9.4. Исполнительные механизмы
1) Общий обзор. Под исполнительными механизмами здесь понимаются узлы, соответствующие мускулам, приводящим в движение руки и ноги человека, управляемые при помощи выходных сигналов от управляющих устройств и выполняющие рабочие движения. Авторы касаются только тех исполнительных механизмов, необходимых в промышленных роботах, которые в настоящее время можно приобрести и использовать.
По источникам энергии исполнительные механизмы можно подразделить на следующие три типа: гидравлические, в которых применяется жидкость, например вода; пневматические с применением газа, например, воздуха; электрические, преобразующие электрическую энергию в механическую. Косвенным образом основным источником питания механизмов как гидравлического, так и пневматического типа также является электричество, но они классифицируются здесь по видам непосредственно используемой энергии. Кроме того, имеются приводные устройства электромагнитного типа, в которых электрическая энергия преобразуется в энергию прямолинейного движения исполнительного звена. Однако подобные механизмы здесь не рассматриваются, поскольку они встречаются крайне редко.
В некоторых случаях применяют один из трех названных выше типов механизмов, иногда же их комбинируют. Выбор такой комбинации определяется функциями робота и позволяет более эффективно использовать его характеристики. Здесь подобные гибридные системы не рассматриваются. Часто бывает, что вид энергии, используемой в управляющем устройстве, отличается от вида энергии, используемой в исполнительном механизме. Поэтому требуется преобразователь, превращающий выходные сигналы управляющего устройства в желаемую форму входных сигналов исполнительного механизма. Такие преобразователи явились объектом исследования и рассматриваются в данном разделе ка] приборы, необходимые для. исполнительных механизмов робота.
При написании данного раздела авторы ставили себе целью изложить сведения, которые можно непосредственно использовать при конструировании и изготовлении роботов. Эти сведения были отобраны из каталогов и различного рода публикаций. Но, поскольку каждая фирма по-разному сообщает о технических данных, моделях и типах своих изделий, отбирались только Основные данные. Кроме того, при составлении таблиц главное внимание обращалось на обобщение данных, касающихся устройств с большим отношением входной и выходной мощности, с большой выходной мощностью, высокой точностью и разрешающей способностью, с большим .количеством движений, совершаемых одновременно, малогабаритных устройств и т. д.
Часто изготовители не сообщают точных сведений о надежности приборов и механизмов, которые считаются наиболее важными для промышленных роботов. Поэтому не было возможности привести эти данные в таблицах. От изготовителей аппаратуры требуется, чтобы они сообщили дополнительно сведения о надежности изделий. Не было также сведений о стоимости изделий при поставке. По этому поводу желательны непосредственные запросы.
2) Преобразователи сигнала. Преобразователь сигнала - это устройство, в котором выходной сигнал управляющего устройства преобразуется в такую форму входного сигнала, которая требуется в соответствии с типом, моделью, мощностью и другими параметрами исполнительного механизма. По функциям их можно классифицировать различным образом.
- Классификация по типу используемой энергии сигнала: электрические, пневматические, гидравлические, механические.
- Классификация по форме сигналов: аналоговые (постоянного тока, переменного тока, напряжения, смещения, угла и т. д.) и цифровые.
- Классификация по величине сигнала: вольты, амперы, диапазон давления, диапазон смещения, величина импульса и т. д.
В каждом преобразователе отдельно может меняться тип используемой энергии, среда, форма, объем, поэтому их комбинации очень разнообразны. В данной работе в качестве объектов обследования решено было выбрать три вида преобразователей: электромагнитные клапаны, клапанные усилители и сервоклапаны.
а) Электромагнитный клапан. Электромагнитные клапаны делятся на пневматические и гидравлические. Обычно при использовании клапанов, предназначенных для воздуха, требуется осторожность, так как они часто портятся из-за попадания в них содержащейся в воздухе пыли. Поскольку имеется очень много видов электромагнитных клапанов, выпускаемых различными изготовителями, решено было ограничиться классификацией их по функциям соответственно табл. 9.7.
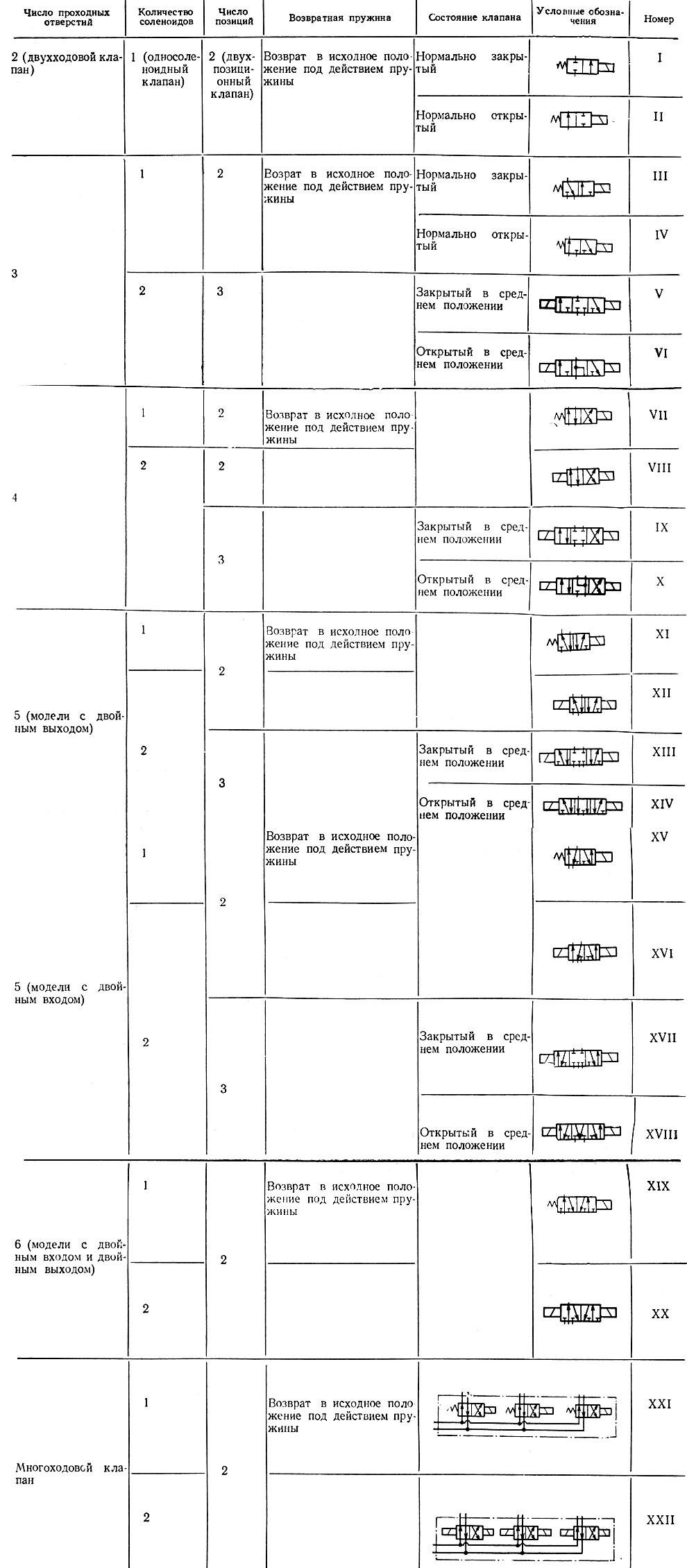
Таблица 9.7. Классификация электромагнитных клапанов по их назначению
При выборе электромагнитных клапанов (необходимо определить следующие моменты:
- источник питания переменного или постоянного тока;
- наличие колебаний напряжения и их величину;
- частоту переменного тока;
- импульсное или непрерывное управление;
- давление и температуру жидкости;
- расход (диаметр отверстия, величину Cv и т. д.);
- окружающую среду при эксплуатации (температура, пыль, агрессивная среда, взрывоопасная атмосфера и т. д.);
- требуемые функции;
- частоту переключения (в Гц, мин-1 и т. д.);
- надежность.
Электромагнитные клапаны, выпускаемые в последнее время, стали вполне надежными и им можно доверять, если предотвратить снижение надежности из-за пыли. Электромагнитные клапаны делятся на управляющие соленоиды и исполнительные клапаны. Соленоид редко становится причиной отказа. Основными причинами поломки бывает коррозия и разрушение клапана. Их можно предупредить путем использования чистого воздуха (без пыли) и применением соответствующих методов смазки. Наблюдается также течь в клапане из-за усталости внутренних пружин и износа резиновых уплотнений, но при регулярном осмотре это можно предупредить.
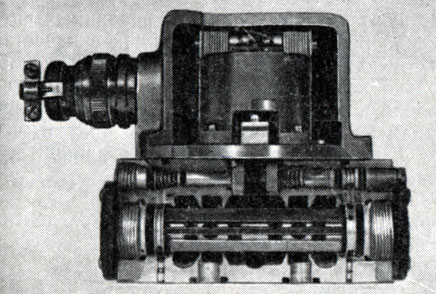
б) Струйно-мембранные усилители. В электромагнитных клапанах осуществляется управление направлением потока сжатого воздуха с помощью электричества, а струйно-мембранные усилители являются устройствами, в которых сигналы крайне низкого давления сжатого воздуха преобразуются в сигналы высокого давления. Известны случаи использования их в комбинации со струйными элементами, однако обычно давление в цепи Управления не превышает 0,1 кг/см2. С момента начала применения такого рода усилителей прошло еще мало времени, данных об их долговечности и условиях эксплуатащии имеется (немного и условия их выбора также еще не вполне ясны.
На фиг. 9.27 показан пример типичной конструкции усилителя. В табл. 9.8 приведены характеристики усилителей с давлением в цепи управления не более 100 мм Н20 (0,01 кг/см2).
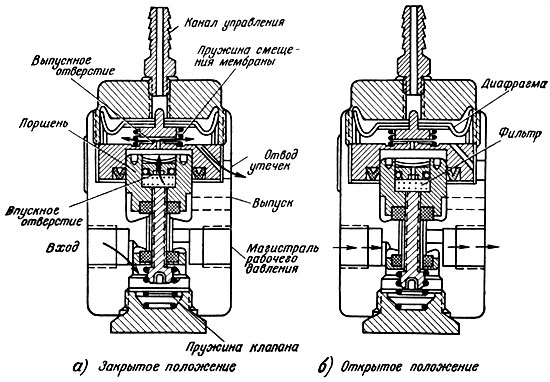
Фиг. 9.27. Клапанные усилители
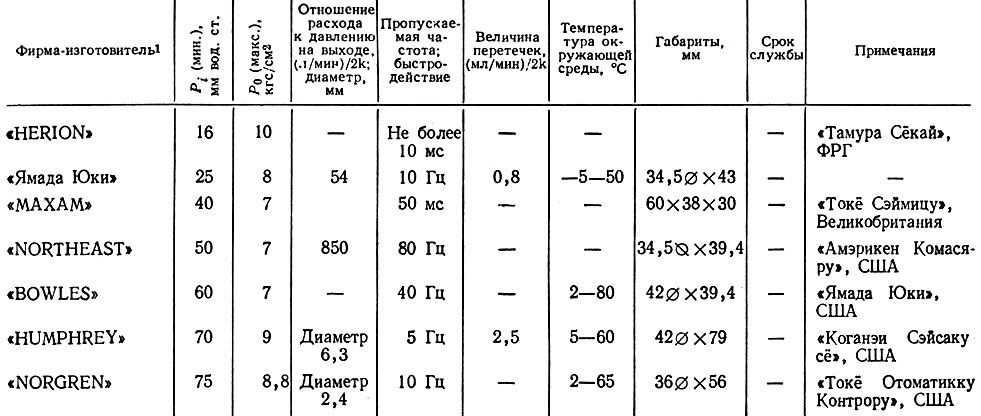
Таблица 9.8. Струйно-мембранные усилители
в) Электрогидравлические преобразователи (сервоклапаны). Электромагнитные клапаны управляют (например, при помощи соленоидов) движением золотника и подают жидкость или газ под высоким давлением в исполнительный механизм. Кроме того, при перемещении золотника могут выполняться только переключения направления подачи рабочего тела по принципу "включено-выключено". В отличие от электромагнитных в элбктрогидравлических преобразователях посредством электромагнита осуществляется перемещение золотника таким образом, что это перемещение оказывается пропорциональным величине входного электрического сигнала. Помимо преобразователей золотникового типа, встречаются конструкции поворотного типа, выполненные в виде кранов, но они довольно редки. Применяются однокаскадные усилители, в которых электромагнит воздействует непосредственно на золотник, и двухкаскадные, где в первом "каскаде усиления обычно используется устройство типа "сопло-заслонка". Электромагнитные клапаны применяются для циклового управления с движением от упора до упора, а преобразователи - для высокоточного позиционирования в заданной точке при движении по сложной траектории.
Сервоклапаны являются элементами пропорционального управления, поэтому в конструкции клапаиа имеется основной контур управления золотником для обеспечения устойчивости золотника преобразователя. При этом по способу обратной связи сервоклапаны можно подразделить на следующие три вида:
- обратная связь с помощью листовой или винтовой юружины и т. д.: клапан управления расходом;
- обратная связь по положению плюс обратная связь по давлению при нагрузке: клапан управления расходом и давлением;
- обратная связь по давлению при нагрузке: клапан управления давлением.
Клапаны управления расходом обычно применяются при позиционном управлении, как в случае промышленных роботов.
При выборе сервоклапанов необходимо уточнить следующие моменты:
- условия нагрузки: максимальное давление в гидросистеме, максимальный расход при приложенной нагрузке, минимальный управляемый расход при приложенной нагрузке, давление и расход при максимальной приложенной нагрузке;
- номинальное давление;
- номинальный расход;
- допустимая величина внутренних перетечек;
- границы изменения величины крутящего момента;
- давление в средней точке - амплитудная характеристика;
- частотная характеристика;
- разрешающая способность.
Подробные сведения по отдельным вопросам можно почерпнуть, например, из журнала "Сэймицу Кикай", т. 30, № 4(1964), где опубликован "Отчет Специального комитета по гидравлической аппаратуре для управления, касающийся сервоклапанов". При выборе сервоклапанов следует обратить особое внимание на условия нагрузки, так как в промышленных роботах требуемый диапазон регулирования расхода при приложении нагрузки велик по сравнению с аналогичным диапазоном в станках и других машинах.
Образец одной из японских конструкций сервокла-лана для управления расходом показан на фиг. 9.28, а характеристики сервоклапанов даны в табл. 9.9-9.12. Кроме того, в табл. 9.13 приведены данные о типичных сервоклапанах.
Фиг. 9.28. Сервоклапан регулирования расхода
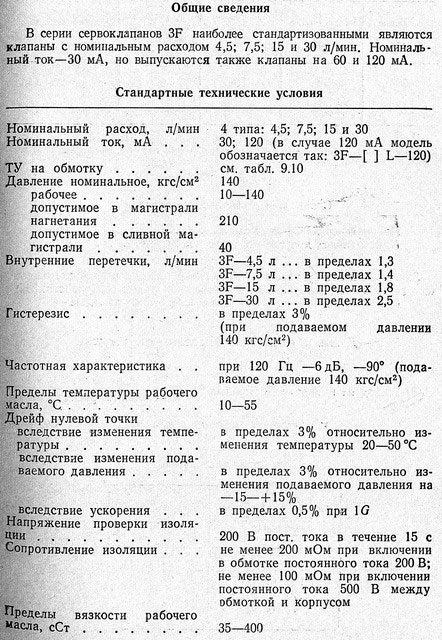
Таблица 9.9. Характеристики сервоклапанов
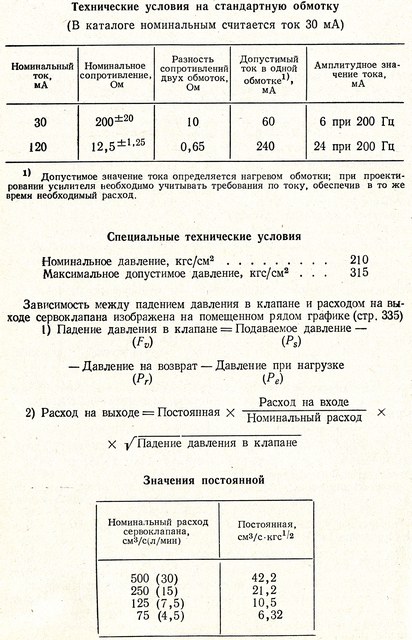
Таблица 9.10
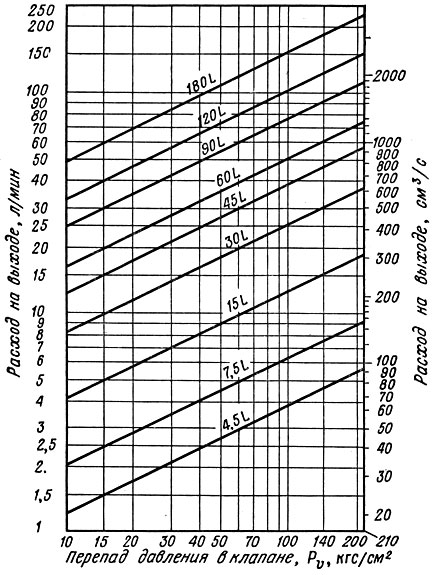
Таблица 9.10. Зависимость между падением давления в клапане и расходом на выходе сервоклапана
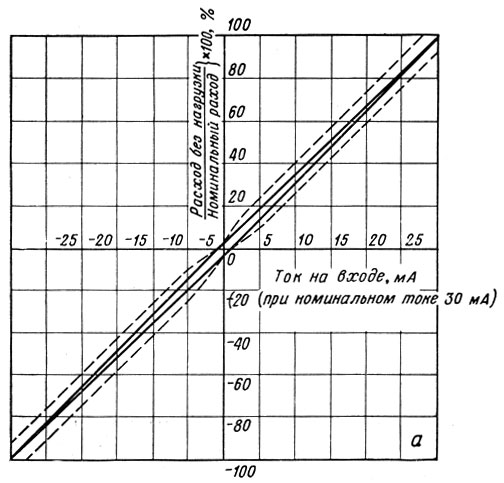
Таблица 9.11. Характеристики расхода без нагрузки
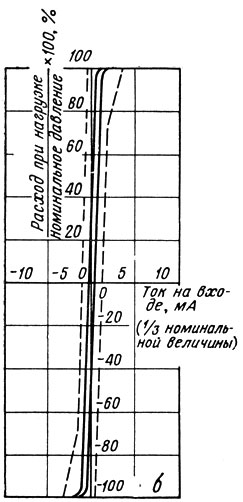
Таблица 9.11. Характеристики коэффициента усили давления
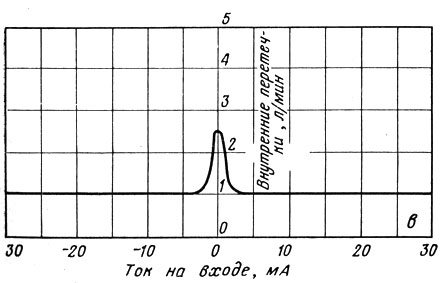
Таблица 9.11. Пример характеристики внутренних перетечес
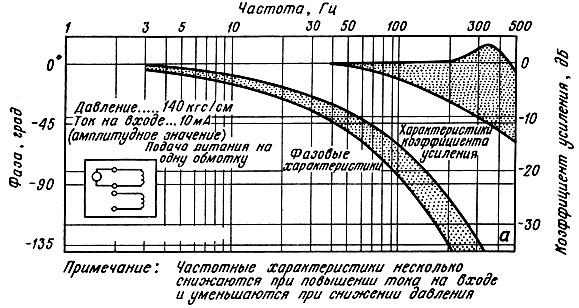
Таблица 9.12. Частотные характеристики
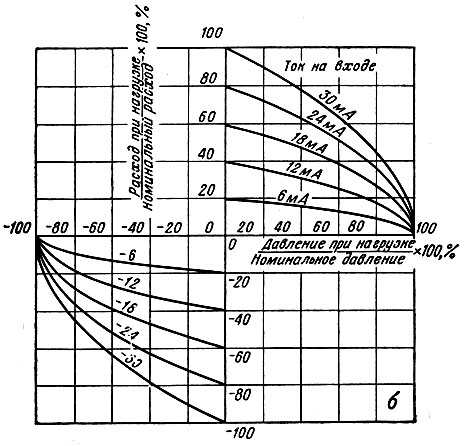
Таблица 9.12. Характеристики 'давление при нагрузке - расход'
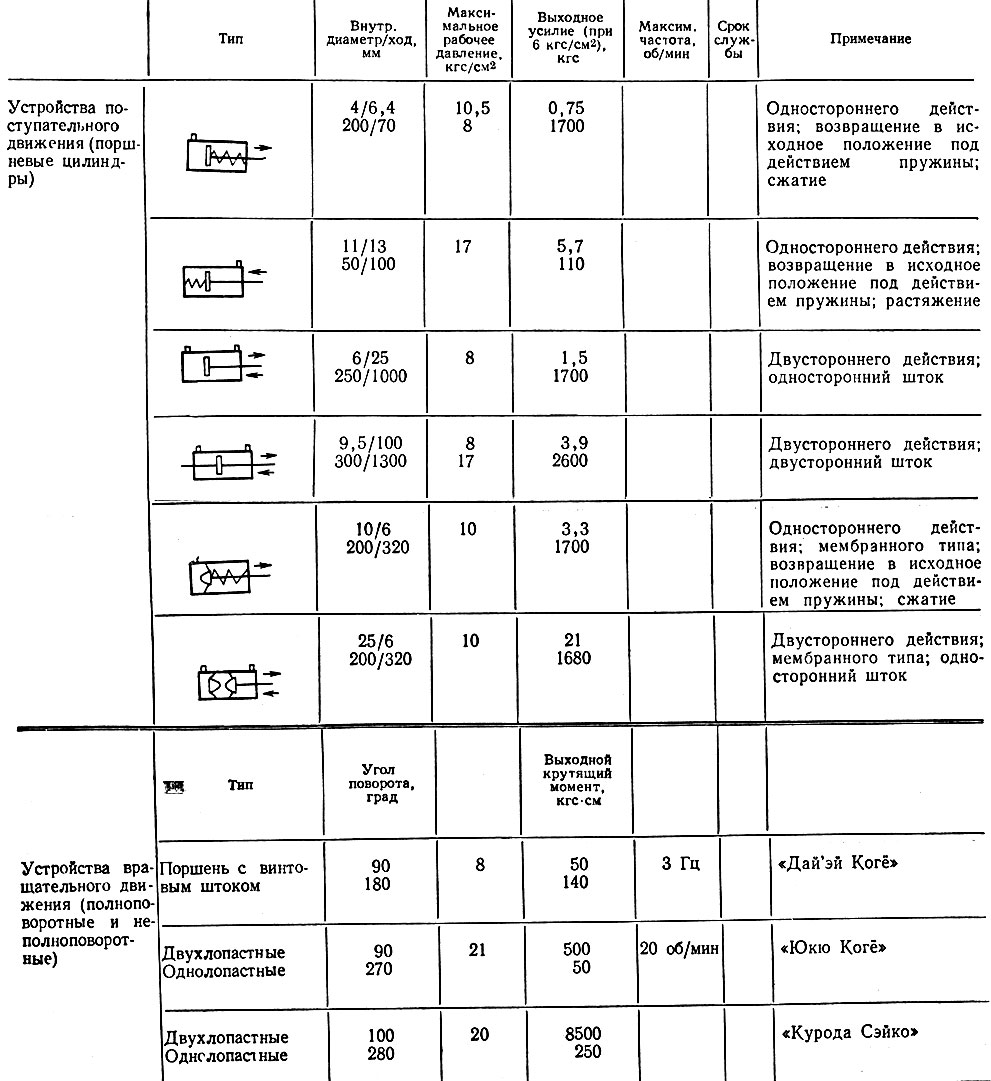
Таблица 9.13. Технические характеристики типовых исполнительных устройств
3) Электрические исполнительные механизмы. Можно указать на следующие преимущества электрических исполнительных механизмов: более высокие возможности передачи сигналов, быстродействие управляющих цементов, возможность питания легкодоступной элекроэнергией; отсутствие проблемы загрязнения, характерной для гидравлических устройств; сравнительно простое обслуживание и т. д. Однако в устройствах с большой приводной мощностью быстродействие меньше, чем у гидравлических механизмов, а сами исполнительные механизмы крупногабаритны и имеют ряд других недостатков. Поэтому обычно используют гибридные системы. Электрические сервомеханизмы чаще применяют в устройствах сравнительно небольших размеров. Поэтому мы сосредоточиваем внимание на устройствах с приводной мощностью не более 1 кВт.
Существуют устройства самых различных видов, которые можно использовать в приводах в качестве электрических исполнительных механизмов. Разнообразие их настолько велико, что всегда есть возможность выбрать модели в соответствии с методами управления.
В данной работе нет возможности описать все виды oмеханизмов, поэтому решено было ограничиться лишь следующими четырьмя видами:
- серводвигатели переменного тока;
- серводвигатели постоянного тока, двигатели с гладким якорем и с печатным якорем;
- шаговые двигатели;
- электромагниты.
а) Серводвигатели переменного тока. Серводвигатели переменного тока широко применяются в промышленных роботах в качестве исполнительных двигателей. Они обладают следующими преимуществами: механической прочностью, простотой обслуживания благодаря отсутствию трущихся деталей (за исключением подшипников), несложным управлением, простотой изоляции цепей, отсутствием дрейфа, наличием моделей на 50(60) и 400 Гц, что позволяет использовать их в различных устройствах, и рядом других преимуществ. Однако к. п. д. у них хуже, чем у серводвигателей постоянного тока. Недостатком их также является расход электроэнергии в обмотке возбуждения при неработающей машине. Эти двигатели тяжелее по весу, чем другие двигатели с такой же выходной мощностью. В тех случаях, oкогда требуются малогабаритные и легкие по весу двигатели, следует по возможности выбирать двигатели с небольшим количеством полюсов. В этом смысле предпочтительнее двигатели с более высокой частотой, т. е. двигатели на 400 Гц, а не на 50(60) Гц. Конструкция усилителей привода должна исключить выпадание фазы, обеспечить эффективное охлаждение усилителей, она не должна служить источником вибраций привода и т. д. При пользовании каталогом двигателей надо обращать особое внимание на номинальные значения синусоидального напряжения и частоты.
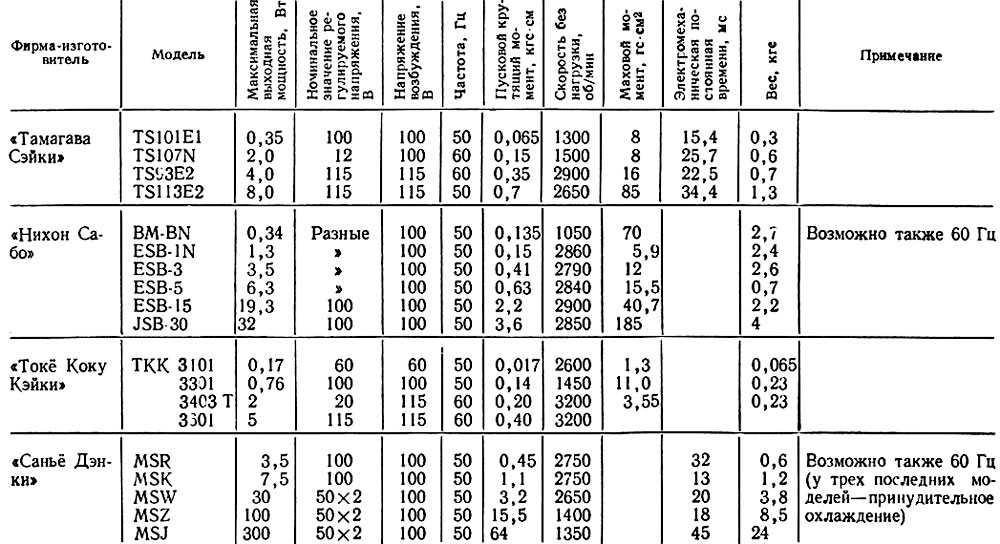
Таблица 9.14. Характеристики серводвигателей переменного тока (50 и 60 Гц)
Характеристики серводвигателей переменного тока для частоты 50(60) Гц приведены в табл. 9.14, а для 400 Гц - в табл. 9.15. Существует много изготовителей двигателей переменного тока и большое количество видов и марок двигателей. Здесь указана лишь весьма небольшая их часть. Существуют также различные конструкции редукторных механизмов и тахогенераторов, используемых в зависимости от конкретного назначения привода.
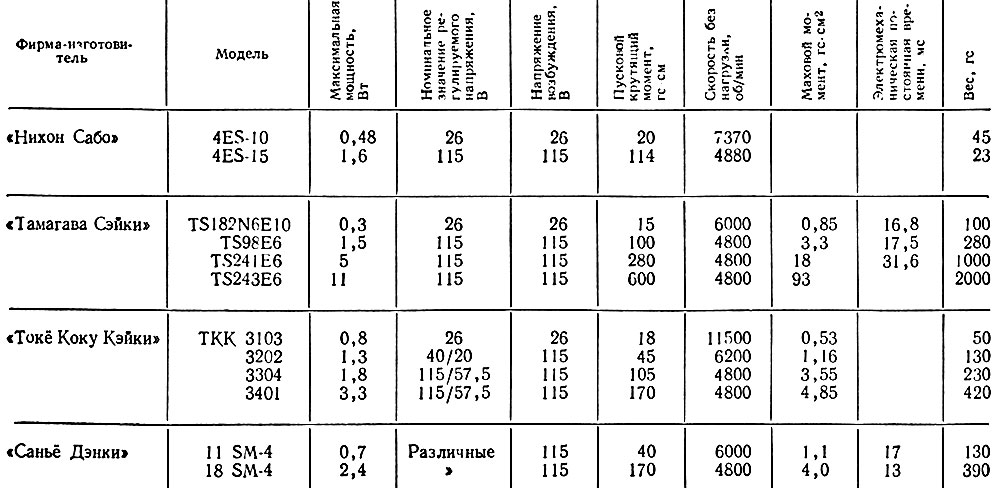
Таблица 9.15. Характеристики серводвигателей переменного тока (400 Гц)
б) Серводвигатели постоянного тока. Двигатели постоянного тока уступают двигателям переменного тока в следующем. Проблемой для них являются обслуживание и долговечность из-за наличия контактных колец, момент трения обусловливает зону нечувствительности, имеется искрение и т. д. Однако в качестве исполнительных двигателей они имеют также значительные преимущества. Эти двигатели малогабаритны, у них высокая выходная мощность и высокий к. п. д. (фиг. 9.29 и 9.30), а также большой пусковой момент. Они допускают изменение скорости в широком диапазоне. Управление возможно как со стороны якоря, так и со стороны обмотки возбуждения. Коэффициент полезного действия остается высоким в широком диапазоне скоростей. В некоторых случаях систему привода можно построить таким образом, чтобы исключить потребление двигателем мощности в отсутствие управляющего сигнала. В силу таких особенностей серводвигатели постоянного тока часто применяют в устройствах сравнительно большой oмощности.
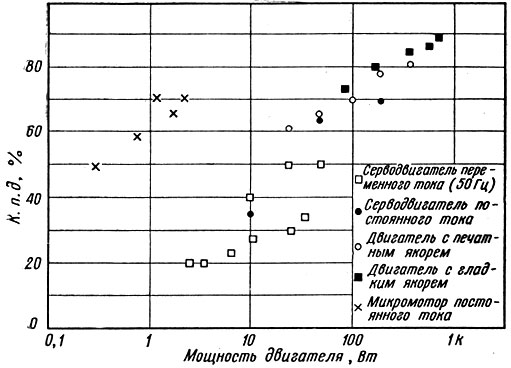
Фиг. 9.29. К. п. д. различных двигателей
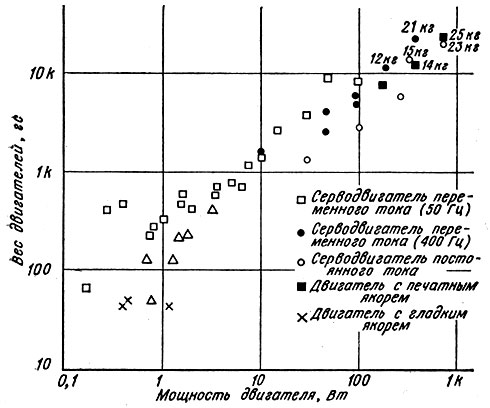
Фиг. 9.30. Вес двигателей различного типа
Среди серводвигателей постоянного тока имеются двигатели с гладким якорем и двигатели с печатным якорем, которые благодаря малой инерционности ротора отличаются высоким быстродействием. Эти двигатели имеют также малую электромагнитную постоянную времени и находят в настоящее время широкое применение. Возможно использование их в повторно-кратковременном режиме работы в сочетании с демпфером для быстрого успокоения. В некоторых станках они применяются вместо шаговых двигателей.
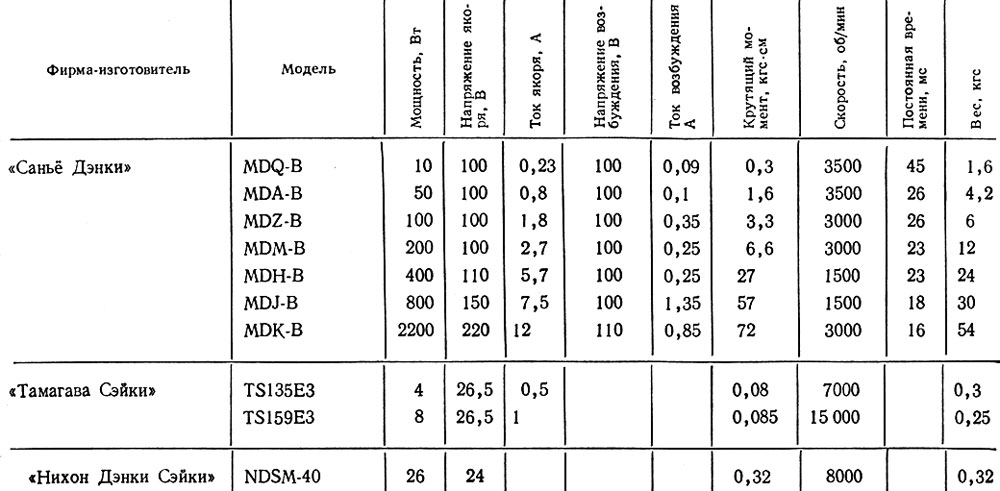
Таблица 9.16. Характеристики серводвигателей постоянного тока
Часто используется широтно-импульсное управление с питанием двигателя по схеме Леонарда от статического преобразователя. Систему управления в этих случаях необходимо проектировать таким образом, чтобы использовать не более 50-60% номинальной мощности двигателя вследствие его дополнительного нагрева переменной составляющей тока. Особенно важной проблемой в крупногабаритных двигателях, как и в двигателях переменного тока, становится охлаждение. В табл. 9.16 приведены характеристики серводвигателей постоянного тока, в табл. 9.17 - двигателей с гладким якорем, а в табл. 9.18 - двигателей с печатным якорем.
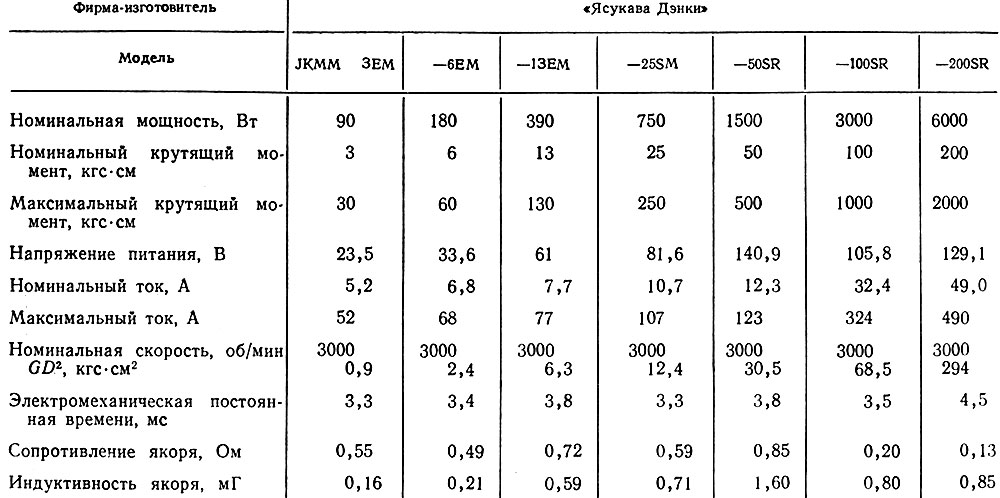
Таблица 9.17. Характеристики двигателей Минерция (с гладким якорем)
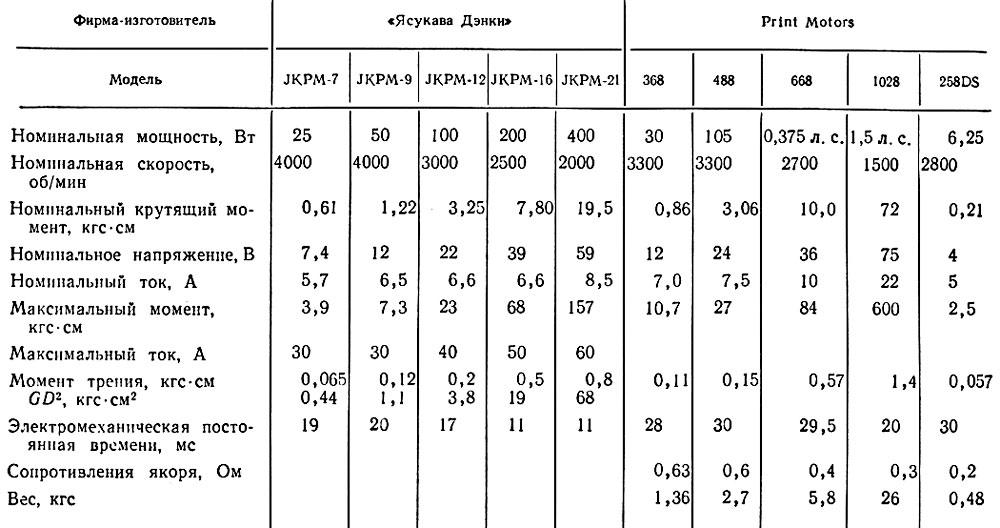
Таблица 9.18. Характеристики двигателей с печатным якорем
в) Шаговые двигатели. Шаговым двигателям свойственны такие преимущества, как простота регулирования положения и скорости, возможность управления с разомкнутым контуром регулирования, высокое быстродействие, сравнительно большой крутящий момент, возможность непосредственного управления с помощью дискретных сигналов и т. д. Они отличаются особенностями, делающими их отличными исполнительными двигателями для роботов. Однако если при проектировании недостаточно учтены величина нагрузки и ее момент инерции, то это может привести к нарушению в работе двигателя.
С ростом момента инерции нагрузки увеличивается электромеханическая постоянная времени шагового двигателя, что сказывается на величине его выходного крутящего момента, зависящего от скорости нарастания импульсов. В тех случаях, когда требуется высокая выходная мощность, используют шаговые двигатели с гидравлическими усилителями.
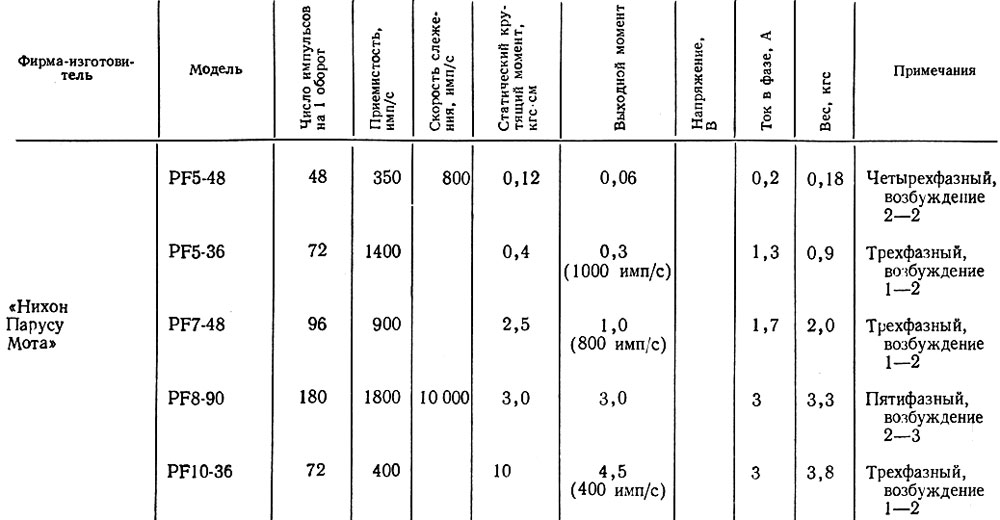
Таблица 9.19. Характеристики шаговых двигателей
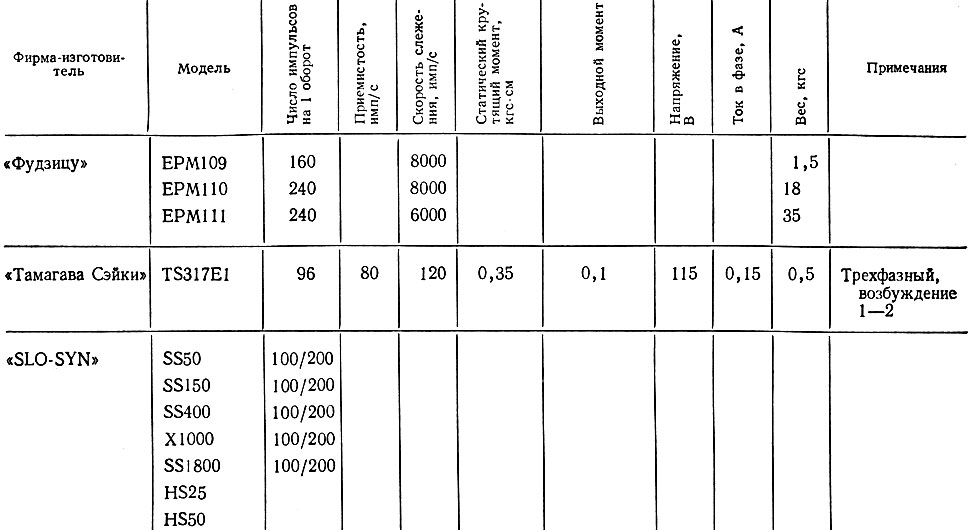
Таблица 9.19. Характеристики шаговых двигателей
Характеристика шаговых электродвигателей приведена в табл. 9.19. Указанные в таблице характеристики дают лишь общие сведения о двигателях, поэтому при проектировании приводов следует пользоваться графиками, приведенными на фиг. 9.31 и 9.32.
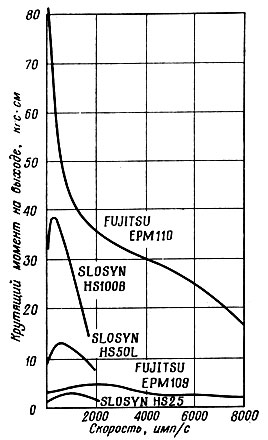
Фиг. 9.31. Характеристики крутящий момент - скорость шаговых электродвигателей
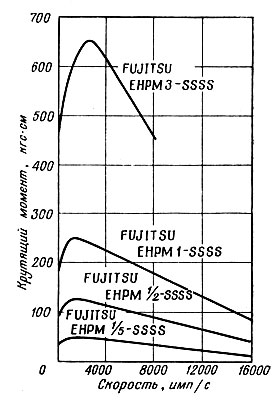
Фиг. 9.32. Характеристики крутящий момент - скорость электрогидроприводов с шаговым электродвигателем
г) Поворотные электромагниты. Такие электромагниты применяются для поворота механизмов на определенный угол, для возвратно-поступательного движения или - в сочетании с храповыми механизмами - для поступательного движения. Возможно регулирование выходного крутящего момента изменением тока, что делает поворотные электромагниты пригодными в качестве исполнительных двигателей для промышленных роботов.
В табл. 9.20 даны примеры характеристик поворотных электромагнитов.
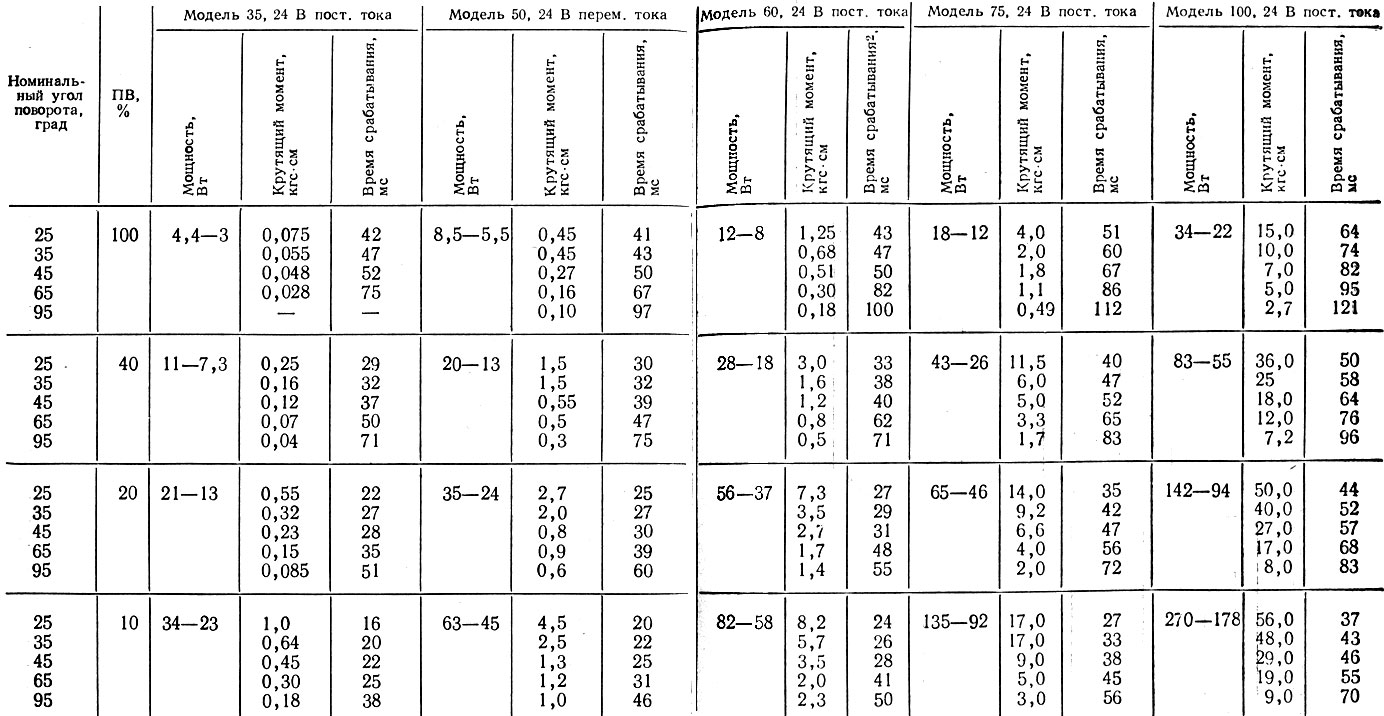
Таблица 9.20. Характеристики поворотных электромагнитов
1 (Величины указаны с учетом изменения мощности в диапазоне температур 20-105 0С)
2 (Время срабатывания - время, необходимое для поворота на номинальный угол; время, необходимое для возврата, которое приблизительно в 1-1,5 раза больше, сюда не входит.)
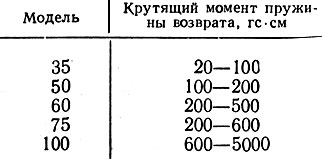
Таблица 9.20. Для определения действительного значения следует вычесть из величины момента, указанной в данной таблице 9.20., момент пружины возврата, указанный в этой таблице
4) Пневматические исполнительные механизмы. Можно указать следующие характерные особенности пневматических исполнительных механизмов: простота управления (заводские механики легко осваивают их и без особого труда обслуживают), дешевизна, высокая надежность, пожаробезопасность, отсутствие загрязнений. Но есть у них и недостатки: трудность поддержания заданной скорости и осуществления позиционного управления, низкая выходная мощность, необходимость вводить в конструкцию смазку и предупреждать коррозию.
Отсюда очевидно, что использование воздуха предпочтительно в тех случаях, когда нет необходимости в устройствах с высокой выходной мощностью, когда имеются ограничения в окружающей среде при эксплуатации, нельзя рассчитывать на достаточно высокий уровень квалификации механиков и специалистов на производстве, существуют ограничения в отношении стоимости и т. д.
Пневматические исполнительные механизмы подразделяются на устройства прямолинейного и вращательного движений. В табл. 9.21 выделено десять классов устройств. Классификация по типу (конструкции дана в табл. 9.22.
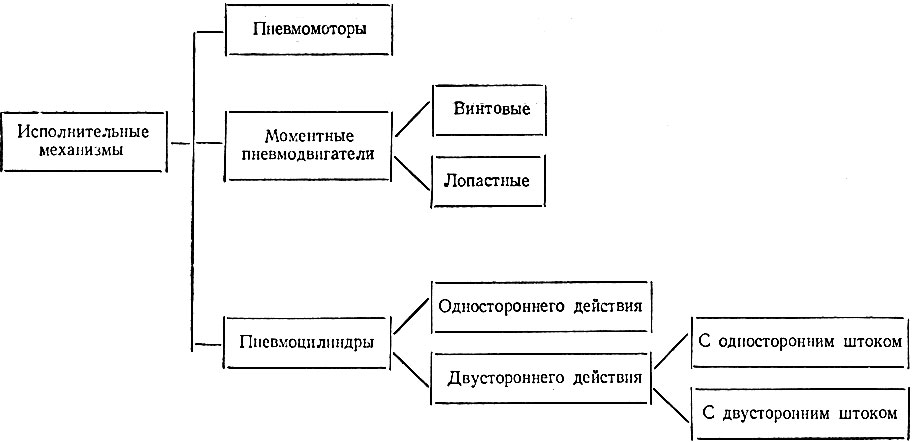
Таблица 9.21. Классификация пневматических исполнительных механизмов
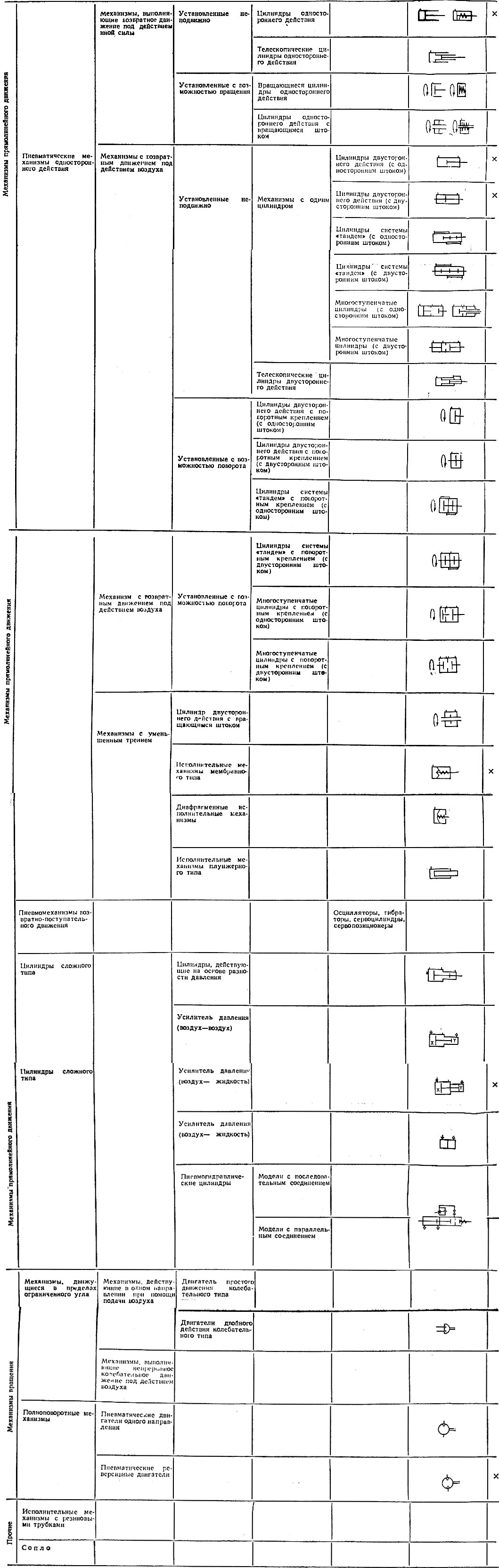
Таблица 9.22. Классификация исполнительных механизмов по типу конструкции
При использовании цилиндров необходимо обратить внимание на следующие моменты: нагрузка обязательно должна быть приложена в осевом направлении; при монтаже должно быть обеспечено отсутствие перекосов в цилиндре; необходимо предусматривать запас хода и выходной мощности; требуется подбор смазочных средств; необходимы надлежащий выбор температуры окружающей среды, использование чистого воздуха и удаление грязи из трубопроводов.
При техническом обслуживании основными вопросами являются регулярный осмотр и замена трущихся деталей с изношенными поверхностями и уплотнений, так как главной причиной снижения выходной мощности цилиндра является течь через уплотнения и из-за износа рущихся деталей. При использовании сильфонных ци-индров необходима особая осторожность, поскольку яльфон легко повреждается при скручивании вала. Не педует также прокручивать вал вручную. В табл. 9.23 приведены примеры характеристик меющихся в Японии распределителей исполнительных еханизмов, в которых за основу взяты ход поршня и гол поворота. В таблице указаны параметры распределителей максимальных и минимальных типоразмеров, ромежуточные опущены. В настоящее времй утверждайся японские промышленные стандарты JIS на цилинды с одним штоком двустороннего действия с клапан-ым управлением.
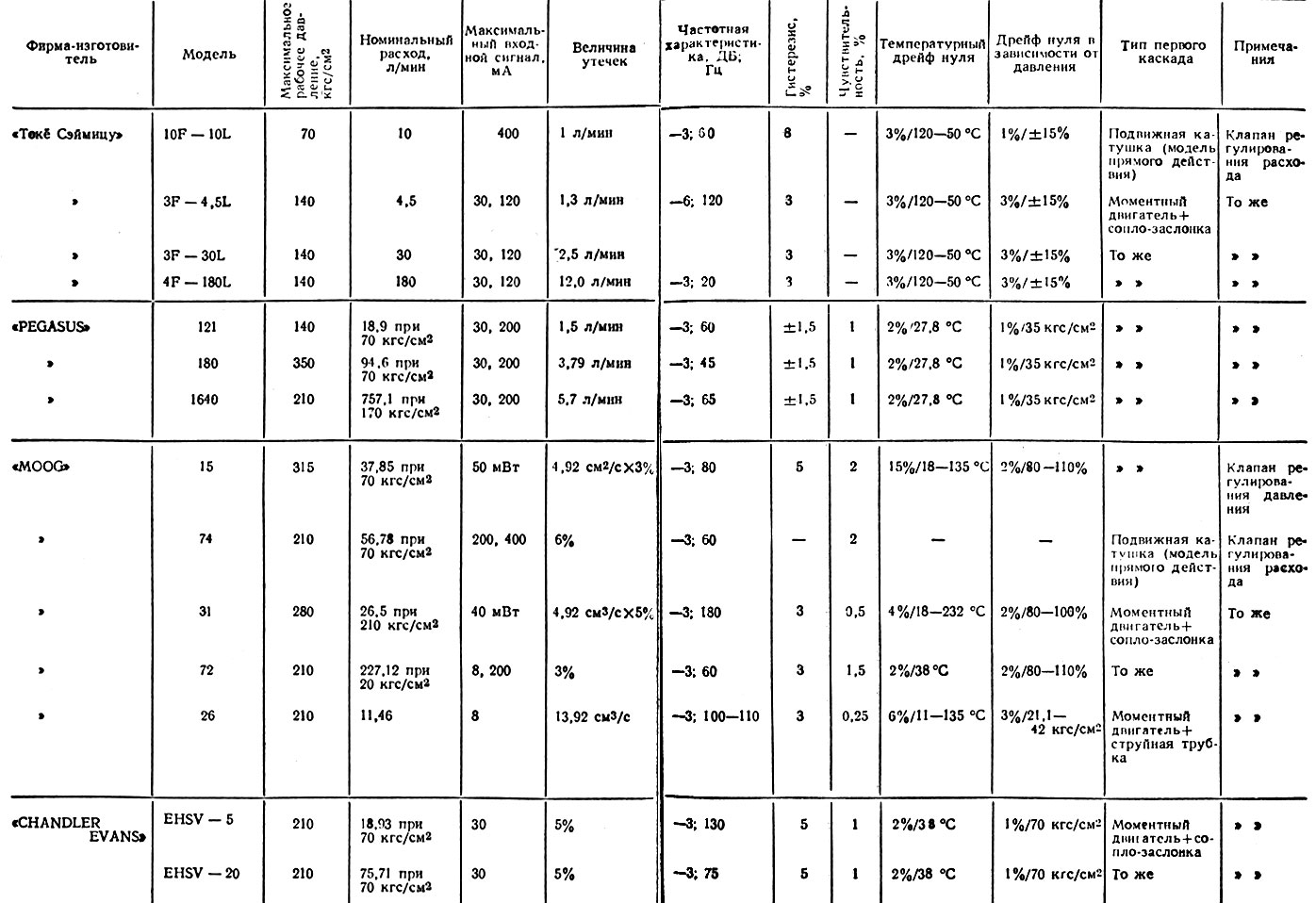
Таблица 9.23
5) Гидравлические исполнительные механизмы. В современных промышленных роботах широко применяют гидравлические исполнительные механизмы. Это бъясняется тем, что устройства гидравлического типа меют ряд преимуществ, в частности легкость, компактность, возможность использования высокого давления, ебольшой коэффициент сжатия, высокую частоту собственных колебаний, легкость регулирования давления и асхода, простоту усиления; они удобны в обслуживании простота осуществления остановки, простота смазки др.). Но они имеют также недостатки. К ним относятся: необходимость в автономном энергетическом блоке; изменение вязкости под влиянием температуры, что ызывает изменение потерь давления в трубопроводе, и зменение характеристик из-за внутренних утечек; горючесть масла; необходимость трубопроводов и проверки абочей жидкости; как правило, большие затраты в на-альный период и т. д.
В промышленных роботах гидравлические испблни-ельные механизмы чаще всего используются следующим образом. Прямолинейное движение осуществляет-я с помощью гидроцилиндров (одноштоковых, двустороннего действия, моментных гидроцилиндров и зубчатых реек). Движения поворота осуществляются с помощью установленных шарнирно гидроцилиндров, гидромоторов и редукторов, гидроцилиндров и реечных передач, а также цепных передач.
Имеется множество видов гидравлических исполнительных механизмов, включая конструкции возвратно-поступательного движения и вращения.
Перечислим моменты, на которые следует обратить особое внимание при применении гидравлических исполнительных механизмов в позиционных системах управления с сервомеханизмами.
1) Желательно уменьшение трения, так как в противном случае увеличивается зона нечувствительности и ухудшается точность остановки. Кроме того, если разница между статическим и динамическим трением чрезмерно велика, может наблюдаться прерывистое движение и ухудшаются возможности управления.
2) Естественно, что допустимы только небольшие-внутренние утечки, так как при повышенной утечке снижается возможность стабильной остановки и падает к. п. д.
3) Требуются хорошие характеристики при низких скоростях. Для промышленных роботов необходимо, чтобы минимальное число оборотов на низких скоростях было достаточно низким и при этом было обеспечено плавное движение. Необходим широкий диапазон изменения скоростей от низких до высоких.
4) Исполнительные механизмы применяются как: устройства, заменяющие человека, поэтому от них требуются такие же или даже большие быстродействие и подвижность, чем у человека. Вследствие этого необходимо выбирать устройства, имеющие хорошие частотные характеристики. Кроме того, при расчете занимаемой при установке механизмов площади требуются также малогабаритность и небольшой вес. Испольнительные механизмы используются как одно из звеньев в системе производственного оборудования, поэтому они должны быть достаточно прочными. От исполнительных механизмов как автоматических устройств, естественно, требуется непрерывная надежная работа в течение 24 ч. Необходимо предусмотреть возможность форсированного режима эксплуатации, возможность частых пусков и остановок, прямого и обратного хода и т. д.
В табл. 9.24 приведены примеры гидравлических серводвигателей таких систем, в (которых преобразователь и исполнительный механизм составляют единое целое; это как раз характерные примеры гидравлических исполнительных механизмов.
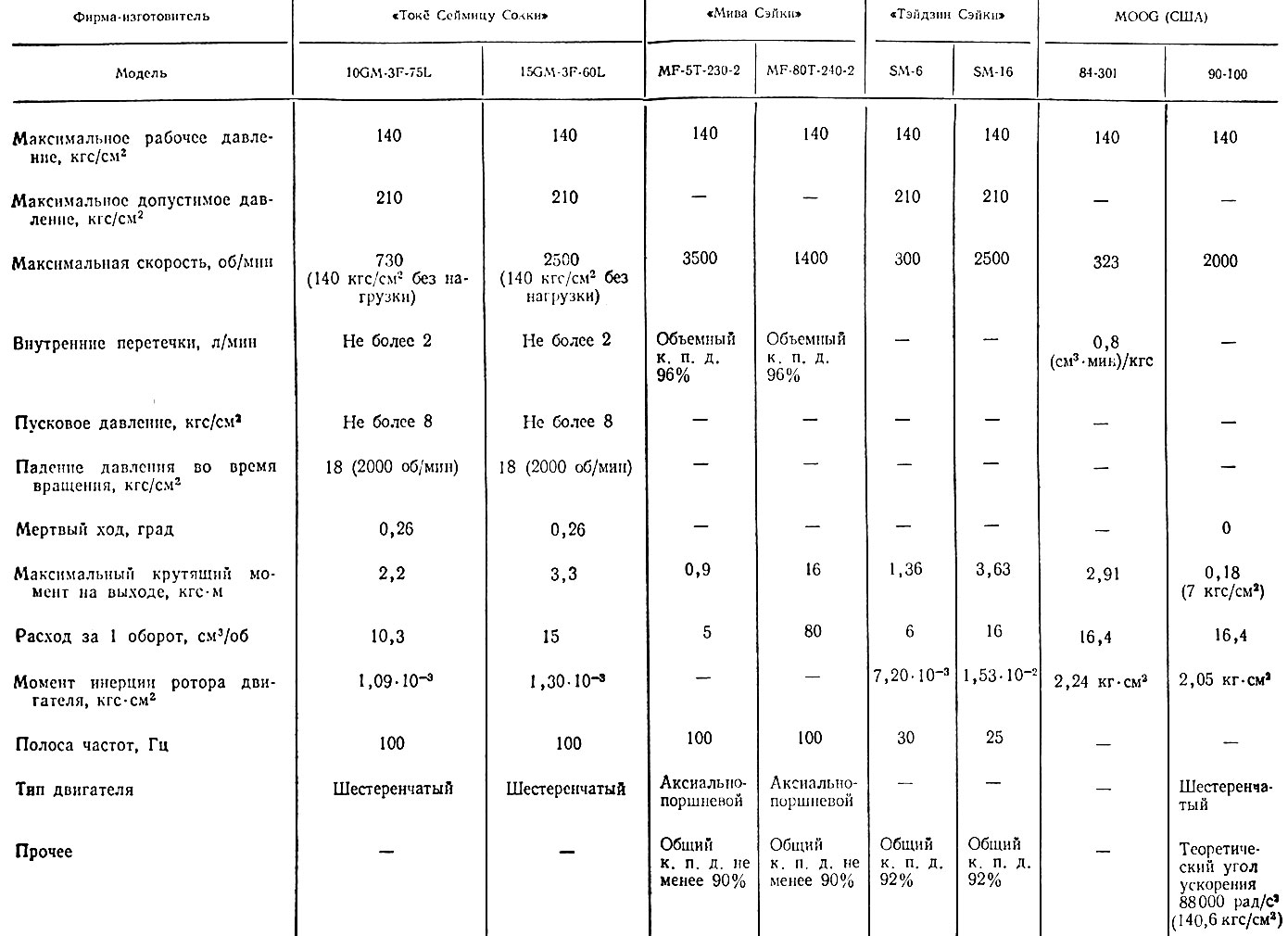
Таблица 9.24. Примеры типичных гидравлических серводвигателей
Электрогидравлические шаговые двигатели занимают важное место в промышленности с тех пор, как в центре внимания оказались станки с числовым программным управлением. Эти двигатели состоят из электрического шагового двигателя; и гидравлического усилителя.
Как и электрические шаговое двигатели, они имеют ряд преимуществ, например возможность нелосредственного числового управления, легкость регулирования положения и скорости и, следовательно, возможность управления с разомкнутым контуром. Эти двигатели включают гидравлический усилитель, поэтому у них большой выходной момент, хорошее быстродействие и стабильность работы как при большой инерции нагрузки, так и при колебаниях момента нагрузки. Как исполнительные механизмы, которые можно применить даже в крупногабаритных роботах, они обладают превосходными качествами. Однако к ним необходима автономная гидростанция, поэтому в тех случаях, когда их включают в конструкцию робота, следует уже при конструировании позаботиться о компактности этого агрегата.
В табл. 9.25 собраны характеристики различных электрогидравлических шаговых двигателей.
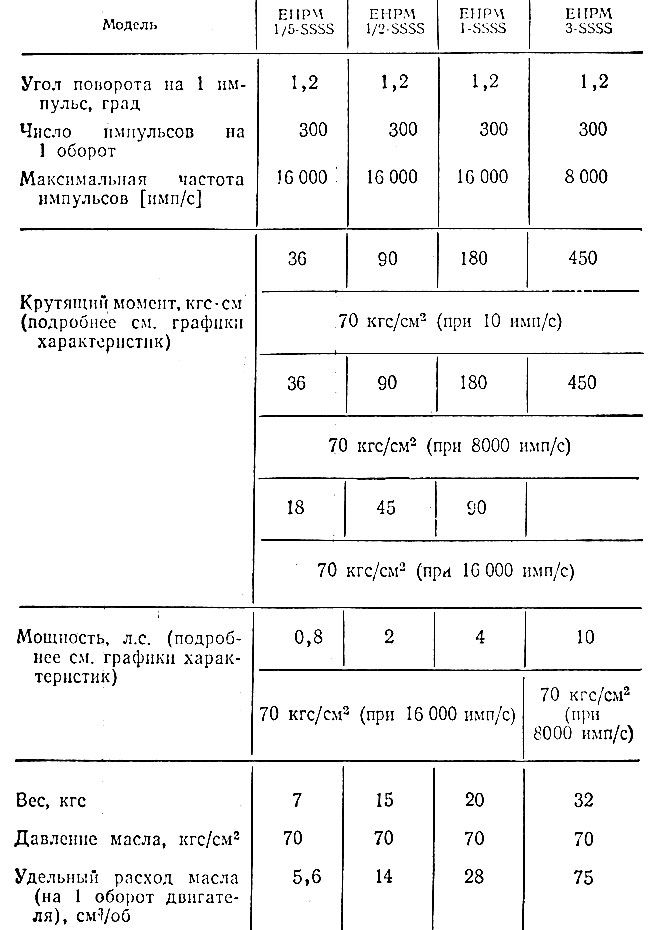
Таблица 9.25. Характеристики шаговых электродвигателей
На фиг. 9.33 приведены характеристики выходного момента и выходной мощности (л. с.) различных электрогидравлических шаговых двигателей.
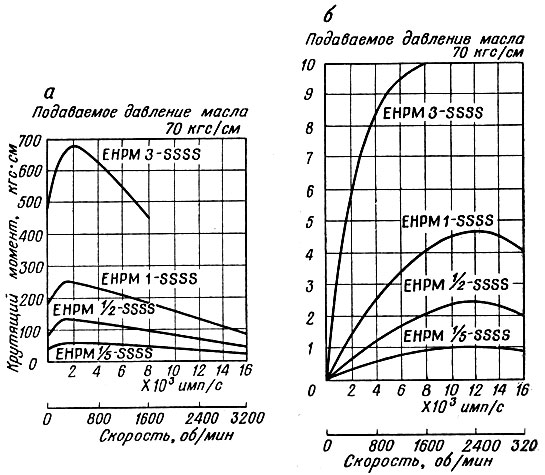
Фиг. 9.33. Крутящий момент и мощность электрогидроприводов с шаговым электродвигателем. а - крутящий момент на выходе; б - мощность, л. с
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'