7.3. Исследования в области интеллектуальных роботов
Глубокие исследования в области интеллектуальных роботов ведутся в Массачусетском технологическом институте и в Стэнфордском университете (США). В Японии, как уже указывалось, подобные исследования ведутся в Институте комплексных исследований электронной техники, Центральной исследовательской лаборатории фирмы "Хитачи" и других учреждениях. Целью всех этих исследований является обеспечение практического применения интеллектуальных роботов.
Ввиду ограниченности объема в данном разделе будет дано лишь краткое общее описание роботов и будут вкратце рассмотрены вопросы их применения. Подробнее с этими проблемами можно ознакомиться в специальной литературе [1,2].
Блок-схема интеллектуального робота показана на фиг. 7.1.
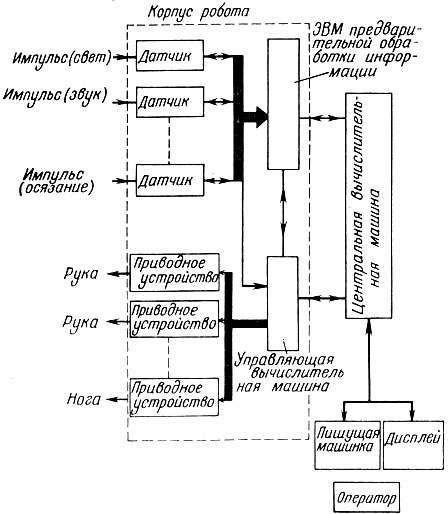
Фиг. 7.1. Блок-схема интеллектуального робота
Роль мозга в нем играет центральная ЭВМ, функции органов зрения выполняют телевизионные камеры и специальные ЭВМ, органов слуха - микрофоны и специальные ЭВМ, руки представлены конструкциями с несколькими степенями свободы, снабженными тактильными датчиками, а органами передвижения являются колеса.
Перемещения рук и самого робота на колесах осуществляются по сигналам, поступающим к исполнительным системам от центральной ЭВМ. Робот может выполнять простые операции и отрабатывать несложные команды: отбирать из разбросанных по полу кубиков только наперед заданные, укладывать их один на другой. Однако для выполнения даже такой простой на первый взгляд работы потребовалась довольно мощная ЭВМ с большим объемом памяти. Память выполнена на магнитных (ферритовых) сердечниках. Емкость памяти - 260 К слов.
1) Зрительная система. Зрение позволяет человеку выполнять сложные операции. Подобно этому и возможности робота при снабжении его органами зрения резко возрастают. От органов зрения требуется выполнение более сложных функций, чем распознавание простых образов, подобных буквам алфавита.
При рассмотрении ряда технологических процессов обнаруживается довольно много случаев, когда можно обойтись сравнительно простой конструкцией органов зрения. В подобных случаях функции органов зрения сводятся к установлению наличия или отсутствия объекта, определению его местоположения, его классификации по предварительно установленным простым признакам и т. д. Системы для реализации этих функций содержат фотоэлементы, телекамеры, разнообразные осветительные установки и сравнительно простые электронные схемы.
Необходимые органам зрения функции определяются видом обслуживаемого технологического процесса. Однако подобным зрительным системам свойственны определенные ограничения; поэтому обойтись этими простейшими функциями глаза можно лишь при условий упорядочения обстановки, в которой выполняется операция, а также содержания самой операции.
Наиболее важной проблемой при создании интеллектуальных роботов является разработка глаза, способного до некоторой степени различать простые объекты. Одной из таких разработок является глаз робота Института комплексных исследований электронной техники, который в дальнейшем предполагается применить в промышленности.
На фиг. 7.2 приведена блок-схема указанной системы. Как видно из приведенного описания, большая часть обработки информации осуществляется на ЭВМ модели NEAC-3100. В рамках данного исследования определялась возможность объемного распознавания предметов при условии введения некоторых ограничений. В условиях производства не представляет труда изменить расположение объектов таким образом, чтобы глаз робота мог их распознать. С помощью ЭВМ направленность освещения регулируется так, чтобы и фон и объект стали монохромными. Это упрощает процесс распознавания. Что касается формы предметов, то разработчики системы старались иметь дело с простыми трехмерными предметами, ограниченными плоскостями, цилиндрическими поверхностями и т. п.
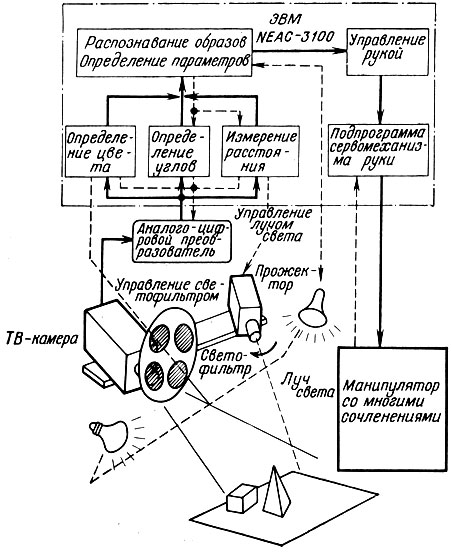
Фиг. 7.2. Блок-схема зрительной системы робота
В качестве устройства ввода используются промышленные телевизионные камеры. При проведении экспериментов по распознаванию цветов свет, попадающий на вход в телевизионную камеру, предварительно пропускается через красно-зелено-синие фильтры, установленные на вращающемся диске. С целью экономии объема памяти сигналы от телевизионной камеры преобразуются в аналого-цифровом преобразователе в сигналы двух видов. Аналогичное явление происходит и в органе зрения человека. Как показано на фиг. 7.3, глаз имеет область с высокой разрешающей способностью в пределах ±1° от центра сетчатки, остальная же поверхность сетчатки имеет небольшую разрешающую способность.
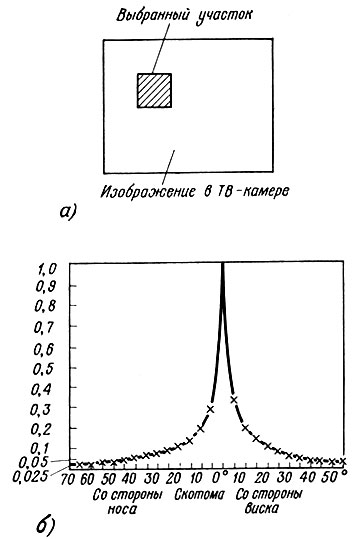
Фиг. 7.3. Выделение зоны и распределение остроты зрения по сетчатке. а - выделенная зона на ТВ-изображении; б - распределение остроты зрения по сетчатке
Поле зрения телевизионной камеры делится на 64 X X 64 = 4096 точек, яркость каждой из которых преобразуется в цифровой сигнал, направляемый в ЭВМ. На основании полученной информации определяется местонахождение предмета. Далее, с целью более подробного изучения формы предмета, выявленная зона делится снова на 4096 участков (заштрихованная зона на фиг. 7.3, а). Косыми линиями производится сканирование этой зоны с последующим аналого-цифровым преобразованием полученных сигналов. В случае когда объект больше выделенной зоны, она перемещается подобно тому, как человек скользит взглядом по предмету.
а) Вычисление линейного плана (определение проекции на плоскость в виде контурного изображения). Первая стадия обработки информации состоит в том, что на основании видеосигналов, поступающих от телевизионной камеры, определяются положения углов предмета и составляется линейный план предмета. Исходя из того, что обычно на линии пересечения плоскостей резко меняется яркость отраженного света, рассчитывают пространственный дифференциал яркости изображения в целом.
Однако яркость на плоскости неодинакова, и во вводимой информации присутствует много помех. Поэтому в случае, когда яркости двух плоскостей близки, угол между ними трудно определить. В таком случае применяют пространственный фильтр, который представляет собой как бы эталон обычного зрительного восприятия изображения. Искомый угол находят тогда путем сравнения изображений, полученных с телекамеры и с фильтра. Пространственный фильтр 7x7, применявшийся в процессе исследований глаза робота Стэнфордского исследовательского института, показан на фиг. 7.4. Подгонка коротких отрезков линий осуществляется с помощью вычислительной машины Хайбридж. На фиг. 7.5 показаны контурные изображения прямоугольников, полученные в результате моделирования на ЭВМ.
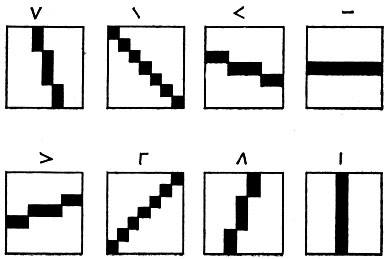
Фиг. 7.4. Пространственный фильтр, в котором в качество unnP'u использована клетка зрительной системы кошки (пo Форсену). Выявляются отрезки в восьми направления
Фиг. 7.5. Определение контуров прямоугольника (по Форсену). а - дифференцирование пространства; б - изображение после фильтра моделирующего глаз кошки
Для предметов сложной формы эффективным является метод, при котором направление освещения регулируется при помощи вычислительной машины и полученные после этого контурные изображения теоретически комбинируются. Реальный пример вычисления правильного контурного изображения, полученного из четырех незавершенных изображений, приведен на фиг. 7.6.
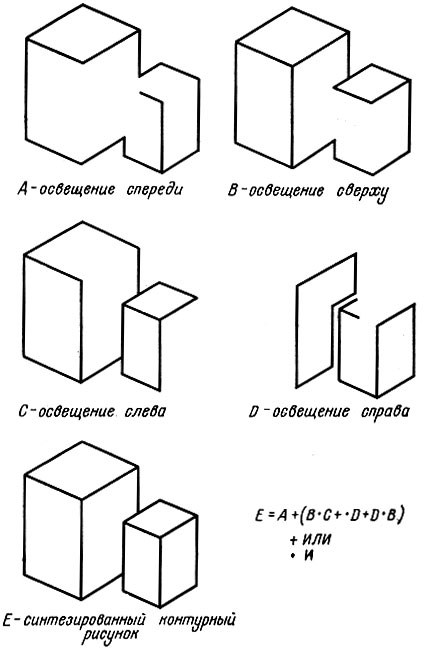
Фиг. 7.6. Синтез контурного изображения в результате поочередного освещения предмета с четырех сторон (по Сираи)
б) Распознавание цвета. Цвет наряду с информацией о яркости и линейных размерах является важным свойством, облегчающим распознавание предмета. Восприятие цвета не зависит от угла освещения и расстояния. Используя это свойство, можно быстро найти контуры предмета.
В ЭВМ вводится видеосигнал изображения, прошедший через красно-зелено-синие светофильтры, и по нему определяют цветовые признаки каждой из точек. Поскольку проверка всех точек изображения требует слишком много времени, разрабатывается алгоритм, сокращающий процесс обработки информации. На фиг. 7.7 показан предмет, состоящий из кубиков шести цветов. На определение цвета одного кубика потребовалось 0,06 с.
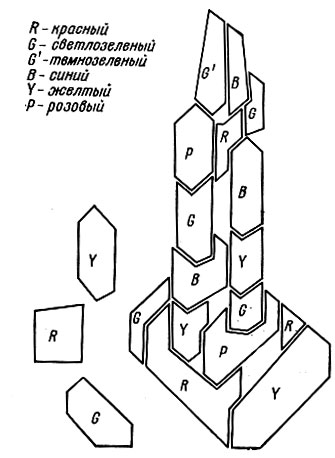
Фиг. 7.7. Пример распознавания цвета
в) Измерение расстояния. Наряду с определением формы предмета робот должен установить его размеры и местоположение. Для измерения расстояний предлагаются следующие методы:
1) Метод с использованием одного глаза. Точки на плоскости, расположенные в поле зрения телекамеры, соответствуют точкам телевизионного изображения. Следовательно, если предварительно произвести настройку, можно по координатам х, у установить местонахождение точек на плоскости.
С использованием этого метода во многих работах по координатам х, у телевизионного изображения определяют координаты всех точек на горизонтальной рабочей платформе, высота которой известна. Высота предмета определяется в направлении, перпендикулярном рабочей платформе. Используемая аппаратура проста, но ей свойствен ряд ограничений при измерении расстояний. Данный метод непригоден для роботов, работающих в полярной системе координат.
2) Стереометод заключается в том, что используется пара телевизионных камер и расстояние до объекта измеряется с помощью тригонометрических функций по данным о положении объекта, об угле и расстоянии от одной из камер. Сложным при этом методе оказывается выяснение вопроса о том, каким точкам одного из изображений соответствует каждая из точек другого изображения. Для того чтобы рассчитать расстояние до правого и левого изображений, Сутро устанавливал в поле зрения небольшую рамку, называемую окном, и передвигал одну из ее сторон таким образом, чтобы разница расстояний до изображений была минимальна.
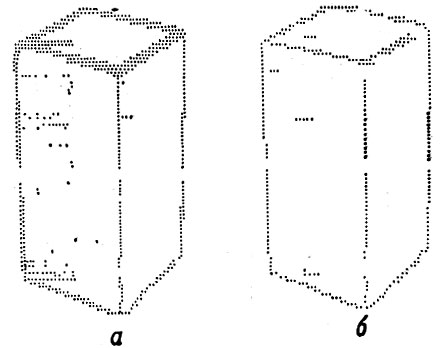
3) Дальномере осветительным устройством. Расстояние до предмета можно измерить путем применения телевизионной камеры совместно с осветительным устройством. На фиг. 7.8 показан этот принцип. Телевизионная камера фиксирует предмет, на который проецируется пучок света; если предмет находится в точке Л, на изображении освещается точка Р, если в точке А' - точка Р'. Следовательно, с помощью тригонометрических измерений можно определить расстояние до предмета. Для ускорения процесса измерения расстояния до каждой точки, находящейся в поле зрения, делаются попытки распознавания предметов, проецируя на них движущуюся узкую полосу света. На фиг. 7.9 в качестве примера показан предмет, очертания которого определены путем обработки на ЭВМ изображений, полученных с помощью такого метода. На фигуре хорошо видны горизонтальные и вертикальные плоскости предмета.
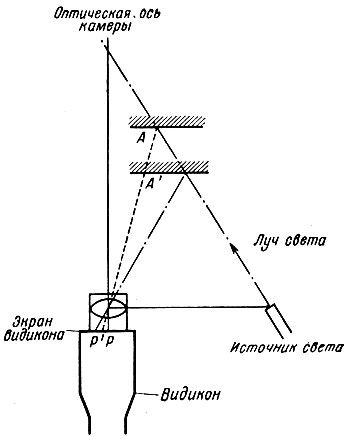
Фиг. 7.8. Принцип измерения расстояния
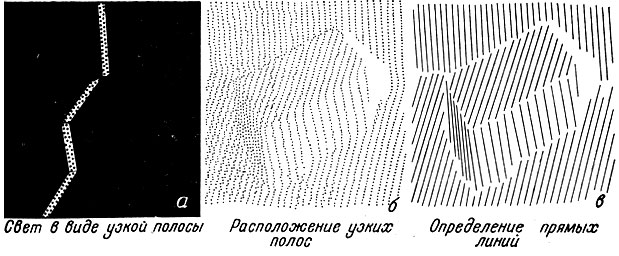
Фиг. 7.9. Обработка информации, полученной при проецировании на предмет узких полос света. а - узкая полоса света; б - конфигурация полос; в - выявление прямых линий
г) Распознавание. Линейный план, цвет, расстояние и другие характерные признаки являются исходной информацией для программы, по которой осуществляется распознавание объектов. Существуют два основных метода распознавания объектов. При первом методе о форме объекта судят по конкретной комбинации характерных признаков, о которых сказано выше, при втором методе распознавание осуществляется сравнением объекта с прототипом.
Большой интерес представляет робот, разработанный Центральной исследовательской лабораторией фирмы "Хитачи", который ведет сборку по чертежу.
2) Управление рукой с помощью ЭВМ. В результате недавних исследований разработана система управления с обратной связью от датчиков, размещенных на руке робота. Информация от датчиков обрабатывается мини-ЭВМ. Создание такой системы значительно расширило возможности робота.
а) Управление с обратной связью от датчиков, размещенных на руке. Ранее рассматривалась система управления роботом, в которой информация о перемещениях руки в рабочем цикле находится в блоке памяти, причем эта информация была записана в блок памяти при обучении робота (фиг. 7.10). Такая система обеспечивает высокую точность лишь при фиксированном положении робота и окружающих его объектов. Всякое же изменение относительного расположения робота и объею-тов при отсутствии датчиков, размещенных на руке робота, вызывает погрешность.
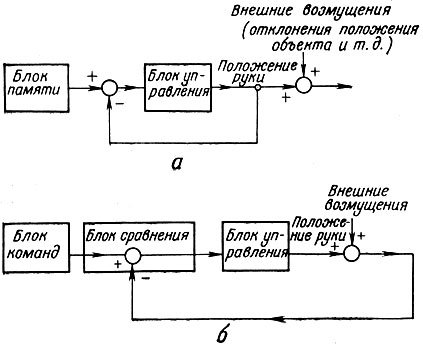
Фиг. 7.10. Способы управления рукой робота. а - управление с разомкнутым контуром; б - управление с замкнутым контуром
Между управлением рукой робота и управлением рукой человека имеются очевидные различия. Руке человека свойственны большие погрешности в отработке конкретных величин перемещения. Так, приказ "передвинуть руку на 10 см" человек выполнит с погрешностью в несколько миллиметров. Однако при манипулировании предметом рука человека имеет более высокую точность, чем рука робота с обучением. Это объясняется приобретенными человеком навыками и наличием обратной связи от объекта.
Для осуществления управления с обратной связью от объекта необходимо снабдить робот элементом, чувствительным к давлению и размещенным непосредственно на пальцах руки. По сигналам от такого элемента ЭВМ должна корректировать программу управления рукой. Использование датчиков, придающих пальцам руки чувство осязания, делает возможным и ряд других способов управления рукой робота. Один из таких способов, разработанный в последнее время, приведен ниже.
б) Управление с участием человека. В Массачусетсом технологическом институте Эрнст и Шеридан с сотрудниками провели исследования в области дистанционного управления роботами. Целью исследований явилось обеспечение возможности управления роботом, находящимся на Марсе, Луне или другой планете, при передаче ему минимального количества информации. Человек с Земли дает роботу указания на простом языке, близком к естественному. Эта информация расшифровывается с помощью размещенной на роботе мини-ЭВМ и приводит робот в действие. У робота нет органов зрения и невелики возможности в части обработки информации. В непредусмотренной ситуации робот обращается к помощи человека на Земле и действует по его указаниям. Такой способ управления получил наименование управления с участием человека и под его наблюдением (supervisory control).
Диалог между человеком и роботом в этой системе выполняется на алгоритмическом языке МЭНТРАН (MANTRAN).
Робот (фиг. 7.11) построен на базе копирующего манипулятора модели 8 фирмы AMF и имеет 7 степеней свободы. В качестве приводных используются шаговые электродвигатели. В пальцах робота смонтировано 10 датчиков давления, каждый из которых работает на свою триггерную схему. В системе управления используется ЭВМ PDP-8 компании DEC, имеющая память в 4К слов.
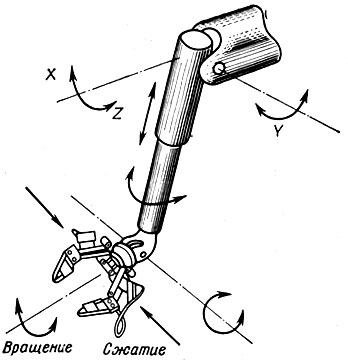
Фиг. 7.11. Многостепенный манипулятор (по Барберу)
Оператор составляет программу диалога на языке МЭНТРАН, используя простые слова, близкие к английским. Пример такой программы приведен на фиг. 7.12. Программой роботу определяется задача: найти в помещении предмет и перенести его в указанное место LOC 2.
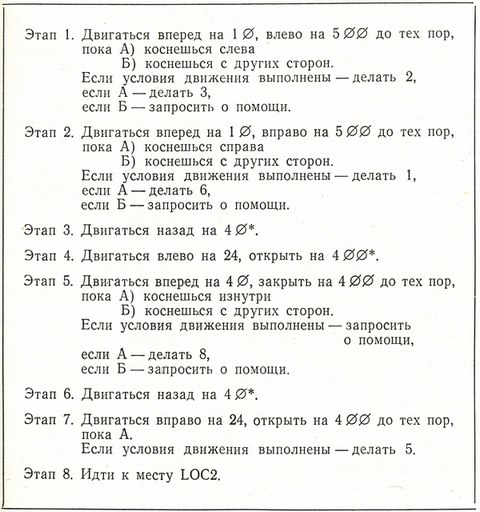
Фиг. 7.12. Пример программы MANTRAN ('Ищи предмет и, если он имеется, отнеси его в LOC 2') (по Барберу)
Поскольку у робота нет органов зрения, он обыскивает помещение наощупь и обнаруживает предмет с помощью тактильных датчиков, сообщающих ему чувство осязания (фиг. 7.13). Рука робота вначале несколько отодвигается от предмета. Затем пальцы раскрываются и, вновь продвинувшись вперед, робот захватывает предмет и переносит его в указанное место.
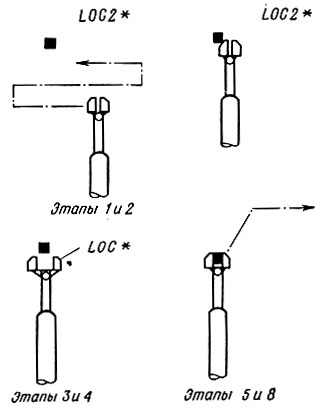
Фиг. 7.13. Движения руки по программе на фиг. 7.12 (по Барберу)
Можно усложнить программу, заставив робот определить форму и размеры простого предмета, взять его за определенную часть (например, за ручку) и перенести в указанное место. Следует отметить, что возможности манипулятора повышаются при использовании его в сочетании с мини-ЭВМ.
Принцип управления, подобный описанному выше, ыл применен Сато с сотрудниками в Институте комплексных исследований электронной техники для управления манипулятором со многими степенями свободы. В таком манипуляторе по координатам перемещения пальцев должны быть определены координаты перемещения всех сочленений, так что объем вычислений, приходящихся на средства программного управления, значительно возрастает.
в) Сервоуправление с отражением усилия. Иноуэ из Института комплексных исследований электронной техники с помощью манипулятора, подобного показанному на фиг. 7.11, в сочетании с мини-ЭВМ CLOAP-2000E (4К слов) доказал возможность еще одного, более совершенного способа управления роботом. При этом, как показано на фиг. 7.14, производится предварительный расчет приложенного к руке робота момента, исходя из отклонения каждого сочленения руки от исходного положения. Используя эту информацию, ЭВМ осуществляет управление каждым сочленением. Благодаря этому новому способу управления, который, безусловно, имеет большую будущность, стало возможным выполнение следующих операций:
- различение веса захваченных предметов;
- определение того, коснулся ли захваченный предмет других предметов;
- введение штифтов в отверстия;
- вращение кривошипных механизмов.
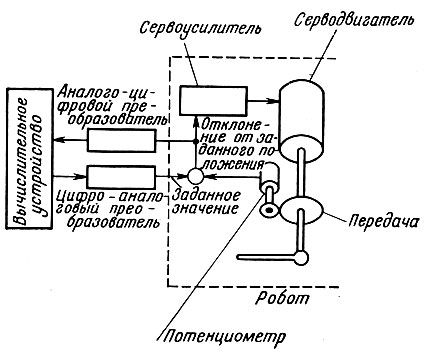
Фиг. 7.14. Сервомеханизм с отражением усилия (по Иноуэ). Момент нагрузки пропорционален отклонению от заданного положения, что дает информацию о приложенном к руке робота моменте.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'