9.3. Датчики
1) Общий обзор. Датчики промышленных роботов можно разделить на два вида: датчики внешней информации и датчики внутренней информации. Первые из них предназначены для контроля за состоянием объектов, с которыми работают промышленные роботы, вторые - для контроля за функционированием самих роботов. Датчики внутренней информации устанавливаются в приводах исполнительных механизмов роботов.
Когда определен метод управления роботом, можно подобрать и необходимые для него типы датчиков. Если не рассматривать вопросы улучшения технических характеристик роботов, обеспечения их высокой надежности и некоторые другие, можно считать, что датчики внутренней информации для роботов уже в основном разработаны, так как для этой цели могут быть использованы датчики, применявшиеся ранее в различных приборах и устройствах. Напротив, вполне удовлетворительных датчиков внешней информации пока не имеется. В этой области еще предстоят интенсивные исследования и разработки.
Сказанное подтверждается также результатами анкетного опроса потребителей, изложенными в гл. 8. Из 135 потребителей роботов, ответивших на вопросы анкеты, 32% высказались за расширение (номенклатуры датчиков внешней информации для промышленных роботов. В большинстве ответов (77%) содержатся заявки на датчики .положения и осязания. На вопрос о будущих роботах поступило 92 ответа. При этом в большинстве (61%) ответов говорится об оснащении роботов органами зрения и в 12% ответов - об их оснащении органами слуха.
2) Датчики внешней информации. Датчиками внешней информации (называют устройства, предназначенные для контроля за состоянием объекта и необходимые для автоматического выполнения роботом технологических операций. С помощью этих датчиков определяются положение, форма и другие признаки объекта.
Из датчиков внешней информации для промышленных роботов, выпускаемых в настоящее время или намеченных к выпуску в ближайшем будущем, имеются только простые датчики контактного типа, как, например, предельные выключатели. Однако в медицине и других областях ведутся исследования и разработки датчиков зрения, а также других типов датчиков. Со временем широкое применение в промышленных роботах найдут и тактильные датчики, имитирующие чувство осязания в пальцах человека.
Существуют два варианта работы промышленных роботов:
1) по заранее составленной программе;
2) с распознаванием окружающей обстановки и соответствующим выбором программы действий.
Современные промышленные роботы в основном работают по заранее составленной программе. Однако существуют также роботы, в которых частично реализуется второй вариант работы. Можно предположить, что по мере создания более универсальных роботов и в связи с прогрессом в области механизации и автоматизации производства использование второго варианта работы будет расширяться. Соответственно станут необходимы и датчики внешней информации.
В настоящее время можно привести следующие примеры операций, при которых осуществляется сбор внешней информации и определяются последующие действия:
1) При автоматической загрузке пресса наличие в определенном месте детали, подлежащей установке в пресс, определяется с помощью клапана, реагирующего на разность давлений. Пример автоматизации загрузки пресса показан на фиг. 9.15.
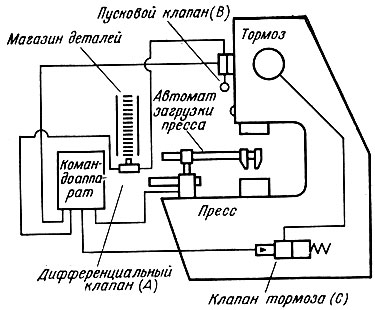
Фиг. 9.15. Пример автоматизации загрузки пресса
2) Положение рамы, находящейся на конвейере, контролируется с помощью фотоэлектрических датчиков, микровыключателей или других устройств. При опрокидывании рамы подается команда на схват, который поворачивает раму в правильное положение.
3) При нарушении процесса перемещения листовых материалов (например, при подаче изделия на место, которое занято) их транспортировка прекращается с помощью специальной системы блокировки. Такая система показана на фиг. 9.16. При отсутствии изделия переключающий клапан блокировки опускает руку. В нижнем положении руки воздух из вакуумной присоски отсасывается, и изделие отделяется.
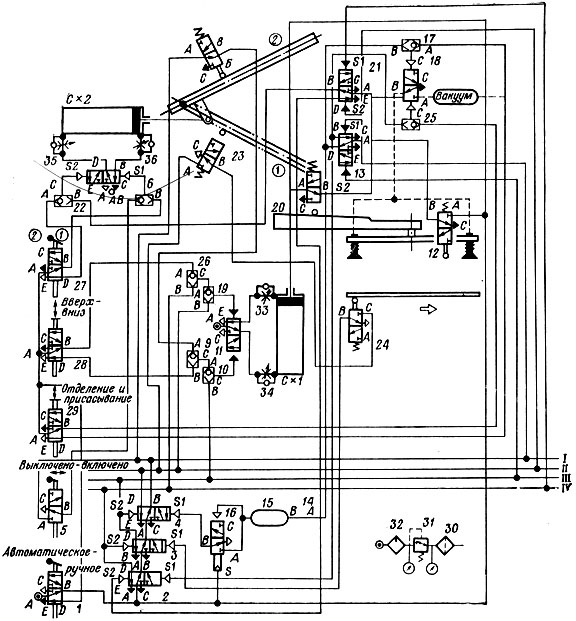
Фиг. 9.16. Система блокировки
4) С помощью фотоэлемента в процессе прядения обнаруживается обрыв пряжи, которая автоматически соединяется.
5) В челноке швейной машины находится выключатель S1 а на главной оси машины - переключатель S2, как показано на фиг. 9.17. Они соединены последовательно и подключены ко входу трипгерной схемы. При нормальной работе машины цепь разомкнута, так как одновременно выключены оба переключателя. Когда нить кончается или обрывается, цепь замыкается, срабатывает триггерная схема и машина останавливается.
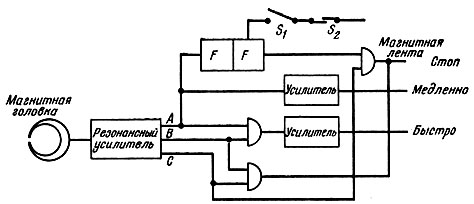
Фиг. 9.17. Схема управления швейной машиной с обратной связью
6) На заводе компании Форда при извлечении автомобильных деталей после сварки с помощью предельных выключателей определяют наличие деталей в месте разгрузки, правильность их установки, наличие оставшихся деталей. При нарушении процесса робот "Версатран" останавливается, ожидая восстановления нормальной ситуации.
В настоящее время для получения внешней информации пользуются самыми различными способами, когда роботы не оснащены соответствующими датчиками. Однако, учитывая погрешности датчиков внутренней информации, внешние помехи, пределы точности механизмов и т. д., на руке или схвате робота, т. е. на механизмах, манипулирующих с объектом, желательно иметь датчики, предназначенные для определения расстояния до объекта или сигнализирующие о соприкосновении с ним. Только наличие таких датчиков вместе с соответствующей системой обработки информации обеспечивает надежное выполнение роботом многообразных операций. По этой причине здесь и рассматриваются датчики внешней информации, установленные на самом роботе.
Такие датчики, помимо высокой надежности, точности, большого ресурса, должны обладать еще следующими показ а тел я ми:
1) малыми габаритами, так как датчики должны устанавливаться на кисти робота и не должны повреждаться в процессе работы;
2) малым весом, так как установка датчиков на конце руки оказывает влияние на динамические характеристики сервоприводов робота;
3) большой жесткостью, что необходимо для высокой точности определения положений.
а) Контактные датчики.1) Обнаружение соприкосновения с объектом. Исследования в этой области ведутся в разных организациях. Рука промышленного робота, показанного на фиг. 9.18, выдвигается и поворачивается (гидравлическими приводами. Когда шупальца, смонтированные на кисти, соприкасаются с внешним краем конусообразного направляющего отверстия, сервосистема переключается и дальнейшее перемещение внутрь конуса осуществляется с пониженной скоростью. При таком методе управления обеспечивается высокая точность позиционирования (±0,5 мм).
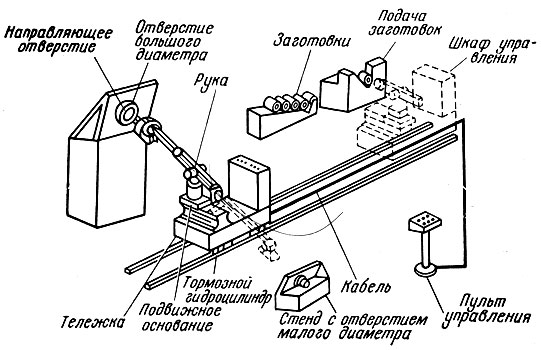
Фиг. 9.18. Промышленный робот с осязанием
На концах схвата МН-1 Массачусетского технологического института, управление которым осуществляет ЭВМ, установлено 7 переключателей (фиг. 9.19). С их помощью определяется соприкосновение с рабочей поверхностью объекта и положение объекта и осуществляется управление движением схвата.
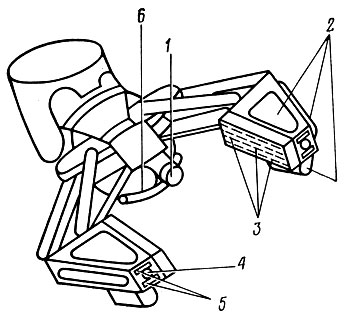
Фиг. 9.19. Датчики схвата МН-1. 1, 2 - тактильные датчики; 3, 5, 6 - датчики давления; 4 - фотодиоды
У робота с искусственным интеллектом SRI (Стэнфордокий исследовательский институт) на обоих концах пружины полукруглой формы прикреплены предельные выключатели, срабатывающие при соприкосновении любой части пружины с объектом.
Иноуэ (Токийский университет), Сато (Институт комплексных исследований электронной техники) и др. провели эксперименты по использованию информации "включено-выключено". Помимо выполнения простейших действий (захват объекта, изменение направления движения), им удавалось путем соответствующей установки переключателей на руке и концах схвата и использования логической схемы оценивать относительное положение робота и объекта, управлять шарнирами руки, выполнять обход препятствий и другие действия. При большом количестве переключателей неизбежным окажется применение микропереключателей. Характеристики микропереключателей, поступающих в продажу, зафиксированы японскими (промышленными стандартами. Некоторые из них приведены в табл. 9.1. Микропереключатели меньше и легче обычных контактных переключателей. Они могут взаимодействовать с неметаллическими объектами и обладают высокой точностью. Однако микропереключатели обладают меньшими надежностью и сроком службы. Для них опасны удары при соприкосновении с объектом, и они не могут работать с объектами, нагретыми до высокой температуры.
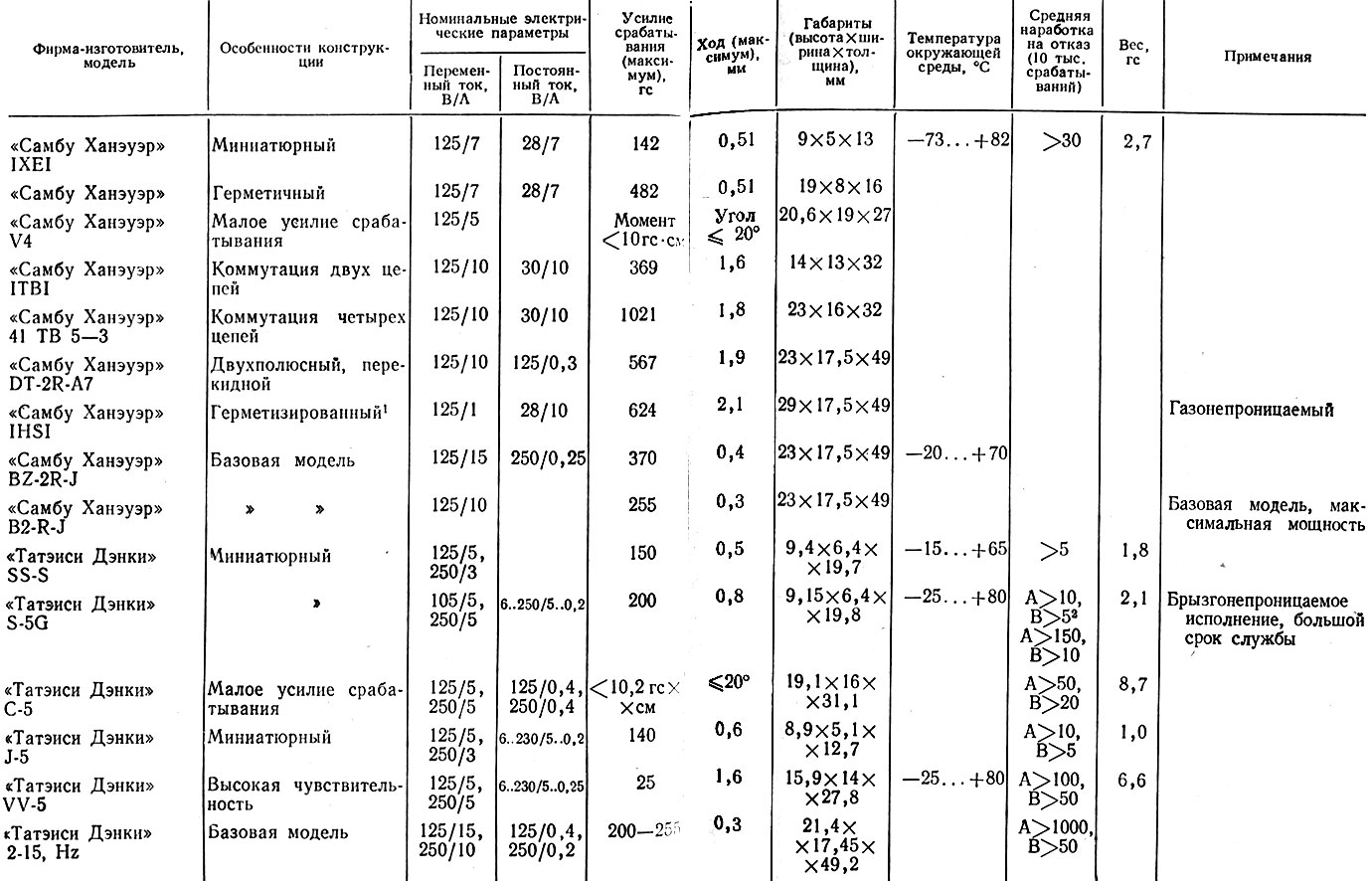
Таблица 9.1. Микропереключатели
2) Распознавание давления. Человек, манипулируя предметом, не только рассматривает его, но и, пользуясь чувством осязания (ощущение давления на кожу), регулирует усилие сжатия соответственно весу и прочности предмета. Р. Гетц обращает внимание на это обстоятельство в связи с работой копирующего манипулятора, где с помощью сервосистемы двустороннего действия противодействие со стороны предмета передается оператору, позволяя ему регулировать усилие захвата.
Для перемещения объектов с более высокой надежностью роботы следует оснащать не только датчиками, фиксирующими соприкосновение с объектом, но и датчиками, дающими непрерывную информацию о давлении, приложенном к руке и к схвату.
В области протезирования уже существует механизм управления силой схвата с обратной связью по давлению, что предотвращает повреждение как объекта, так и самой искусственной руки. Томович (Белградский университет) и Като (Университет Васэда) с сотрудни-ка(ми разработали элементы, чувствительные к давлению, которые используются в качестве датчиков давления для кончиков пальцев протеза руки. Характеристика такого датчика приведена на фиг. 9.20. Датчик представляет собой слой электропроводящего вспененного полиуретана, заключенного с обеих сторон между тонкими металлическими пластинами. Слой полиуретана после нанесения сушится несколько часов при комнатной температуре. Изменение давления преобразуется в датчике в изменение сопротивления между пластинами. Мори (Токийский технологический институт) изготовил датчик, чувствительный к давлению, на базе бифилярно смонтированных пьезоэлектрических элементов.
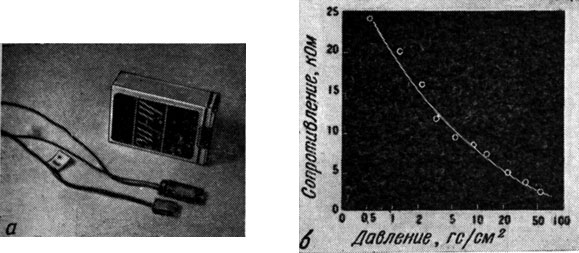
Фиг. 9.20. Миниатюрный датчик, чувствительный к давлению. а - элемент, чувствительный к давлению; б - характеристика элемента
В схвате МН-1 (фиг. 9.19) в качестве элемента, чувствительного к давлению, использован проволочный тензометр. Проволока имеет толщину порядка 0,25 мкм и при намотке образует решетку. В последнее время ведутся исследования полупроводниковых тензометров, которые заменят проволочные. Полупроводниковые тензометры имеют меньшие габариты, чем проволочные, малый вес, высокую чувствительность. По своим характеристикам они пригодны в качестве датчиков давления для роботов.
Управляемая с помощью ЭВМ искусственная рука, подобная человеческой, попытки создания которой предпринимаются Като с сотрудниками (Университет Васэда), показана на фиг. 9.21. В руке, имеющей форму крюка, используются полупроводниковые элементы, чувствительные к давлению. Совместно с тактильными датчиками они являются источником внешней информации. На нынешнем этапе полупроводниковые датчики еще не обладают удовлетворительными температурными характеристиками, достаточной помехозащищенностью, стабильностью и т. д. Однако стремительные темпы развития полупроводниковой техники позволяют рассчитывать на быстрое преодоление этих недостатков. Характеристики полупроводниковых датчиков давления приведены в табл. 9.2. Можно полагать, что при установке соответствующих пороговых величин срабатывания полупроводниковые датчики давления можно будет использовать вместо микропереключателей, как микроминиатюрные предельные выключатели.
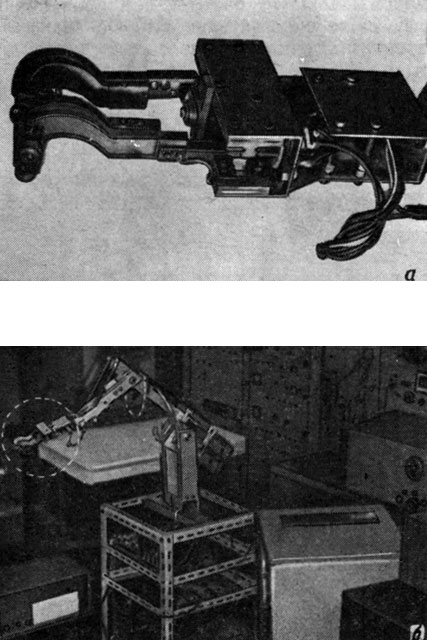
Фиг. 9.21. Искусственная рука WAM-2 с ощущением давления, управляемая с помощью ЭВМ. а - рука в форме крюка с полупроводниковыми датчиками; б - общий вид руки

Таблица 9.2. Полупроводниковые датчики давления
б) Бесконтактные датчики. К типу бесконтактных относятся оптические, электромагнитные, ультразвуковые и др. датчики. Из-за отсутствия непосредственного соприкосновения с объектом при использовании бесконтактных датчиков не приходится опасаться ударов об объект или плохого контакта. В этом их основное преиущество по сравнению с датчиками контактного типа. Однако в новых разработках отмечается тенденция к возрастанию габаритов и веса б ее контактных датчиков.
1) Электромагнитные бесконтактные датчики. Имеются следующие типы бесконтактных датчиков:
а) бесконтактные переключатели, в которых используется эффект изменения сопротивления 'магнитной цепи при прохождении магнитного потока через объект;
б) датчики-генераторы, у которых выходной сигнал исчезает вследствие изменения импеданса катушки под влиянием объекта;
в) датчики мостового типа, у которых под влиянием объекта нарушается равновесие мостовой схемы, и др.
Перечисленные выше датчики отличаются высокой прочностью и надежностью, однако они могут взаимодействовать только с металлическими объектами; кроме того, на их точность оказывают влияние величина объекта, его свойства и скорость перемещения. Измерения, как правило, возможны на расстоянии от нескольких миллиметров до нескольких сантиметров.
По сравнению с контактными большинство бесконтактных датчиков отличается большими размерами и весом, однако есть и датчики, сравнимые по этим параметрам с микропереключателями. Ведутся разработки малогабаритных датчиков для взаимодействия с объектами из магнитных материалов. Примеры электромагнитных бесконтактных датчиков приведены выше в табл. 9.3.
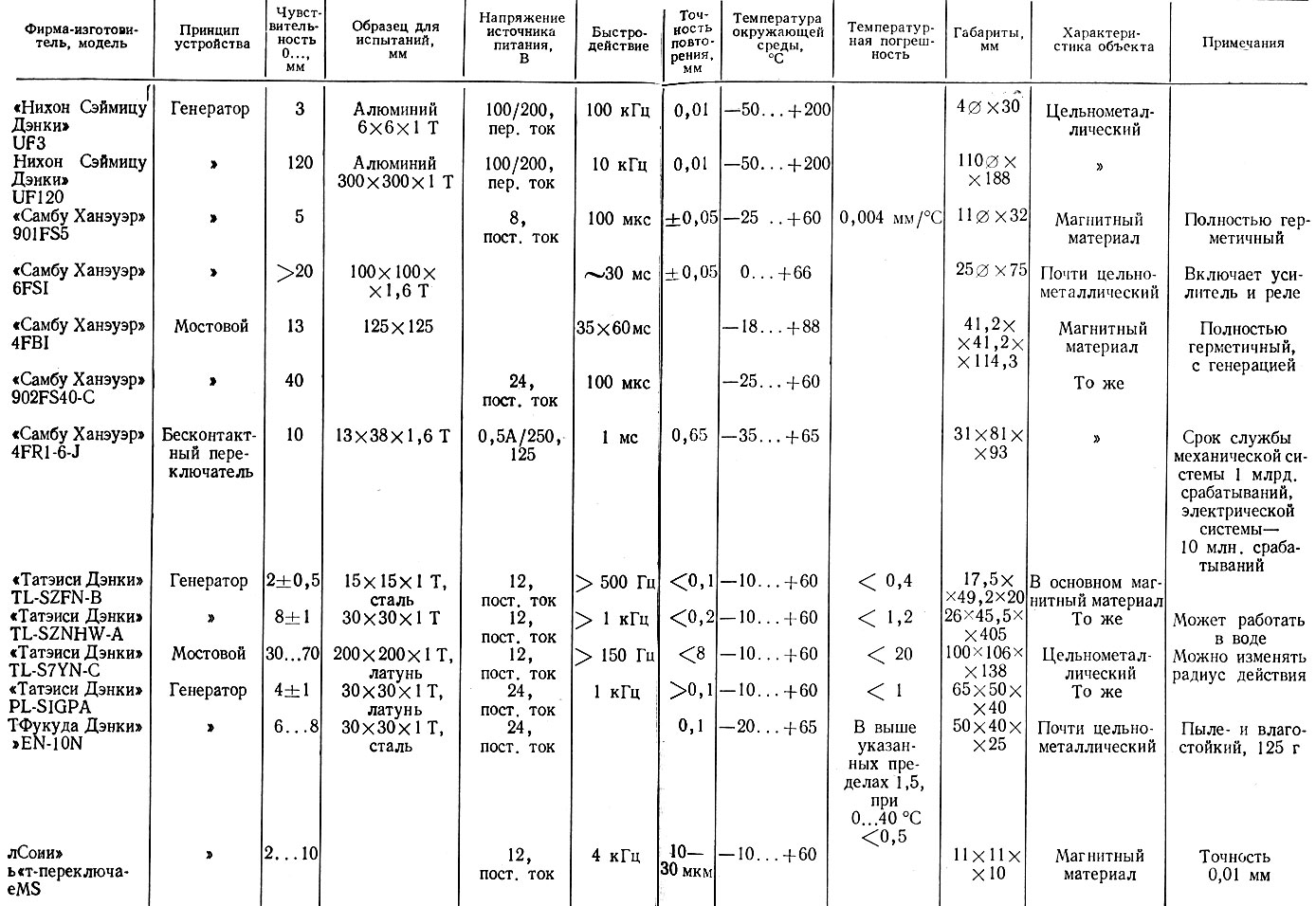
Таблица 9.3. Электромагнитные бесконтактные датчики
2) Оптические датчики. Если в качестве источников света использовать лампы, светодиоды и т. д., а в качестве светоприемников - сернистосвинцовые и сернистокадмиевые фотоэлементы, фотодиоды, фототранзисторы и т. д., то для обнаружения и определения положения объекта можно использовать пересечение объектом светового потока. В экспериментальном образце схвата МН-1 (см. фиг. 9.19) на конце руки установлены оптические датчики. Здесь сближение с объектом фиксируется фотодиодами.
Проблему в оптических датчиках составляют срок службы и прочность источников света и оветоприемников. Ведутся исследования по использованию в оптических датчиках лазерного луча.
3) Ультразвуковые датчики представляют собой систему, состоящую из приемника и передатчика сигналов. Они могут использоваться вместо оптических датчиков. С помощью отраженного ультразвукового сигнала можно обнаруживать объекты и измерять расстояния до них.
Ультразвуковые датчики имеют по сравнению с оптическими следующие преимущества: они могут обнаруживать прозрачные объекты; срок службы генератора колебаний практически не ограничен; их показания не зависят от освещения; их можно использовать на открытом воздухе и при наличии помех; на них не оказывают значительного влияния пыль, пар и другие факторы среды; измерения с ними можно проводить под водой и т. д.
Ультразвуковые датчики имеют перед электромагнитными то преимущество, что позволяют обнаруживать также и неметаллические предметы. Однако точность определения положения объекта при (использовании таких датчиков ниже ввиду нечеткой направленности ультразвуковых волн. Кроме того, они обладают ограниченной способностью обнаружения микроскопически малых тел, что связано с относительно большой длиной ультраззуковых волн. Примеры ультразвуковых датчиков приведены в табл. 9.4.
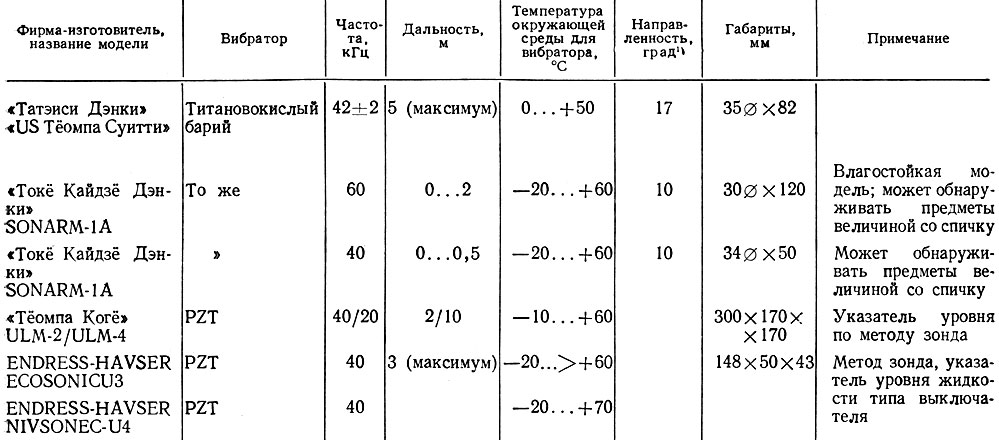
Таблица 9.4. Примеры ультразвуковых датчиков
4) Струйные датчики. Недавно появились датчики, в которых струю воздуха можно использовать подобно электрическому току; они работают аналогично фотоэлектрическим, электромагнитным и т. п. датчикам. Воздушные микрометры, широко используемые для измерения весьма малых зазоров, можно применять как бесконтактные выключатели. Однако при общей высокой чувствительности они не могут обнаружить объект, если он удален на расстояние более миллиметра.
Существует метод, при котором используют воздушную струю подобно пучку света. Таким способом можно измерять расстояния, превышающие диаметр сопла примерно в 50 раз. При измерении движущихся объектов Получаются завышенные размеры вследствие движения воздуха вокруг самих объектов. Чувствительность струйных датчиков может быть даже выше, чем оптических. Струйные датчики еще находятся в стадии разработки и от них можно многого ожидать в будущем.
в) Распознавание образов с использованием датчиков внешней информации. При захвате объекта и выполнении операций манипулирования робот должен иметь возможность распознавания величины, формы и других характеристик объекта. Без этого не могут быть обеспечены дальнейшее повышение уровня механизации и автоматизации производства и прогрессирующая замена человека машиной. Примером робота, у которого предусмотрена такая способность, является робот фирмы "Тоиё Кэйки" (см. фиг. 9.18).
Определение величины (и соответственно веса) объекта осуществляется по раскрытию схвата. Если объект имеет значительный вес, происходит выдвижение колонны и только после этого робот переходит к выполнению следующих действий.
Распознавание формы объектов находится еще в начальной стадии развития и предполагается, что внедрение его в практику - дело будущего. В настоящий момент данная функция реализуется главным образом с помощью устройств зрения. Этот вопрос рассматривается в гл. 10. Сейчас делаются попытки распознавания формы объектов с помощью датчиков внешней информации.
Подобная идея уже давно рассматривалась в связи с манипулятором "Хэндимэн" ("Дженерал электрик"). "Хэндимэн" представляет собой гидравлический копирующий манипулятор, оснащенный сервосистемами двустороннего действия. Существует мнение, что по отражению усилия от каждого сочленения оператор может судить о форме поверхности соприкосновения - плоская она или изогнутая.
Роботы, способные распознавать форму с помощью датчиков внешней информации, пока еще реально не существуют, но в порядке экспериментов предложен ряд методов распознавания формы объектов. Шерридан с сотрудниками в Массачусетском технологическом институте предложил устройство, показанное на фиг. 9.22.В этом устройстве эластичная основа внутренних поверхностей схвата покрыта расположенными в ряд отражателями малого размера. Поверхность схвата под действием объекта деформируется, что приводит к искажению светового потока, соответствующему распознаваемому образу. Световой поток, пройдя через оптические волокна, отражается на телевизионном экране, и по чередованию светлых и темных участков на экране можно определить форму объекта. Существует мнение, что с помощью подобного метода можно будет осуществить непрерывное распознавание формы.
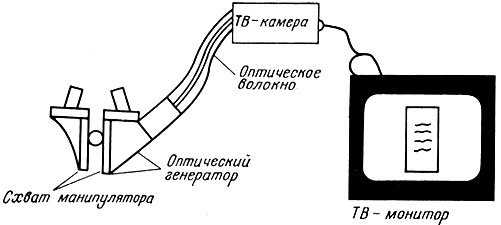
Фиг. 9.22. распознавание образов оптическим методом
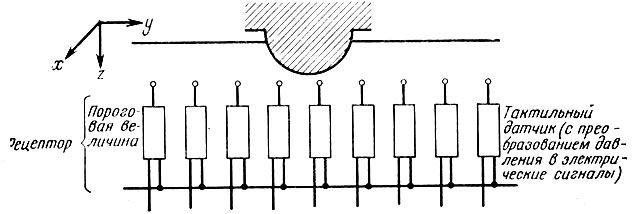
Оптические датчики не годятся для роботов, используемых при отсутствии источников света и в местах с сильным рассеянием и поглощением света, например под водой или в космическом пространстве. Для этих случаев предлагаются методы с использованием тактильных датчиков. Устройство, предложенное Мори с сотрудниками (Токийский технологический институт), показано на фиг. 9.23. В данном устройстве на поверхности контакта расположены пьезоэлементы, а пространство вокруг них заполнено эластичным материалом, который деформируется соответственно форме объекта. Деформация с помощью пьезоэлементов преобразуется в электрические сигналы. На основе этих сигналов на выходе создается некий образ, характер которого зависит от деформации и пороговой величшод 0. Меняя пороговую величину, можно по изменению образа распознать и форму объекта.
Было предпринято несколько попыток получения внешней информации с помощью устройств искусственного зрения. Обычно в качестве датчиков зрения применяют телевизионные камеры типа видикон или другие устройства.
Робот ЭТЛ (фиг. 9.24), разработанный в Институте комплексных исследований электронной техники, может с помощью телевизионной камеры распознавать форму, положение, направление движения, цвет и другие признаки объекта. Команды управления вводятся в робот с помощью пишущей машинки. Введенная программа корректируется в соответствии с информацией об окружающей обстановке, полученной с помощью зрения, а также тактильных датчиков. Робот ЭТЛ способен сортировать объекты по величине и форме, выполнять операции сборки и т. д.
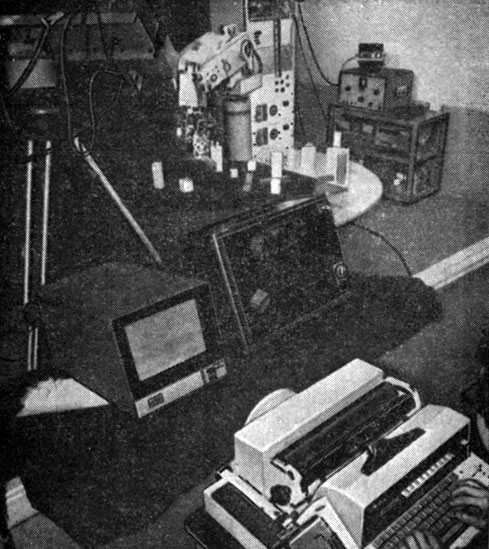
Фиг. 9.24. Робот ЭТЛ
В Центральной исследовательской лаборатории фирмы "Хитачи" разработан робот HIVIP-Mk1 (фиг. 9.25). В этом роботе используются два "глаза" в виде телекамер типа видикон. Один глаз по сборочному чертежу распознает трехмерные объекты. Это распознавание включает форму, число и способы взаимного сопряжения деталей, из которых необходимо собрать объект. Второй "глаз" рассматривает группу расположенных на столе предметов и распознает их положение, вид, размеры и т. д. Робот сравнивает результаты распознавания чертежа и предметов, оценивает их и определяет порядок сборки. Исполнительным механизмом робота является манипулятор с 7 степенями свободы.
Фиг. 9.25. Робот HIVIP-Mk1
3) Датчики внутренней информации. Точное выполнение и повторение технологических операций являются непременным условием работы промышленного робота. С этой целью в промышленных роботах обычно используются сервомеханизмы с обратной связью.
На фиг. 9.26 показана схем,а такого сервомеханизма. Главный контур сервомеханизма включает датчик обратной связи, усилитель, привод и нагрузку. Датчиками внутренней информации мы называем устройства, предназначенные для определения линейных положений, углов поворота и т. д. кисти, руки, опорных механизмов и других узлов, являющихся IB данном случае объектами управления.
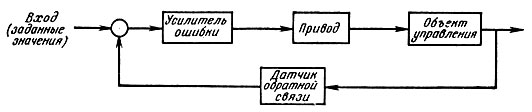
Фиг. 9.26. Схема сервомеханизма
В качестве датчиков внутренней информации применяются проволочные потенциометры, сельсины, резольверы, аналого-цифровые преобразователи и другие устройства. Однако часто сервомеханизмы в роботах отсутствуют. В этом случае управление осуществляется по принципу "включено-выключено" предварительной установкой точек позиционирования. При этом в качестве датчиков внутренней информации используются предельные выключатели, бесконтактные переключатели, фотореле и т. д.
Датчики выбираются соответственно методу управления роботом. Прежде всего определяется, каким должен быть тот или иной датчик - аналоговым или цифровым. Рассматриваются вопросы требуемой точности датчиков, линейности их характеристик и т. д. Кроме того, существует еще ряд требований, предъявляемых к датчикам обратной связи промышленных роботов:
- Высокая надежность, т. е. большой срок службы, исключение поломок, отсутствие необходимости в дополнительной защите.
- Малогабаритноеть и простота конструкции. Датчики должны иметь малые габариты, так как они монтируются на схватах, руках, опорах передвижения, т. е. в местах, где площадь для установки датчиков ограничена. Они должны быть просты по конструкции и не требовать каких-либо дополнительных устройств.
- Помехоустойчивость, т. е. возможность эксплуатации в условиях электрических помех, колебаний напряжения и частоты.
- Устойчивость к изменениям параметров окружающей среды - температуры, влажности, вибрации.
- Независимость входных и выходных цепей.
- Простота юстировки в условиях ограниченной площади обслуживания.
- Возможность абсолютного отсчета перемещений.
- Малая стоимость.
Датчики положения в большинстве случаев преобразуют перемещения в электрические сигналы. Такие датчики существуют следующих типов: резистивные, индуктивные, электромагнитные, емкостные, фотоэлектрические.
а) Потенциометр - это электромеханический преобразователь, выходной сигнал которого представляет собой произведение входного сигнала на угол поворота.
Существуют различные типы потенциометров: резистивные, емкостные, индукционные, но обычно, говоря о потенциометрах, имеют в виду потенциометры рези-стивного типа.
Резистивные потенциометры подразделяются на проволочные и пленочные. Среди последних имеются уголь-нопленочные, металлопленочные и плаетиковопленочные потенциометры. Они отличаются малогабаритностью, высокой разрешающей способностью и возможностью применения в условиях высоких температур. Имеются также потенциометры многооборотные и линейные.
Среди обычно применяемых потенциометров есть - устройства с нелинейностью не более 0,1 - 1%, а у специального класса - 0,01%. Разрешающая способность потенциометров линейного типа 0,05-0,005%, пленочных - в 10-100 раз выше.
Надежность потенциометров из-за наличия контакта, как правило, невысокая. Максимальный срок службы 2 млн. оборотов. В Японии существует более десяти фирм - изготовителей потенциометров. Выпускаются различные потенциометры высокой точности, от самых малых до крупных. Стандартными являются величины сопротивлений 10-100 кОм; выпускаются также потенциометры со специальными техническими данными, например потенциометры с нелинейными характеристиками.
б) Сельсины представляют собой электромеханические устройства, которые применяются для определения и передачи углов поворота. В конструкции сельсина используется принцип работы трансформатора. Первичная обмотка сельсина питается однофазным напряжением. Напряжение, индуцированное во вторичной обмотке, определяется углом поворота.
Конструкция сельсина сходна с (конструкцией электрического двигателя. Сельсин никогда не используется автономно, а работает в комплексе с другими устройствами.
В зависимости от способа применения сельсины подразделяются на силовые и измерительные. И в том, и в другом случае используются генераторы колебаний, приемники, дифференциальные сельсины, трансформаторы и другие устройства. При необходимости определения углов поворота с высокой точностью применяют измерительные сельсины, преобразующие утлы поворота в электрические напряжения.
Сельсины как устройства, основанные на принципе электромагнитной индукции, обладают высокой надежностью, помехоустойчивостью, независимостью входных и выходных цепей. Однако точность сельсинов ограничена значением ±0,5°, что не позволяет использовать их по одному и ведет к увеличению стоимости. Для повышения точности применяются двухскороетные сельоинные передачи. Например, если повысить скорость сельсина в 10 раз, точность отсчета соответственно повышается до ±0,05°. В качестве специальных устройств можно использовать .многофазные сельсины с преобразованием углов в дискретные величины. Такой способ может найти широкое применение. Сельсины выпускаются на частоты 50, 60, 400 Гц и напряжения 115 и 26 В.
в) Резольверы. Резольверы были разработаны позднее сельсинов и превосходят их по своим возможностям. В них также используется принцип электромагнитной индукции. На статоре и роторе резольвера располагаются по две обмотки, сдвинутые в пространстве на 90°.
Существуют различные способы применения резольве-ров. В качестве устройств передачи угла они сходны с сельсинами и используются в комплексе с генераторами колебаний, приемниками, трансформаторами. Точность у резольверов выше, чем у сельсинов. Для повышения точности передачи угла можно использовать двухско-ростную систему. Резольверы можно применять в цифро-аналоговых преобразователях дискретных величин в углы поворота. Выпускаются резольверы на частоты 50, 60, 400 Гц и напряжения 26 и 60 В. Резольверы выпускаются многими фирмами.
г) Индуктивные датчики. Так же, как и сельсины, индуктивные датчики основаны на принципе электромагнитной индукции. Отличие их заключается в том, что в этом случае с помощью индуктивного датчика в электрическое напряжение преобразуется линейное перемещение. Датчик состоит из первичной обмотки и двух вторичных, включенных навстречу друг другу. При перемещении якоря реактивные сопротивления вторичных обмоток изменяются и на выходе появляется напряжение. При частотах 50-10 кГц можно получить максимальную чувствительность порядка 5 В/мм; обычно чувствительность лежит в пределах 0,1-2 В/мм. Шаг датчика устанавливается изготовителем, но, как правило, он не превышает 10 см. Точность порядка 1% от величины шага. Габариты датчика растут с увеличением шага. Стоимость его высокая. За исключением специальных случаев, индуктивные датчики в сервосистемах не применяются.
д) Генераторы импульсов. Генератор импульсов является цифровым датчиком, выдающим импульс на каждую единицу перемещения. Генераторы импульсов бывают двух типов: фотоэлектрические и электромагнитные. В фотоэлектрических генераторах на дисках, соединенных с осью вращения, имеются прозрачные и непрозрачные участки. В качестве источников света используются лампы или другие элементы, а в качестве регистрирующих элементов - фототранзисторы, гелиевые элементы и другие устройства. Имеются генераторы, основанные на принципе интерференции. Выпускаются такие генераторы с разрешающей способностью 100-3000 импульсов на один оборот. Среди электромагнитных генераторов имеются устройства, сходные с фотоэлектрическими, но есть и такие, которые можно применять только при высоких скоростях вращения. Существуют генераторы импульсов с разрешающей способностью 6000 имп/об, однако в качестве датчиков положения можно использовать генераторы с разрешающей способностью до 1000 имп/об. Для фотоэлектрических генераторов на лампах проблему составляет надежность, однако имеется тенденция замены ламп полупроводниковыми источниками света. В роботах, предназначенных для работы в усложненных условиях, фотоэлектрические генераторы из-за наличия в них усилителей следует применять с осторожностью.
Генераторы импульсов не дают возможности отсчитывать абсолютные значения положений. Поэтому при проектировании системы надо внимательно отнестись к возможным нарушениям отсчета вследствие электрических помех.
е) Кодовые датчики. Так же, как генераторы импульсов, кодовые датчики относятся к категории цифровых устройств. Однако в отличие от генераторов импульсов отсчет положений здесь абсолютный. Выходной сигнал кодового датчика имеет цифровую форму. Существует много конструкций датчиков щеточного типа, где значениям 1 и 0 соответствуют электропроводящие и изолированные участки кодовых пластин. По такому же принципу могут быть выполнены фотоэлектрические и электромагнитные кодовые датчики.
В датчиках щеточного типа применяются различные системы кодов: двоичный, Грея, двоично-десятичный, десятичный. Максимальная разрешающая способность щеточных датчиков 28. Повышение точности отсчета за счет увеличения числа оборотов датчика нецелесообразно вследствие влияния погрешностей передаточного механизма. Из-за наличия контакта щеточные датчики обладают ограниченной долговечностью. Предельный срок службы - 2 млн. оборотов.
Имеются фотоэлектрические кодовые датчики, при разработке которых была поставлена цель обеспечения большого срока службы и высокой разрешающей способности. Такие датчики выпускаются с максимальной разрешающей способностью 216. Электромагнитные датчики выпускаются с максимальной разрешающей способностью 213. Кодовые датчики дороги, но они лучше генераторов импульсов, так как обеспечивают абсолютный отсчет перемещений и более помехоустойчивы. При использовании кода Грея погрешность не превышает 1 бит. Существуют линейные кодовые датчики с разрешающей способностью 2,5 мкм. Это превосходные датчики для точных сервомеханизмов.
ж) Прочие датчики. Кроме перечисленных выше, есть много других датчиков, используемых в сервосистемах. Существуют датчики, интегрирующие скорость, подобно элетродвигателям, и используемые для специальных видов управления. Кроме того, существуют индуктосины, бесконтактные потенциометры (тензодатчики, элементы Холла), магнитные счетчики, магнитные барабаны и т. п., но в практике роботостроения они не применяются.
Общие сведения об отличительных особенностях датчиков внутренней информации приведены в табл. 9,5.
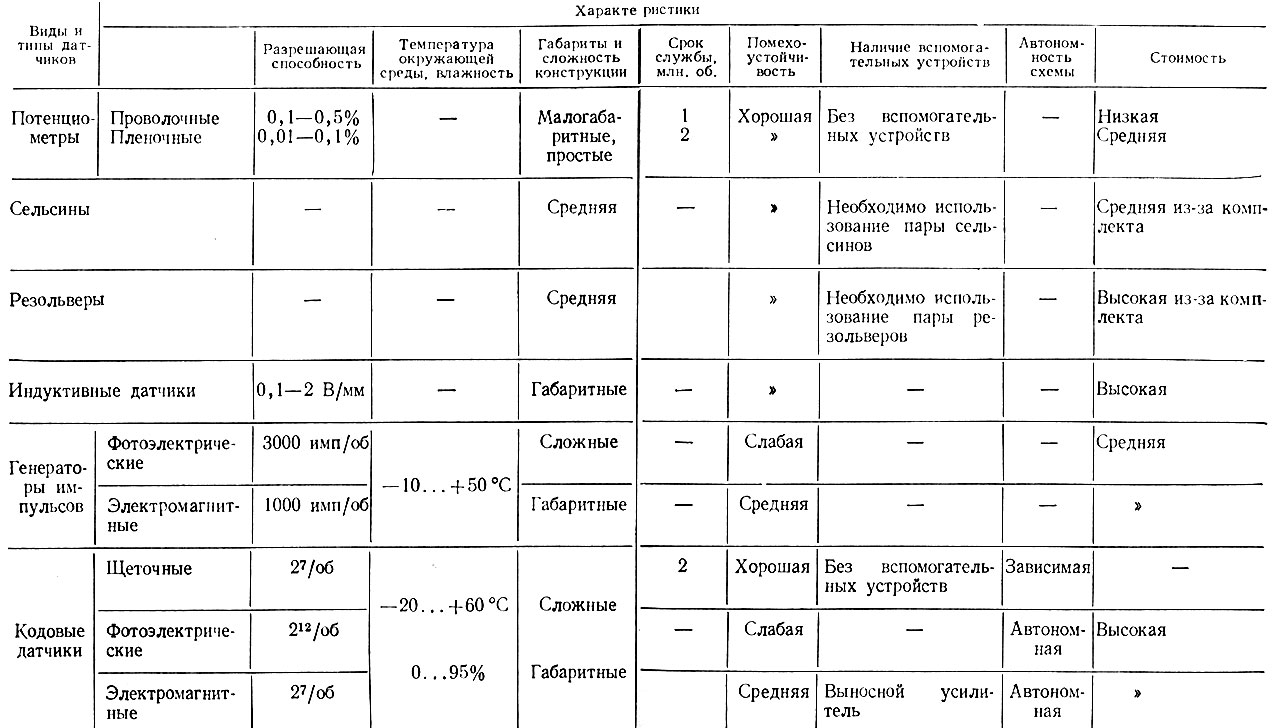
Таблица 9.5. Характеристики датчиков
В табл. 9.6 собраны сведения о датчиках внутренней информации для промышленных роботов, о которых сообщалось в Японии. В большинстве роботов положение определяется с помощью предельных переключателей. В роботах находят применение и сервосистемы, в которых используются потенциометры, резольверы, кодовые датчики.
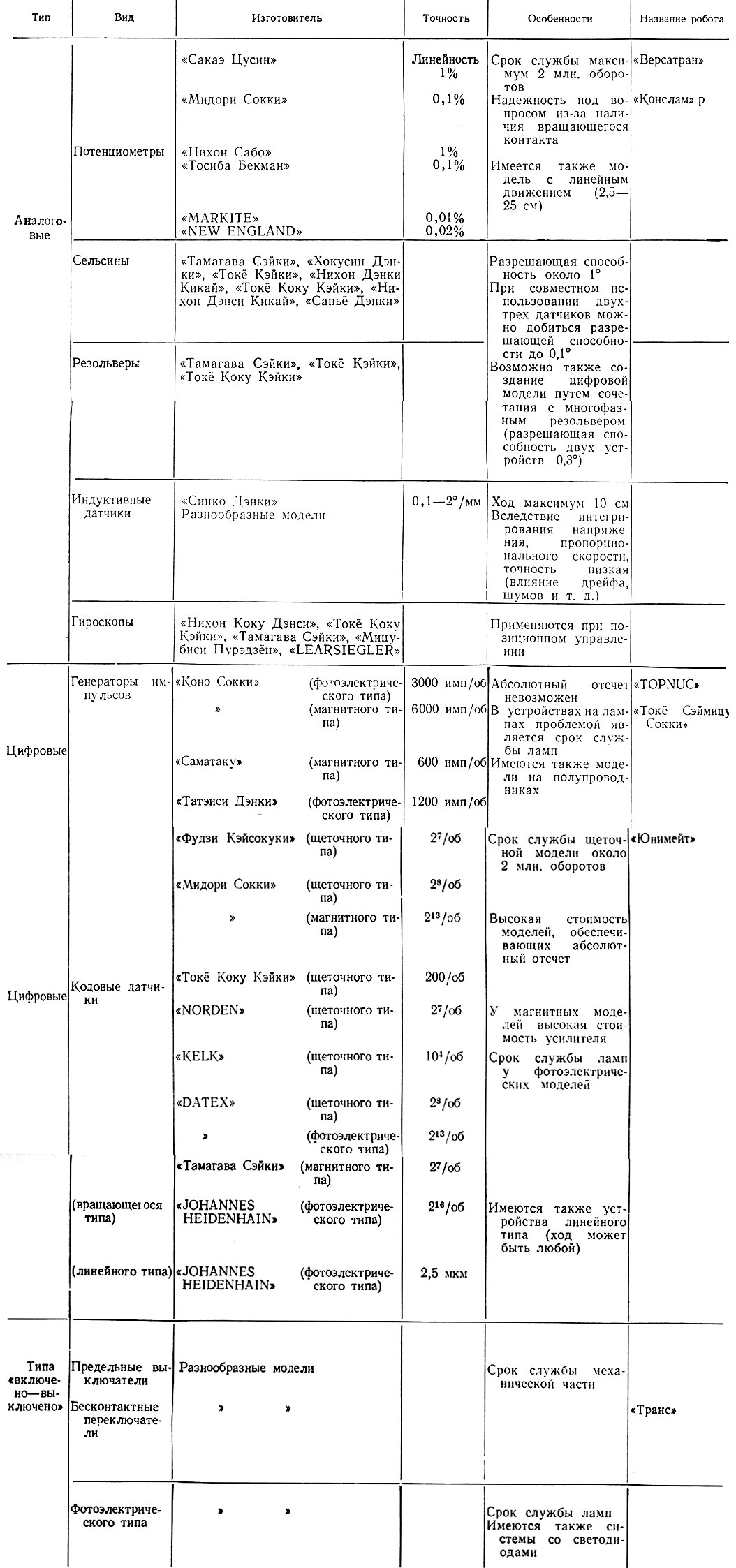
Таблица 9.6. Датчики положения
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'