7.4. Групповое управление роботами
Как уже указывалось в разделе о наблюдаемых в робототехнике тенденциях, в недалеком будущем предполагается провести исследования по практическому использованию группы роботов с обучением, управляемых одной мини-ЭВМ.
1) Методы управления. В общем виде блок-схема системы группового управления роботами приведена на фиг. 7.15. В зависимости от роли, выполняемой ЭВМ, групповое управление роботами можно разделить на три вида.
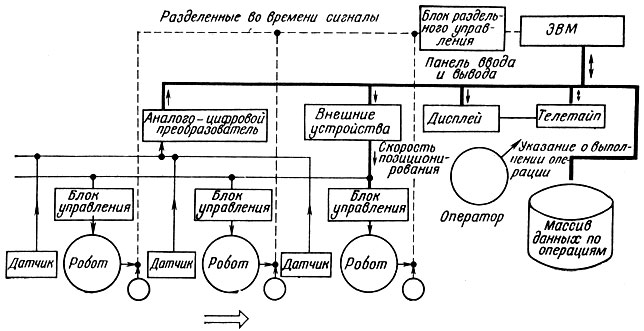
Фиг. 7.15. Групповое управление роботами
а) Управление по программе, записанной в режиме обучения. Программы управления роботами записаны во внешнее запоминающее устройство вычислительной машины. В зависимости от вида изделий, поступивших на линию обработки, из памяти машины извлекаются те или иные программы управления роботами. Обучение роботов можно осуществлять как с помощью ручного управления, так и с помощью программирования на простом языке, подобном языку МЭНТРАН.
б) Управление с обратной связью от тактильных датчиков. При таком управлении расширяются технологические возможности роботов. Управление осуществляется способом, указанным в п. 2 разд. 7.3, от одной ЭВМ, работающей в режиме разделения времени.
в) Управление с распознаванием образов. ЭВМ при необходимости принимает и обрабатывает информацию от телевизионных камер и тактильных датчиков, расположенных на всех роботах. Путем соответствующей организации участка, на котором эксплуатируется робот, процесс распознавания можно существенно упростить.
2) Особенности и проблемы группового управления. В будущих исследованиях методов группового управления должны быть изучены следующие вопросы:
- повышение возможностей роботов за счет совершенствования взаимодействия установленных на них датчиков и ЭВМ;
- групповое управление различными по конструкции роботами;
- простота обучения робота и изменения программ управления;
- расширение видов операций, записываемых в блоках памяти;
- возможность выполнения комплекса различных операций, включая операции контроля.
Важное значение имеет анализ экономической стороны группового управления. При групповом управлении стоимость мини-ЭВМ следует оценивать в расчете на один робот, так что она окажется не столь уже большой. Существенным является снижение стоимости внешних преобразовательных устройств за счет их стандартизации.
В любом случае независимо от расходов, связанных с созданием систем группового управления, такие системы следует использовать для автоматизации сложных технологических процессов, обслуживаемых в настоящее время большим числом рабочих. При проектировании систем группового управления нельзя цепляться за старые традиции и пытаться сохранить существующие производственные линии, не меняя используемого на них оборудования.
В дальнейшем будут совершенствоваться как сами роботы, так и другое технологическое оборудование, что откроет возможность обслуживания такого оборудования роботами простой конструкции. Постоянно будут совершенствоваться также производственные линии.
В заключение следует отметить, что робототехника еще очень молода и переживает период бурного развития. Поэтому вполне вероятно, что роботы, с которыми читателю вскоре придется столкнуться на практике, будут существенным образом отличаться от роботов, описанных в данной книге.
- Цудзи С, Дзёхо сёри, 11, № 8, 467-475 (1970).
- Цудзи С, Дзёхо сери, 7, № 8, 919-928 (1968).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'