9.2. "Руки" и "ноги"
1) Общий обзор. В качестве объектов обследования были выбраны "руки" и "ноги" современных промышленных роботов, о которых уже сообщалось в литературе, а также механизмы, которые, судя по возможностям современной техники, будут, вероятно, производиться в ближайшем будущем. В основу классификации и обобщения материала положены функции и конструкции "рук" и "ног".
Точного определения "рук" и "ног" подобных механизмов нет. В анатомии для составляющих верхних и нижних конечностей человека используются названия, приведенные на фиг. 9.1. В дальнейшем изложении мы будем всюду пользоваться этими терминами, за исключением тех случаев, когда нам понадобится ввести иную классификацию.
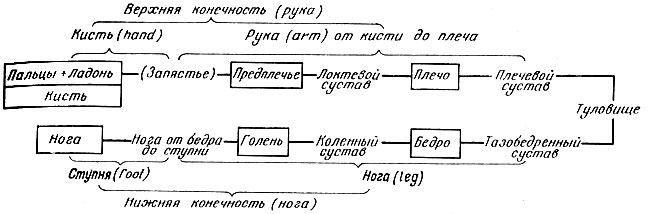
Фиг. 9.1. Названия верхних и нижних конечностей
2) Кисти рук. Кистью пользуются с целью захвата предмета, его удержания, переноса и т. д. Кисть руки человека содержит хорошо подвижные пальцы, укрепленные на ладони, и обладает высокой способностью выполнять различные операции. В повседневной жизни хорошо известны действия кисти при пользовании ложкой, вилкой, палочками для еды. Кистями наших рук )Мы выполняем и такие мунипуляции высокого класса, как поднятие стеклянных или бумажных стаканов. Примером механической руки, способной поднимать простые предметы, может служить подъемный кран с крюком. В этом случае предмет зацепляется крюком перед поднятием. Существуют также подъемники, помещающие предметы на кисть руки. К таким подъемникам относятся, например, автопогрузчики. Экскаваторы, используемые в строительстве, также можно рассматривать как "руки" ?или "кисти" для подъема и переноса грунта и т. д. Много подобных "рук" можно обнаружить и в не называемых роботами обычных машинах, которыми издавна пользуется человек.
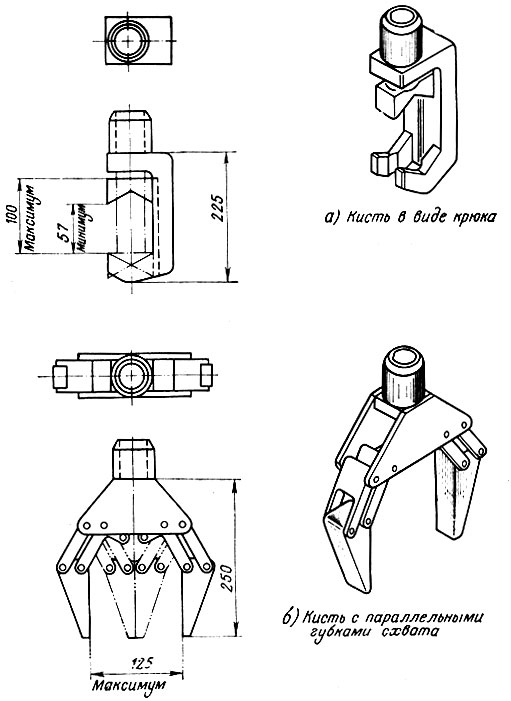
а) Кисть без пальцев. В настоящее время все устройства, "которые носят название промышленных роботов и используются как автопогрузчики и авторазгрузчики для станков, имеют руки с кистью. Самая простая рука имеет форму, показанную на фиг. 9.2; здесь предмет зажимается двумя концами двух рычагов кисти. Он как бы зажат между ладонями двух рук, а не между "пальцами" одной руки.
Фиг. 9.2. Рука со схватом
Существуют магнитные устройства, которые, подобно ладоням рук, поднимают листовые магнитные материалы. Они используются в кранах и другом оборудовании на предприятиях черной металлургии, но в промышленных роботах пока не применяются.
Для транспортировки листовых материалов независимо от того, являются ли они магнитными или нет, широко применяются вакуумные схваты. Они часто используются при транспортировке стекла, где особенно важно не повредить изделия. Такие вакуумные схваты применяются также для удержания деталей при расточке бор-штангами. Вакуумные схваты требуют специального устройства для отсоса воздуха. Если поверхность материала со стороны схвата шероховатая, имеет выступы и (впадины, то для увеличения мощности схвата в качестве устройства отсоса используют вакуумный насос. Для захвата и подъема легких предметов используют также резиновые присоски. В этом случае нет необходимости предусматривать устройство для отсоса воздуха. Один из примеров вакуумного схвата показан на фиг. 9.3.
Фиг. 9.3. Вакуумный схват для подъема листового стекла
б) Кисть с пальцами без сочленений. Среди машин, называемых промышленными роботами, больше всего таких, в которых предметы захватываются пальцеобразными приспособлениями. На фиг. 9.4 показана одна из таких конструкций, используем.ая для автоматической загрузки станков (например, токарных).
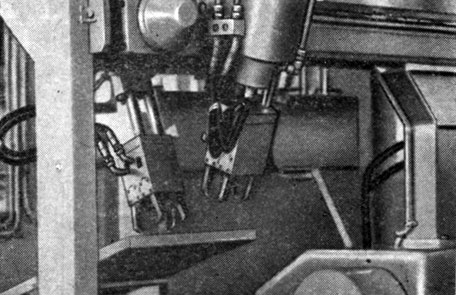
Фиг. 9.4. 'Клешня' автопогрузчика
В машинных центрах, называемых в мире станков с числовым управлением "звездами", имеются устройства для автоматической смены инструмента. В качестве механических кистей для переноса инструментов широко применяются кисти с пальцами. Один из таких примеров показан на фиг. 9.5. В данном случае транспортируемым предметом является инструмент и схвату может быть придана совершенно определенная конфигурация. Конструировать такие механические руки сравнительно просто, поскольку в этом случае нет необходимости прини-|мать в расчет многообразие транспортируемых материалов.

Фиг. 9.5. 'Клешня' ACT
На подводных аппаратах для океанографических исследований имеются манипуляторы. Они предназначены для сбора образцов и выполнения простых операций одновременно с визуальными подводными наблюдениями человека. В этом случае конфигурацию объектов, с которыми придется иметь дело манипуляторам, заранее нельзя определить. В то время как рука человека может переносить самые разнообразные предметы, круг объектов, которые могут транспортироваться с помощью механической руки, ограничен. Поэтому манипуляторы для океанографических подводных аппаратов имеют несколько сменных кистей, которые сменяются под водой в зависимости от конфигурации захватываемого объекта.
Кисти рук, установленных на девяти различных исследовательских судах, схематически показаны на фиг. 9.6. Кроме того, на исследовательских судах в запасе имеются кисть со сверлом, кисть с кусачками для перерезания проволоки, кисть с форсункой и т. д. Пример аппаратов для подводных работ показывает, что на современном этапе конструкция "руки должна быть различной для разных объектов. Обычные объекты, с которыми механические руки обращаются при загрузке и разгрузке станков и другого заводского оборудования, имеют вид круглых стержней и пластин. Механические кисти для деталей в виде брусков еще не разработаны.
Фиг. 9.6. Руки ео схватами аппаратов для подводных исследований
Фиг. 9.6. Руки ео схватами аппаратов для подводных исследований
Фиг. 9.6. Руки ео схватами аппаратов для подводных исследований
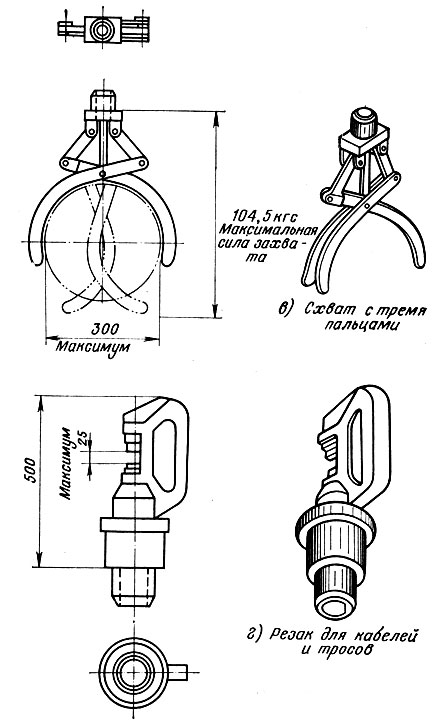
Почти все механические кисти для захвата круглых стержней содержат два или четыре противостоящих "пальца". Кроме того, изготовляются также пальцы изогнутой формы. Один из них показан на фиг. 9.7.
Фиг. 9.7. Кисть с изогнутыми пальцами
Среди кистей для работы с листовыми материалами без применения вакуумного приспособления много таких моделей, в которых "пальцы" схватывают лист с двух сторон и поднимают его. Для извлечения деталей из матрицы пресса существуют также модели схватов, которые сперва приподнимают деталь кончиками "пальцев", а затем перехватывают ее. Разрабатываются самые различные проекты схватов для извлечения деталей из матриц. На фиг. 9.8 показан один из примеров.
Фиг. 9.8. Кисть для извлечения деталей
Разрабатывается также много конструкций для извлечения деталей из литейной машины при производстве изделий из пластмасс. Обычно это схват с двумя противостоящими пальцами, но подобные схваты для извлечения тонких листовых материалов не разработаны.
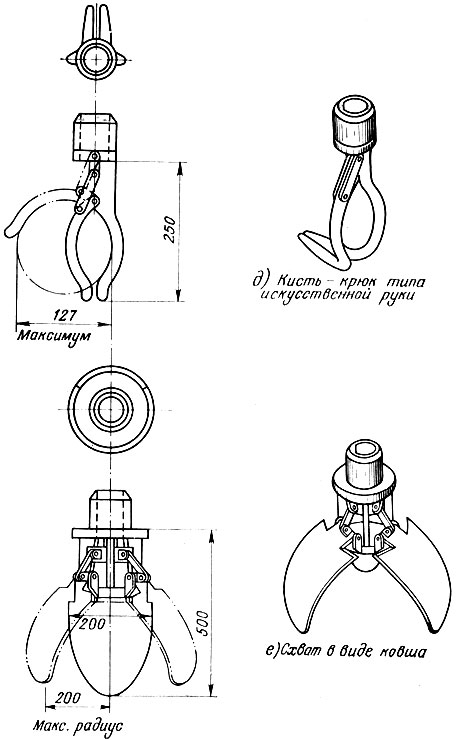
в) Схваты со многими сочленениями и прочие конструкции. Пока неизвестны конструкции схватов механической кисти со многими степенями свободы, которые имели бы многосуставную структуру, подобную пальцам человека, способным свободно изгибаться. Пример такого схвата пока можно увидеть только в протезах.
Человек в случае необходимости манипулирует предметом, пользуясь двумя руками. Промышленный робот с двумя руками также еще не разработан.
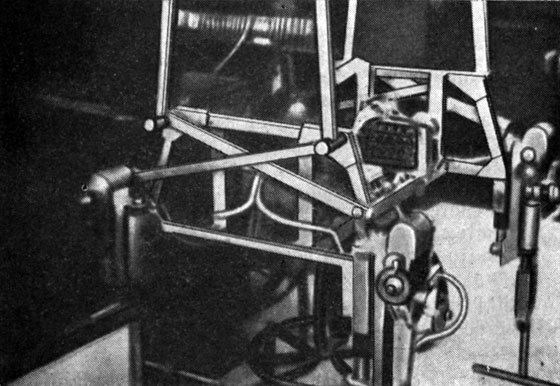
3) "Руки". Рука используется для перемещения кисти со схватом, держащим предмет. Руки бывают а) шарнирной конструкции, подобной руке человека, и б) без сочленений, использующие механизм реечной передачи, поршневой цилиндр и т. д. В автоманипуляторах, которые можно видеть на промышленных предприятиях, в настоящее время чаще встречаются конструкции второго типа. Конструкции же шарнирного типа широко распространены в ранее разработанных манипуляторах, применяемых в атомной технике и в аппаратах для подводных работ.
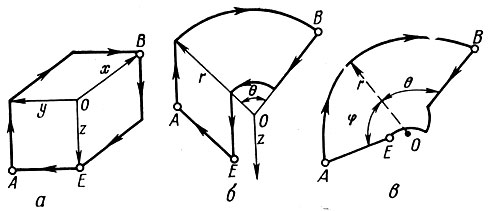
а) Рука без сочленений. Перемещение руки в пространстве может описываться в одной из трех пространственных систем координат, изображенных на фиг. 9.9. При перемещении предмета из точки А в точку В точка Е рассматривается как начало координат.
На фиг. 9.9, а приведена прямоугольная система координат. Предмет перемещается вдоль осей х, у, г. Обычно ось х соответствует возвратно-поступательному движению руки вдоль собственной оси, ось у - перемещению влево и вправо, а ось z- перемещению вверх и вниз. Такую систему прямоугольных координат часто можно наблюдать в системах станков, но в промышленных роботах она не применяется. Пример практического применения такой системы можно увидеть только в устройствах подачи заготовки к станку, где подача осуществляется через загрузочное окно. Причина этого, вероятно, заключается в чрезмерном увеличении габаритов устройства при перемещении детали по трем осям в прямоугольных координатах.
Фиг. 9.9. Пространственные системы координат
На фиг. 9.9,б показана цилиндрическая система координат. Ось r соответствует продольному возвратно-поступателыному движению руки, ось z - перемещению вверх - вниз, а направление Θ - вращению влево - вправо. В настоящее время среди промышленных роботов, которые предназначены для выполнения в производственных цехах последовательных повторяющихся операций, роботы с движением руки в цилиндрических координатах встречаются наиболее часто. Это объясняется, вероятно, небольшой площадью, которую занимает такая конструкция, так как перемещение влево - вправо выполняется просто путем поворота руки. К таким роботам относится изготовляемый в США робот "Версатран".
На фиг. 9.9,б представлена сферическая юиетема координат, в которой направление r соответствует возвратно-поступательному движению руки, направление φ - перемещению вверх - вниз, а направление Θ - перемещению влево - вправо. Один из видов такого сферического шарового соединения - плечевой сустав человека. В этом случае ось поворота в направлении ср конструктивно неотделима от оси поворота в направлении Θ. Механические устройства с системой шарового соединения пока не разработаны. Американский "Флексимэн", изготовление которого было приостановлено, являлся моделью с гибким объединенным шарниром, но не с шаровым соединением. Оси вращения для перемещения вверх - вниз и влево - вправо обычно конетруктивно разделены. Такова модель американского робота "Юнимейт". В Японии примеры подобных конструкций имеются только у двух фирм-изготовителей.
Системы с поршневыми цилиндрами для возвратно-поступателыного перемещения руки просты и широко распространены. Чаще всего ход (Перемещения регулируется с помощью механического упора. Следовательно, в период одного цикла нельзя получить два движения в одном направлении с различным ходом. Системы, в которых можно устанавливать переменную величину перемещения, выполняются с применением механизма реечной передачи. В конструкциях подобного типа существуют различные способы задания величины перемещений.
Вертикальные перемещения руки в цилиндрической системе координат в большинстве (случаев осуществляются с помощью реечной и червячной передач. В некоторых случаях величина вертикального перемещения невелика,- и при отсутствии необходимости иметь промежуточные положения используются поршневые цилиндры. Среди конструкций с поршневыми цилиндрами разрабатываются и такие, где возможна остановка в промежуточном положении.
В конструкциях, работающих в сферической системе координат, часто применяются червячные передачи. Имеются также сообщения о применении моментальных гидроцилиндров.
Помимо трех степеней свободы, соответствующих указанным выше перемещениям, обычно предусматривают также возможность поворота руки вокруг ее продольной оси. У человека такое вращение осуществляется обычно предплечьем как движение вращения внутрь и поворота наружу. В механической руке такое вращение выполняется в месте, соответствующем запястью человека. Существует большое количество моделей с поворотом на 180°.
Если обратиться к движениям руки человека, то кисть в месте запястья может поворачиваться, а также сгибаться вверх и вниз в горизонтальной и вертикальной плоскостях. Наибольшее число степеней свободы руки на участке от кисти до предплечья равно 6. Однако во многих конструкциях реализуется только одно из движений - поворот кисти вверх - вниз или вправо - влево.
б) Рука со многими сочленениями. Рука со многими сочленениями сконструирована таким образом, что дает возможность завести кисть за предмет. Это позволяет выполнять сложные движения. Руки со многими сочленениями применяются в области атомной техники и в аппаратах для подводных работ. Однако по мере увеличения количества сочленений все более усложняется управление ими. В настоящее время подобные руки используются только в манипуляторах, управляемых человеком-оператором.
Что касается зоны перемещения руки без сочленений, то во многих моделях она установлена в пределах зоны досягаемости человеческой руки (сфера радиусом около 1м). Для того чтобы получить большую зону перемещения, приходится увеличивать занимаемое роботом пространство. Например, при использовании для привода поршневого цилиндра максимально возможное перемещение при общей длине руки 3 м составляет всего 1,5 м. Уменьшение требуемого пространства возможно при использовании сгибающейся руки. При этом для получения большого хода применяют руку, имеющую сочленения.
Известна конструкция сочлененной руки, имеющей величину возвратно-поступательно го движения порядка 2 м, однако такая рука может перемещаться только по прямой линии. Она не обладает возможностью сложного перемещения, которую обычно имеет сочлененная рука.
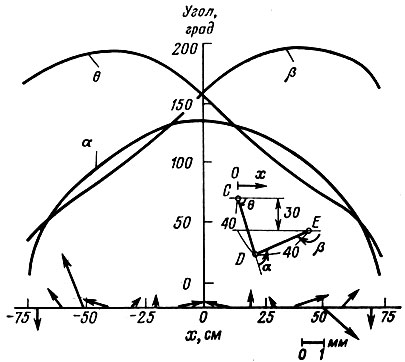
На фиг. 9.10 показана зависимость углов поворота звеньев при прямолинейном движении сочлененной руки, близкой по размерам к руке человека. В каждом шарнире был установлен датчик угла поворота с точностью отсчета 1/2°. Отклонение точки, соответствующей кисти руки, при ее движении по прямой не превышает 2 мм. Управление углами поворота звеньев очень сложно, если же требуется провести руку по сложной траектории, нельзя обойтись без ЭВМ с большим объемом памяти.
Фиг. 9.10. Зона перемещения сочлененной руки
Опытные конструкции интеллектуальных роботов имеют многозвенные руки. Таковы роботы Стэифордско-го университета, Массачусетского технологического института и др. Они выполняют сложные перемещения и управляются большими ЭВМ.
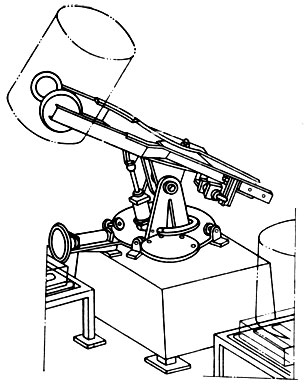
4)"Ноги". Специального изучения "ног" как опорных устройств в стационарных конструкциях не проводилось, так как в этом не иопытывалось необходимости. Что касается передвигающихся машин, используемых для перемещения предметов, то они бывают колесного и шагающего типа. Вероятно, нет особой необходимости рассматривать здесь механизмы колесного типа. Они установлены на рельсах или свободно двигаются по полотну дороги. Укажем только, что в последнее время разработаны (промышленные роботы, движущиеся при дистанционном управлении по типу подъемников с крюком; создан также крупногабаритный манипулятор, установленный на раме на гусеничном ходу, и разработан ряд других систем. Особо можно отметить многоколесную передвигающуюся машину, повторяющую своими движениями извивающиеся движения змеи; над опытным образцом этой машины работает Умэтани в Токийским тшюдотеческоэд институте.
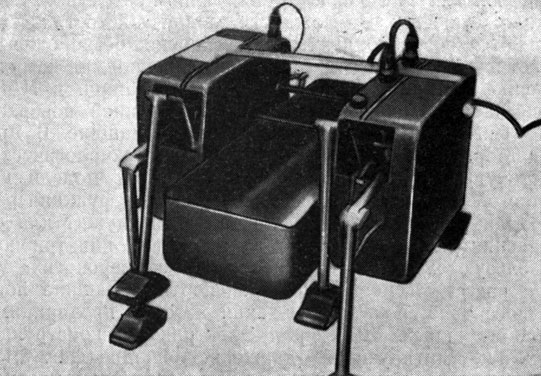
Движения шагающих машин напоминают движения живого существа. Возможности машин такого типа оказываются особенно ценными в условиях бездорожья, в болотистой местности, при передвижении по камням, гравию и т. д. Были сообщения о созданной в NASA восьминогой машине для разведки лунной поверхности (фиг. 9.11), а также о шестиногой машине. В Японии Мори с сотрудниками (Токийский технологический институт) занимается созданием опытной модели шестиногой машины. Во всех этих вариантах функции распределяются так: четыре или три ноги служат для сохранения равновесия, а остальные четыре или три ноги используются для передвижения. Из "четвероногих" машин известны следующие: транспортная машина посадочного типа, попытки создания "которой предпринимаются на фирме "Дженерал Электрик", и конструкция Мак Ги, имитирующая движение лошади (фиг. 9.12). Из "двуногих" машин фирма "Дженерал Электрик" разработала транспортную модель, а Като с сотрудниками (Университет Влсэда) успешно занимается созданием шагающего на двух ногах устройства, в котором используются гибкие искусственные мускулы, состоящие из сжимающих и растягивающих звеньев. Однако такие передвигающиеся машины шагающего типа находятся еще на стадии создания опытных образцов, и практическое их применение - дело будущего1.
1 (См. в этой связи кн. М. Вукобратовича "Шагающие роботы и антропоморфные механизмы", перевод которой готовится в изд-ве "Мир".- Прим. ред.)
Фиг. 9.11. Восьминогая машина NASA
Фиг. 9.12. Четырехногая машина, имитирующая походку лошади
5) Системы с роботами. Системы, которые рассматриваются здесь, небольшие, если имеются в виду задачи транспортировки материалов в производственных условиях. Наша цель состоит в исследовании с системной точки зрения функции каждого из приспособлений, входящих в систему, в которой сам робот играет роль одной из подсистем.
Рассмотрим действия робота как системы путем сопоставления с действиями человека (фиг. 9.13). Пусть человек решил взять какой-то предмет и поднять его. Прежде всего он отыскивает глазами предмет, затем протягивает руку и старается взять его. Если длины руки не хватает, он приближается к (предмету, переступая нотами, затем протягивает руку и берет предмет. Убедившись в том, что предмет захвачен, он поднимает его. Когда нельзя поднять предмет одной рукой, человек прибегает к помощи другой руки; подняв предмет двумя руками, он затем перемещает его в нужное место.
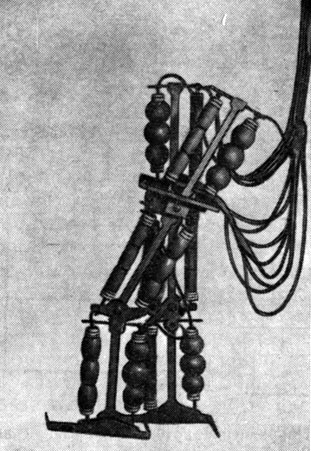
Фиг. 9.13. Двуногая машина с искусственными резиновыми мышцами
Последовательность этих действий выполняется в соответствии с (потоком информации, циркулирующим внутри системы (фиг. 9.14). Прежде всего с помощью органов чувств обследуются явления внешнего мира. Через нервную систему эта информация направляется в мозг, где она осознается. По результатам такого осознания принимается решение и определяются действия, которые необходимо предпринять. По приказам, поступающим из мозга, приводятся в движение мышцы .и начинается выполнение действия. Производится оценка, правильно ли начато действие, и если оно начато неправильно, его прекращают.
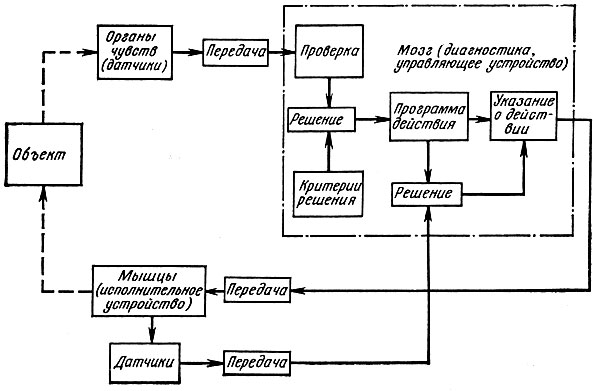
Фиг. 9.14. Направление потока информации внутри системы
В промышленных роботах, выполняющих какие-либо действия, близкие к действиям человека, должна использоваться аналогичная схема. Органам чувств человека в случае робота соответствуют различные детекторы (датчики внешней информации). Собранная в них информация направляется в устройство диагностики и управления. Это устройство в простых случаях может быть смонтировано на панели управления, например, в виде штекерной матрицы, но в некоторых случаях его роль выполняет крупная ЭВМ.
В соответствии с предварительно установленной программой действий собранная информация обрабатывается и направляется в управляющие устройства. Указания о действиях, поступающие от управляющих устройств, направляются в исполнительные механизмы, которые приводят в движение "руки" и "ноги". Величина их движения проверяется (датчики внутренней информации и обработка), и обычно при помощи устройств сравнения определяется, соответствует ли она заданной величине.
Поток такого рода информации и ее обработка представляют собой тем более важную задачу, чем более сложные функции требуются от промышленного робота. Что касается устройств, применяемых в датчиках внутренней информации и исполнительных механизмах, то в настоящее время уже имеется возможность приобрести комплектующие изделия, отвечающие требованиям потребителя с точки зрения как существующих промышленных приборов, так и механизмов, которые можно создать при современном уровне техники. При использовании в устройствах сравнения и управления современных ЭВМ можно реализовать все необходимые функции, хотя в области их программного обеспечения имеются определенные проблемы. Однако достаточно 'Совершенных датчиков внешней информации, которые могли бы использоваться в роботах в качестве детекторов, пока нет. Возможно, что несовершенство существующих датчиков особенно остро ощущается из-за явного превосходства органов чувств человека; вероятно также, что требуется усовершенствование средств программирования. Но как бы то ни было, из-за этого на пути совершенствования системы с роботами, выполняющими действия, близкие к действиям человека, пока имеются серьезные препятствия.
Человеку свойственно совершать ряд движений в виде ответных реакций; например, дотронувшись до горячего предмета, он отдергивает руку. В таких случаях 'информация, полученная органами чувств руки, по-видимому, может и без передачи ее в мозг вызвать нужную реакцию. Если принять эту точку зрения, можно подумать о том, нельзя ли до известного предела управлять действиями робота и без сложных устройств управления и сравнения.
Управление роботом, очевидно, возможно при помощи малогабаритных местных ЦВМ и несложных аналоговых вычислительных устройств. Кроме того, для решения проблем более высокого порядка можно создать системы дистанционного управления с участием человека-оператора. Принципы построения подобных систем, идеи .которых разрабатывались в области атомных и космических исследований, можно применить и в промышленных роботах. Задачей является также разработка системы коммуникации человек-робот.
"Современный промышленный робот" - это, по сути дела, автоманипулятор. Он выполняет лишь простые операции. В соответствии с программой действий он осуществляет повторяющиеся операции транспортировки деталей из одного определенного места в другое. Эти машины, функционирующие подобно человеческой руке, порождены потребностями современного общества, но широкое их использование наталкивается на ограничения, связанные с их высокой стоимостью и способностью выполнять лишь действия сравнительно низкого порядка. Однако в реальном мире их ценность все же велика; как машины, предназначенные для автоматизации труда, они полезны и эффективны.
Современные промышленные роботы почти не оснащены датчиками внешней информации. Обмен информацией осуществляется всего лишь для синхронизации действий с внешними устройствами. Содержание действий определяется заранее составленными программами; движениями управляют сигналы от запоминающего и управляющего устройств, приводящие в действие исполнительные механизмы робота. В исполнительных органах чаще используются разомкнутые системы и реже - сервосистемы с обратной связью.
Такие машины в дальнейшем, вероятно, будут широко применяться в качестве машин, заменяющих человека и освобождающих его от простых операций. В таком случае с точки зрения конструирования машин необходима стандартизация требований к техническим характеристикам такого рода машин и приборов. Необходимо также внести изменения в проектирование технологического процесса, осуществив переход от нынешних систем производства, ориентирующихся на рабочего, к системам, ориентирующимся на машины, и определить потребности основанных на этом систем. Например, существует такая проблема: какой должна быть точность возвращения в положение, в котором устанавливается деталь? Ответ не может основываться на том, что человек в состоянии совершать при этом ничтожно малые ошибки. Существуют еще такие важные факторы, как дистанция перемещения, вес и т. д. Эти количественные различия приводят к выбору различных типов исполнительных механизмов и других устройств для конкретных целей. Хотя у руки и кисти человека имеется семь степеней свободы, машина не обязательно должна обладать таким же числом степеней свободы. Конструкция "руки" сильно меняется также в зависимости от объекта манипулирования. В различных системах, образуемых путем комбинирования разных методов управления и систем привода, существуют свои трудности и проблемы.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'