощи "регулятора", находящегося под указанным переключателем (допускает изменения во время воспроизведения). д) Определение моментов подачи сигналов на включение схвата: подача сигнала определяется положением переключателей 1 и 2 на пульте ручного управления. е) Определение количества шагов: исходя из показаний счетчика "шагов программы", определяется число шагов.
- В барабан блока памяти вводятся координаты руки и условия, перечисленные в п. 4. При нажатии на пульте ручного управления кнопки "Запись" в барабан памяти - в программу, соответствующую положению селектора программы, и в соответствующий шаг программы, номер которого указан на шкале счетчика, - будут внесены координаты положения руки (5 координат положения) и условия, перечисленные в п. 4 (эти действия называют обучением). В процессе обучения шаги программы автоматически переключаются по одному.
- Повторяются действия, указанные в пп. 3, 4 и 5, и на барабане записываются координаты заданных положений руки (составление программы работы).
- По окончании программы следующим шагом вводят в запоминающее устройство сигнал "конец программы". Переключатель "Конец программы" на панели управления ставится в положение "Включено" и нажимается кнопка "Запись".
Б. Во время работы в режиме воспроизведения последовательно воспроизводятся шаги программы, записанные в блоке памяти.
- Переключатель "Режим работы" на панели управления ставится в положение "Воспроизведение".
- Выбирается программа операций. При положениях 1, 2, 3 переключателя селектора программ в память вводятся разные программы, поэтому рычаг селектора следует установить на ту программу операции, которую нужно воспроизвести.
- Устанавливается скорость движения во время воспроизведения. Ее установка производится переключателем "Скорость повторения" и рукояткой регулирования медленной скорости. Такая регулировка скорости возможна, если программирование производилось при установке переключателя скорости режима обучения в положение "Замедленно".
- При первом воспроизведении выполняется пошаговая проверка записанной программы. При нажатии кнопки "Начало цикла" и кратковременной установке переключателя "Шаг" в положение "Следующий шаг" записанная программа будет воспроизводиться рукой по" одному шагу.
- Далее проверяется непрерывное воспроизведение. Если переключатель "Шаг" повернуть в положение "Автоматически", последовательные шаги отрабатываются непрерывно. В этом случае траектория движения руки различна в зависимости от заданного уровня точности и скорости движения, которую во время воспроизведения можно менять. Регулировочные рукоятки дают возможность в пределах допустимых изменений получать оптимальные значения регулируемых величин.
- Непрерывное воспроизведение программы роботом "Юнимейт". Если переключатель "Повторение цикла" установлен в положение "Непрерывно", робот будет непрерывно повторять операции, если же он установлен в положение "Один раз", будет выполнен только один цикл.
- Остановка. Движения руки прекратятся, если нажать кнопку "Стоп" или ручку переключателя "Движение" повернуть в положение "Остановка". Ручка переключателя обычно стоит в положении "Движение".
В. Корректировка программы операций. Поправки в программу робота вносят путем переключения режима работы на обучение и проведения перезаписи информации о положении руки и других условиях на тех шагах программы, которые следует исправить.
Г. Выбор уровня точности позиционирования. Если путь из точки А в точку С проходит через точку В, как показано на фиг. 5.5, можно изменять траекторию движения из А в С путем изменения уровня точности позиционирования в точке В.
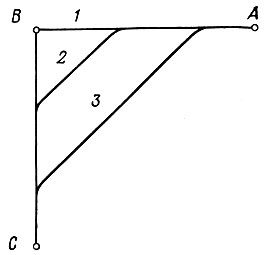
Фиг. 5.5. Траектория движения при разных уровнях точности
Уровень 1: рука проходит через точку В, огибая прямой угол;
Уровень 2: рука не доходит до точки В и (незначительно срезает угол;
Уровень 3: рука срезает угол и, перемещаясь по более короткому пути, быстрее достигает точки С.
Время выполнения операций, для которых не требуется высокая точность, можно уменьшить за счет сокращения пути между некоторыми точками. Точность на уровнях 2 и 3 можно непрерывно менять при помощи регуляторов (2 соответствует 30%, 3 - 50%). Уровень точности устанавливают переключателем "Точность" на пульте ручного управления.
Д. Пример составления программы. Объяснения здесь даются на примере" операций, когда, как показано на фиг. 5.6, деталь берется с конвейера, обрабатывается на станке I и оставляется на станке II.
Подробнее технологический процесс состоит в следующем:
- Рука робота "Юнимейт" ждет над точкой А конвейера.
- Получив сигнал о подаче детали в точку А, рука берет деталь.
- Рука робота переносит деталь в точку В на станке I и останавливается на определенный промежуток времени. Во время этой остановки станок I обрабатывает деталь.
- Рука робота переносит деталь в точку С перед станком II и подает сигнал на открытие предохранительной дверцы.
- Получив сигнал об открытии щитка, рука робота кладет детадь в точку D.
- Рука робота вновь идет в пункт ожидания над точкой А, чтобы снова взять деталь.
Фиг. 5.6. Пример применения робота 'Юнимейт'
Эти движения, еще более детализированные, приведены в табл. 5.1 в форме стандартной программы робота "Юнимейт".
![Таблица 5.1. Программа робота 'Юнимейт'. [C] - зажим; [UC] - разжим; [TD] - временная задержка; [NR] - нормально; [SL] - замедленно; [R] - поворот; [D] - вниз-вверх; [O] - вперед-назад; [B] - изгиб кисти; [S] - вращение кисти; [NC] - постоянная нормальная скорость; [SC] - постоянная пониженная скорость; [NV] - переменная нормальная скорость; [SV] - переменная пониженная скорость](pic/000029.jpg)
Таблица 5.1. Программа робота 'Юнимейт'. [C] - зажим; [UC] - разжим; [TD] - временная задержка; [NR] - нормально; [SL] - замедленно; [R] - поворот; [D] - вниз-вверх; [O] - вперед-назад; [B] - изгиб кисти; [S] - вращение кисти; [NC] - постоянная нормальная скорость; [SC] - постоянная пониженная скорость; [NV] - переменная нормальная скорость; [SV] - переменная пониженная скорость
"Юнимейт" программируется так, как указано в разделе "Запоминание программы". В разделе "Воспроизведение программы" описаны действия робота "Юнимейт" во время воспроизведения. Время работы робота "Юнимейт" может быть рассчитано.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'