10.3. Роботы с обучением
1) Краткое описание методов управления роботами с обучением. Робот с обучением, как уже было сказано выше, представляет собой машину широкого назначения для механизации и автоматизации ручных операций, снабженную устройством памяти. При воспроизведении программы робот выполняет повторяющиеся операции.
Управление робота с обучением включает в себя:
1) обучение; 2) запоминание программы; 3) воспроизведение программы; 4) отработку программы.
Обучение - это комплекс действий, необходимых для занесения в память робота программы его работы. В настоящее время обучение далеких еще от совершенства современных роботов осуществляется человеком. О степени автоматизации и эффективности робота можно судить по тому, насколько сложным является процесс обучения и каких он требует затрат времени. Чем проще и менее трудоемок процесс обучения, тем эффективнее конструкция промышленного робота.
Запоминание программы - это сохранение в течение необходимого периода времени информации, накопленной при обучении робота. Для роботов с обучением: имеются различные виды информации, которую требуется запоминать. Но в сущности, сложность операций, которые может выполнять робот, определяется объемом-его устройства памяти.
Воспроизведение программы - это считывание информации из устройства памяти и передача ее на управление исполнительными механизмами робота. Воспроизведение программы осуществляется простыми средствами, если информация считывается в определенной последовательности, и усложняется, если по условиям работы порядок считывания информации должен изменяться. Чем универсальнее промышленный робот, тем более сложного он требует устройства воспроизведения программы.
Роботу необходимы устройства позиционирования и логические блоки для выполнения операций "включено-выключено", что определяется его конструкцией и техническими параметрами. В данной главе эти вопросы не рассматриваются, поскольку о них уже шла речь в гл. 9.
Существуют различные виды информации, которую должен получить, запомнить и воспроизвести робот с обучением. Ее можно классифицировать, как показано в табл. 10.1.
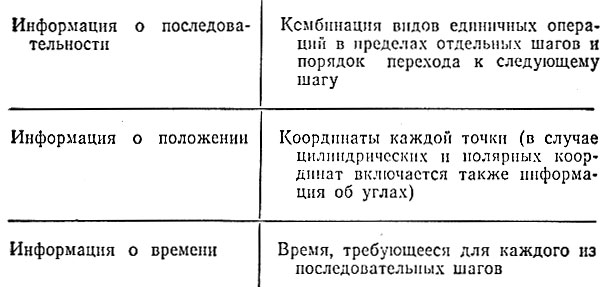
Таблица 10.1. Виды информации по управлению
С целью пояснения содержания такой информации на фиг. 10.1 показана операция высокочастотной закалки в качестве одного из примеров операций, выполняемых с помощью робота с обучением. Операция закалки состоит в следующем. С конвейера снимают деталь и помещают в высокочастотную печь, после чего включают источник тока. Через определенный промежуток времени деталь вынимают из печи, переносят и опускают в ванну для охлаждения. Эта операция состоит из 8 отдельных шагов, указанных в табл. 10.2. Каждый из них называют последовательным шагом, или просто шагом. Переход от одного шага к следующему называют переходом, а используемый при этом сигнал назьь вают сигналом перехода. Отдельные операции, выполняемые в пределах каждого шага, называют единичными операциями. Например, в табл. 10.2 единичная операция в пределах первого шага - это "захват"; в пределах второго шага выполняются две единичные операции: перемещения в точку b по осям r и Θ. Четвертый шаг - это включение источника тока и съем детали. В тех случаях, когда операция перехода выполняется с выдержкой времени, эту выдержку целесообразно также рассматривать как единичную операцию. Таким образом, шаг программы может содержать ряд единичных операций. Перед воспроизведением каждого нового шага должно быть получено подтверждение об исполнении предыдущего.
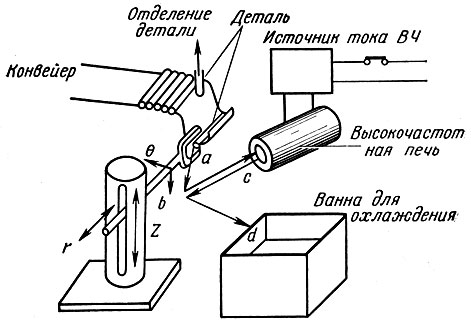
Фиг. 10.1. Пример операции, выполняемой роботом с обучением
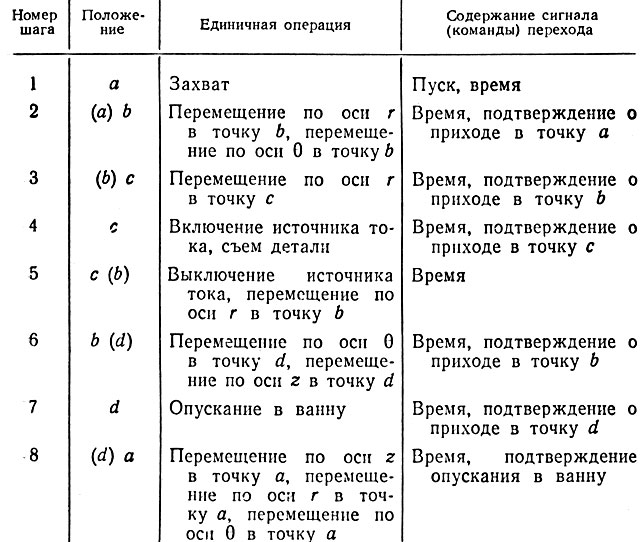
Таблица 10.2. Структура инфирмации
Обучение робота, по существу, состоит во внесении в его память информации об отдельных единичных операциях, о комбинировании этих операций в пределах каждого шага и о порядке перехода от одного шага к другому. Среди единичных операций имеются такие, когда достаточно указать вид операции, которая должна быть выполнена (например, "захват", "включение источника тока" и т. д.) и такие, когда необходимо указать не только вид единичной операции (например, "перемещение"), но и дополнительно указать его величину (линейную или угловую).
Содержанием единичной операции может быть время перехода между шагами программы, скорость перемещения, усилие захвата и т. д. Информация о положении исполнительных органов робота и временных интервалов является, по существу, аналоговой, ее объем обычно бывает большим. В противоположность этому информация о последовательности воспроизведения программы, т. е. информация о комбинации единичных операций в пределах шага и о порядке переходов между шагами, является дискретной.
Таким образом, информация, с которой обычно имеют дело в роботах с обучением, состоит из трех видов, как показано в табл. 10.1, а именно из информации о последовательности, информации о положении и информации о времени. В ряде случаев требуется запомнить аналоговую информацию о скорости, усилии и некоторых других величинах.
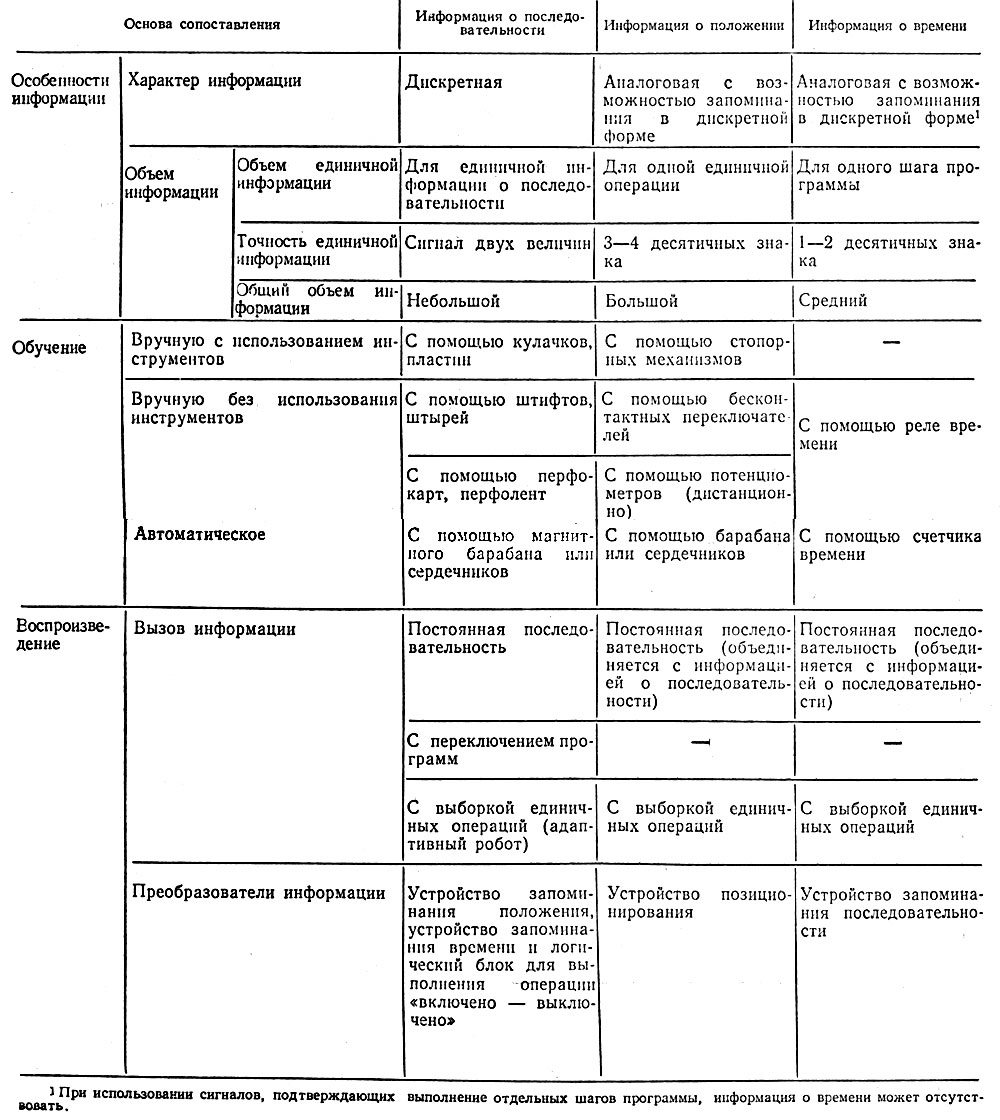
Таблица 10.3. Особенности и различия отдельных видов информации
В табл. 10.3 собраны воедино сведения о характерных особенностях трех названных видов информации и о различии между ними с точки зрения обучения робота и воспроизведения программы. Вид информации определяет и форму внесения этой информации в устройство памяти. В табл. 10.4 дана единая классификация методов управления роботами с обучением. Содержание данного раздела, по существу, является комментарием к табл. 10.4.
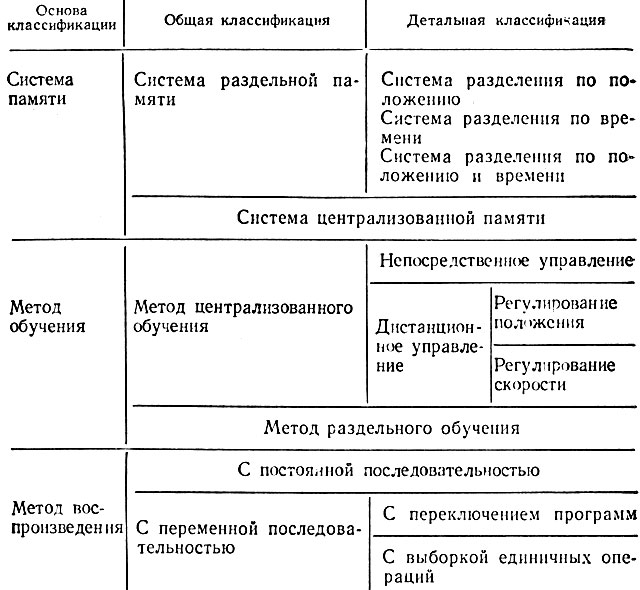
Таблица 10.4. Классификация методов управления роботами с обучением
2) Системы памяти.а) Общие сведения. В роботе с обучением, как уже говорилось, в память должна быть заложена информация о последовательности, информация о положении и информация о времени. Уточним понятие каждого вида информации на примере операции закалки, показанной на фиг. 10.1.
На фиг. 10.2 приведена блок-схема, поясняющая связь между формами запоминания каждого вида информации и методом управления роботом при выполнении операции закалки. На схеме блок запоминания информации о последовательности включает информацию о комбинации единичных операций и порядке перехода между отдельными шагами программы. Содержание памяти о последовательности указано на диаграмме. Здесь по горизонтали отложены последовательные шаги, по вертикали - единичные операции. Единичные операции 1-9 представляют собой отдельные движения руки робота. Например, единичной операции 1 соответствует информация "прийти в точку а по оси z".
Части последовательных шагов, показанные на диаграмме жирными линиями, соответствуют информации, означающей исполнение ("делай ...."), обозначенные тонкими линиями - запрещение ("не делай ...."). Перемещения в точки Ь, с и d вдоль координаты z составляют одну единичную операцию 2, поскольку значения координаты z для этих точек одинаковы. Единичным операциям 10-12 соответствует информация, связанная с режимом управления при выборке единичных операций. Единичным операциям 13-15 соответствует информация о порядке включения устройства запоминания времени.
На фиг. 10.2 жирные линии, нанесенные на единичных операциях 1-12, не обозначают в действительности само действие, а показывают лишь состояние. Например, они не означают "захватить", а показывают "захвачено". Напротив, на единичных операциях 13- 15 знак "-" обозначает не состояние, а само действие и имеет смысл "начинать".
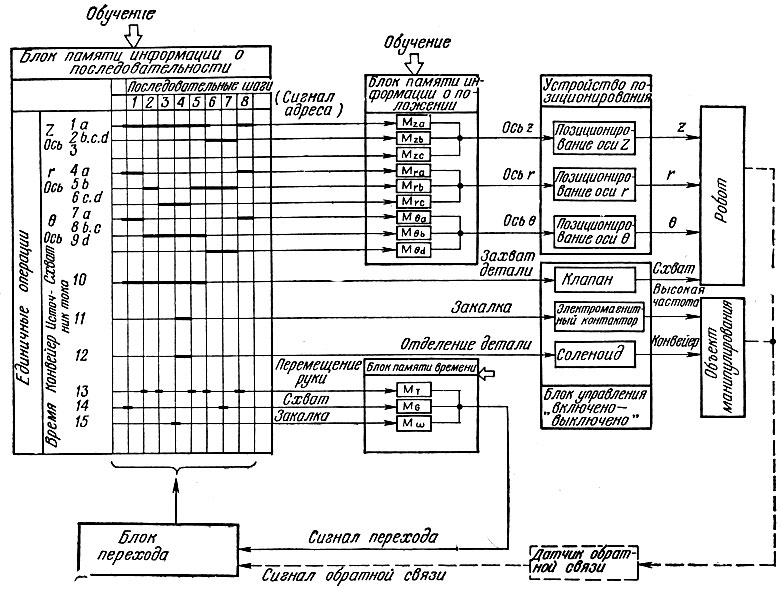
Фиг. 10.2. Блок-схема управления роботом 'Версатран'
Сигнал, посылаемый из устройства запоминания последовательности в устройство запоминания положений, в сущности, является адресным сигналом вызова; в период времени, когда включен такой сигнал вызова, соответствующая ему информация, заложенная в память, посылается как заданная величина в устройство позиционирования.
Блок запоминания времени выполняет следующую роль: получив сигнал начала отсчета от блока запоминания информации о последовательности, он по прошествии заложенного в его память времени подает сигнал перехода к следующей операции.
Таким образом, в роботе с обучением необходимы блоки памяти по крайней мере для трех видов информации, отличающихся ,как по своему характеру, так и по объему.
Систему памяти, при которой информацию заносят в отдельные блоки, называют раздельной. При объединении блоков в единое устройство систему памяти называют централизованной. Систему раздельной памяти в свою очередь можно в зависимости от Tord, какая информация разделяется, подразделить на систему разделения по положению, систему разделения по времени и систему разделения по положению и времени. В табл. 10.5 приведена единая классификация систем памяти. Система разделения по положению - это такая система, когда в одно устройство памяти закладывают только информацию о положении, а информацию о последовательности, времени и т. д. собирают вместе и закладывают в другое устройство памяти. Подобная система памяти реализована в роботе "Версатран" с позиционной системой управления (РТР).
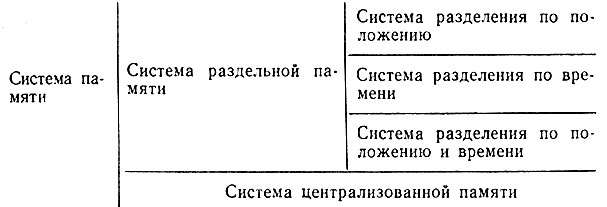
Таблица 10.5. Классификация систем памяти
Система разделения по времени - это система, при которой отдельно закладывают в память только информацию о времени, а всю остальную информацию объединяют. Практическими примерами применения такой системы являются роботы "Юнимейт" и "Кавасаки Юнимейт".
Система разделения по положению и времени заключается в том, что информацию о положении, времени, последовательности и прочую разделяют "между собой и заносят в три и более вида запоминающих устройств. Кроме робота "Транс", выпускаемого фирмой "Тосиба Сэйки", есть много других примеров практического применения подобной системы памяти.
У каждой из этих систем есть свои преимущества и недостатки. Ниже каждый вид системы памяти рассмотрен более подробно.
б) Система разделения по положению. Среди информации о положении, последовательности и времени объем информации о положении намного больше, чем прочей информации. Объясняется это тем, что информация о положении является по своей природе аналоговой, при этом количество положений, которые необходимо запомнить, и к тому же с достаточно высокой точностью, очень велико.
Накопление в специальном устройстве памяти только информации о положении, а всей прочей информации в другом устройстве является отличительной чертой системы разделения по положению. В качестве устройств запоминания положения часто применяют стопорные механизмы, бесконтактные выключатели, потенциометры и т. д. Как устройства они очень просты, но имеют ограничения в отношении количества точек, которые они могут запомнить. В качестве устройств запоминания информации о последовательности и времени попользуют барабаны с постоянной скоростью вращения, выполняющие, по существу, роль реле времени. Они просты по конструкции, но в них затруднено изменение интервалов времени между последовательными шагами программы.
Конкретным примером реализации системы разделения по положению являются робот "Версатран" с позиционной системой управления американской компании AMF и робот "Консларм" фирмы "Иоикавадзима Харима Дзкжогё".
На фиг. 10.3 приведена блок-схема системы управления робота "Версатран". В данном случае в качестве устройств запоминания положения используются потенциометры. Потенциометры же используются в сервоприводе в качестве датчиков положения. Перемещению руки в одном направлении на фиг. 10.3 соответствует 6 потенциометров памяти положений. За счет различных комбинаций потенциометров памяти можно реализовать довольно большое количество точек позиционирования руки робота.
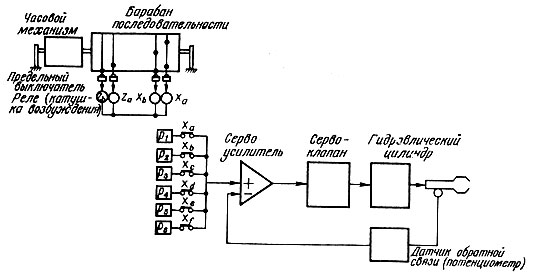
Фиг. 10.3. Блок-схема систем управления
Вся остальная информация запоминается на барабане последовательности. Развернутая диаграмма такого барабана показана на фиг. 10.4. По горизонтали записаны комбинации видов единичных операций, а по вертикали - информация о последовательности и времени.
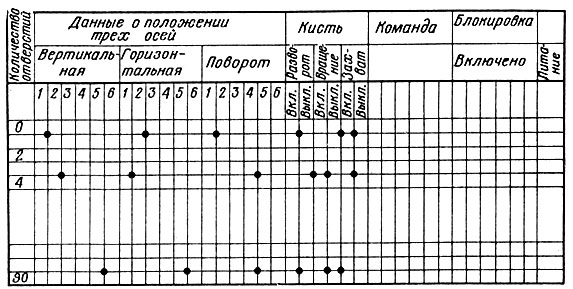
Фиг. 10.4. Диаграмма барабана последовательности
Информация о времени определяется количеством отверстий, приходящихся на один шаг программы. Требуемое количество отверстий рассчитывают, пользуясь графиками, на которых для каждой оси руки указаны величины перемещений и соответствующие им значения времени t Количество отверстий п определяют по формуле
где Т - время цикла. Затем в соответствии со значением n устанавливают штырыки в отверстия на барабане.
При воспроизведении программы барабан вращается с постоянной скоростью, проходя все позиции от 0 до 90 и заставляя штырьки воздействовать на предельные переключатели (см. фиг. 10.3). Переключатели в свою очередь выбирают соответствующие им потенциометры памяти положений, управляющие сервоприводами.
Применение барабана определяет использование робота в основном для выполнения операций с постоянной программой. Однако имеется возможность и переключения программ, если разделить поверхность барабана на отдельные части, например на две: позиции 0-45 - одна программа, позиции 46-90 - другая. Также на две группы делят и предельные переключатели, как показано на фиг. 10.5, и переключают их с помощью специального сигнала изменения программы.
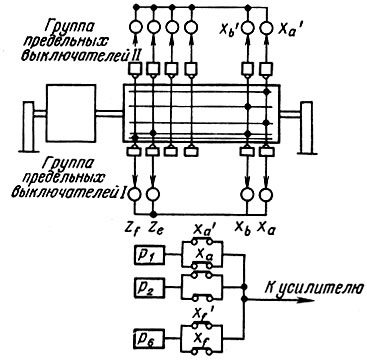
Фиг. 10.5. Метод переключения программ
Необходимость расчета количества отверстий для каждого шага программы является недостатком описанной выше системы; в целом процесс обучения в этом случае оказывается достаточно сложным. Однако у этой системы есть и преимущество, связанное с тем, что вследствие вращения барабана с постоянной скоростью нет необходимости в сигналах перехода между отдельными шагами программы.
в) Система разделения по времени. При такой системе выделяют только информацию о времени, а прочую информацию - о последовательности и положении - при занесении в устройство памяти объединяют, В этом случае информация о положении для всех единичных операций заносится в память в последовательности, соответствующей порядку операций, поэтому нет необходимости еще раз заносить в память порядок последовательных шагов. Информация о положении для каждого из последовательных шагов должна'быть полной, т. е. содержать сведения о позиционировании робота по всем степеням свободы, причем если информация для ряда шагов совпадает, ее необходимо повторять.' (Заметим, что при системе разделения по положению в этом случае число потенциометров можно сократить.)
Конкретным примером реализации системы разделения по времени является управление рукой и кистью робота "Юнимейт" компании Unimation. Общая блок-схема такой системы показана на фиг. 10.6. Информация о положении и о последовательности здесь записана на магнитный барабан как одно целое. На всех осях установлены фотоэлектрические кодовые датчики. Фактические положения по всем осям преобразуют в цифровые сигналы, которые записываются в память та магнитном барабане. Таким образом, оказывается, что информация о положении и последовательности заносится в память как одно целое.
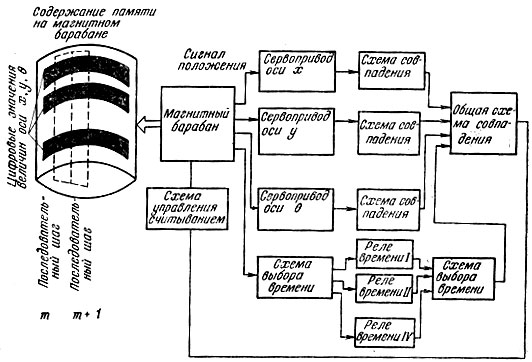
Фиг. 10.6. Блок-схема системы разделения по времени
Информация о времени запоминается группой реле времени отдельно от магнитного барабана. Однако синхронизирующий импульс пуска реле времени вводится в память на магнитном барабане. Сервопривод каждой степени свободы робота содержит схему совпадения, осуществляющую сравнение заданного положения с фактическим. Переход к следующей позиции (адресу) магнитного барабана происходит в момент прихода сигнала, подтверждающего совпадение заданных и фактических положений по всем степеням свободы.
Блок-схема сервоприводов осей х, у, ..., Θ показана на фиг. 10.7. Сервоприводы имеют цифро-аналоговую структуру. В датчиках обратной связи и устройстве памяти используются сигналы в цифровой форме, наиболее удобной для записи на магнитном барабане; для управления исполнительным и мехaнизмами (гидроцилиндрами) используются сигналы в аналоговой форме.
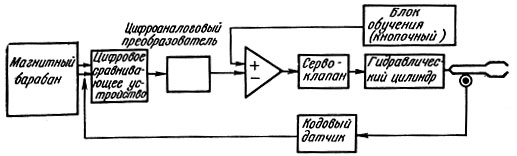
Фиг. 10.7. Блок-схема цифро-аналогового сервопривода
Использование кодовых датчиков позволяет записывать на магнитный барабан цифровые сигналы, соответствующие абсолютному значению положений.
Во время обучения оператор нажимает кнопки управления, показанные на фиг. 10.7, и перемещает руку робота в определенные положения. Эти положения последовательно заносятся в память на магнитном барабане. При этом схемы сравнения и цифро-аналоговые преобразователи не используются и, следовательно, сервоприводы работают в разомкнутом режиме.
При воспроизведении программы сигналы в цифровой форме со сзем сравнения преобразуются в аналоговые с помощью цифро-аналоговых преобразователей, усиливаются и подаются на сервоклапаны, управляющие гидроцилиндрами. В этом случае сервоприводы работают в замкнутом режиме.
На фиг. 10.8 схематически показана развертка магнитного барабана для иллюстрации способа переключения нескольких программ. С этой целью на барабане предусмотрены дорожки, на которых в конечных точках программ записываются сигналы пуска и остановка, необходимые для их переключения.
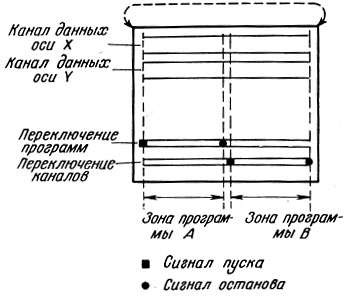
Фиг. 10.8. Развертка магнитного барабана
Недостатком системы разделения по времени является необходимость иметь устройство с большим объемом памяти, так как на каждом из последовательных шагов в памяти заносят информацию о положении для всех степеней свободы робота. В отношении обучения система разделения по времени имеет преимущество, так как сам процесс обучения автоматизируется, хотя при нем и приходится поочередно производить обучение робота всем единичным операциям.
Несколько усложняет систему использование сигналов как в цифровой, так и в аналоговой форме, однако это удобно с точки зрения перспективы управления роботами с помощью вычислительных машин.
г) Система разделения по положению и времени. Это система, когда информацию о положении, времени, последовательности и прочую закладывают каждую в отдельный блок памяти. Благодаря этому появляется возможность выбора блоков памяти, наиболее соответствующих каждому виду информации. В целом устройство памяти можно сделать достаточно простым. Вследствие этого данная система используется в большинстве простых по конструкции роботов с обучением. С другой стороны, такая система делает процесс обучения более трудоемким, так как приходится вводить информацию в блоки памяти трех видов. Но этот недостаток можно устранить автоматизацией части обучения или всего процесса в целом. Преимуществом системы является то, что возможно запоминание сложных операций устройством с небольшим объемом памяти, так как эффективность его использования высокая.
В табл. 10.6 перечислены отдельные виды информации с конкретными примерами их реализации.
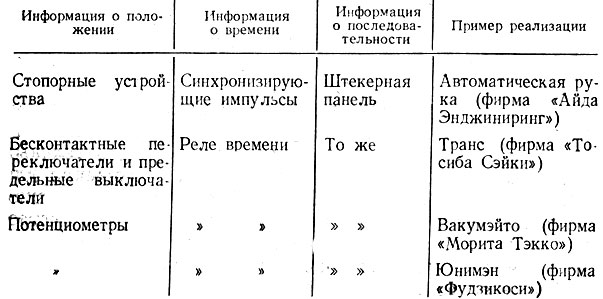
Таблица 10.6. Примеры запоминающих устройств
Оригинальным является метод управления, примененный фирмой "Фудзикоси" (робот "Юнимэн"), в котором для запоминания информации о последовательности используется бумажная лента.
На фиг. 10.9 приведена блок-схема такой системы. В данном случае для запоминания информации о положении использованы потенциометры - по 6 для каждой оси. Информация о времени запоминается с помощью нескольких реле времени. Информация о последовательности записывается на бумажную ленту, поэтому программа является фиксированной. Но заготовив в соответствии с содержанием операций несколько видов лент, можно путем их замены выполнять различные операции.
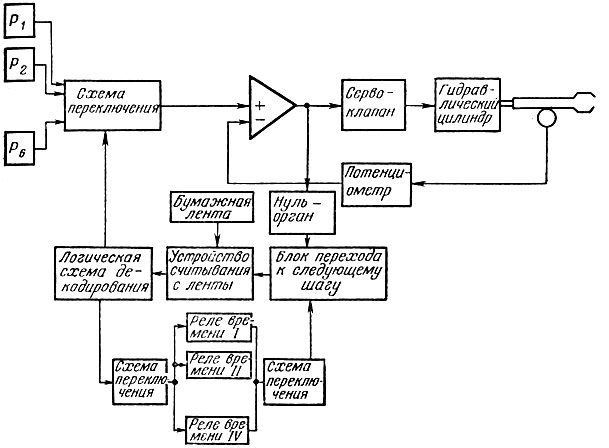
Фиг. 10.9. Блок-схема системы разделения по положению и времени
Содержание памяти на ленте аналогично содержанию памяти, вводимой на штекерной панели. Здесь также осуществляются выбор адресов потенциометров, выбор адресов реле времени и установка скорости. Информацию на бумажной ленте печатают в 8-разрядном коде EIA по методу адреса слова. По сравнению со штекерной панелью отсутствует ограничение в количестве последовательных шагов программы.
Сервоприводы здесь аналогичны тем, которые используются в роботе "Вереатран" с позиционной системой управления. Вопрос изменения программы рассматривается в разделе, касающемся методов воспроизведения, с указанием конкретного примера реализации (Промышленный робот фирмы "Токе Кэйки").
д) Система централизованной памяти. Основная особенность этой системы состоит в том, что информация о последовательности, положении, времени, скорости и т. д. вводится одновременно как единое целое в одно устройство памяти. При такой системе утрачивается гибкость в воспроизведении отдельных видов информации, но упрощаются средства обучения и воспроизведение программы.
Систему централизованной памяти обычно называют системой с непрерывным управлением (continuous path, СР). При этом информация о движении по контуру заносится в память в реальном масштабе времени. Система централизованной памяти используется в настоящее время во многих роботах. Она в большей степени, чем система с раздельной памятью, подходит для операций, где требуется плавное перемещение исполнительных механизмов робота. Можно предположить, что в дальнейшем система централизованной памяти будет применяться в роботах наряду с системой раздельной памяти, что позволит наилучшим образом использовать преимущества обоих видов памяти.
Система централизованной памяти имеет следующие преимущества:
- возможность запоминания и воспроизведения сложных операций, требующих большого объема памяти, как это имеет место и при перемещении руки робота по непрерывному контуру;
- простота аппаратуры для воспроизведения программы;
- возможность произвольного изменения скорости перемещения.
Но можно отметить и следующие недостатки:
- трудность частичной корректировки программы;
- необходимость высокой квалификации оператора, выполняющего обучение робота, поскольку технологический процесс заносится в память в виде, заданном оператором.
Системы памяти и управления можно классифицировать по видам используемых сигналов следующим образом:
- аналоговые системы;
- цифровые системы;
- аналого-цифровые системы.
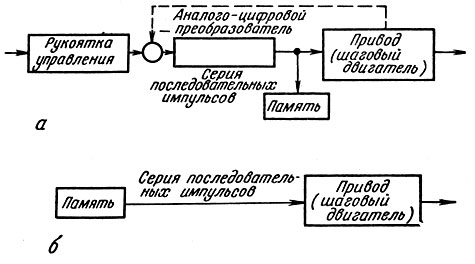
а) Аналоговая система. Это такая система, когда все виды информации запоминаются и воспроизводятся в виде амплитуд и фаз напряжений. Блок-схема аналоговой системы приведена на фиг. 10.10.
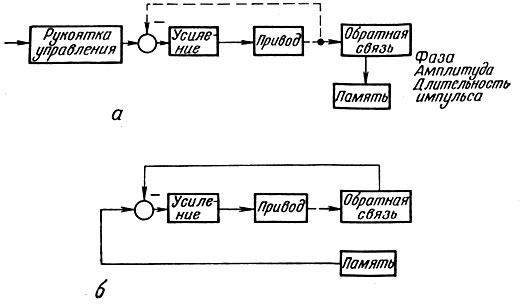
Фиг. 10.10. Аналоговая система. а - во время обучения; б - во время воспроизведения; - - - - механическое соединение; ________ Электрическое соединение
Для обучения здесь главным образом используются сервоприводы с рукоятками управления. Существуют также способы обучения с помощью разомкнутых приводов. Подробно методы обучения будут рассмотрены в разд. 3.
Существуют следующие методы ввода в память сигналов датчиков обратной связи:
1) Метод фазовой модуляции. В качестве датчиков обратной связи используются резольверы. В устройство памяти вводятся опорное напряжение и выходные напряжения резольверов. Сдвиг фазы выходного напряжения резольвера пропорционален величине перемещения по данной оси робота.
Преимуществом метода фазовой модуляции является возможность уменьшения погрешности запоминания и воспроизведения информации соответствующим подбором числа оборотов резольвера. К недостаткам метода можно отнести необходимость увеличения количества каналов памяти (на один канал больше по сравнению с числом степеней свободы робота) для запоминания опорного напряжения.
2) Метод амплитудной модуляции. В качестве датчиков обратной связи используются потенциометры, сельсины, резольверы и другие устройства. Информация вводится в память в виде амплитуды напряжения переменного или постоянного тока. Преобразование сигналов при воспроизведении информация не вызывает трудностей, количество каналов памяти соответствует числу степеней свободы, однако проблема состоит в обеспечении достаточной точности.
3) Метод широтно-импульсной модуляции (PWM). Способ получения сигналов обратной связи для ввода в память тот же, что и при методе фазовой модуляции, с той лишь разницей, что сдвиг фаз с помощью аналого-цифрового преобразователя преобразуется в длительность импульсов. Сигнал ошибки для управления сервоприводами образуется как разность сигналов воспроизведения и обратной связи.
б) Цифровая система. В этой системе оперируют с информацией в дискретной форме. Существуют три метода обращения с подобной информацией:
1) Метод разомкнутого контура (система с шаговыми двигателями). В процессе обучения робот приводят в движение подачей на приводные шаговые двигатели импульсных сигналов, модулированных по частоте (PFM) с помощью аналого-цифровых преобразователей. В это же время импульсы с выхода преобразователей вводят в устройство памяти. В этом случае отпадает необходимость в датчиках обратной связи по положению. Отработка программы осуществляется разомкнутым приводом, что упрощает конструкцию робота, однако требуется особое внимание к влиянию помех. Блок-схема разомкнутой системы приведена на фиг. 10.11.
Фиг. 10.10. Аналоговая система. а - во время обучения; б - во время воспроизведения;------------механическое
2) Метод замкнутого контура. Сигнал на управление сервоприводом формируется, как и в аналоговой системе, в виде разности выходных сигналов устройства памяти и датчика обратной связи.
Информация о положении может быть введена в устройство памяти как в абсолютных, так и в относительных единицах.
В качестве датчиков обратной связи применяются цифровые потенциометры и другие датчики импульсов, а также датчики аналогового типа в комплекте с аналого-цифровыми преобразователями. При отработке программы импульсы датчиков обратной связи регистрируются счетчиками импульсов. Разность импульсов, заданных программой и полученных от датчиков обратной связи, подается на управление шаговыми двигателями. Блок-схема замкнутой системы приведена на фиг. 10.12.
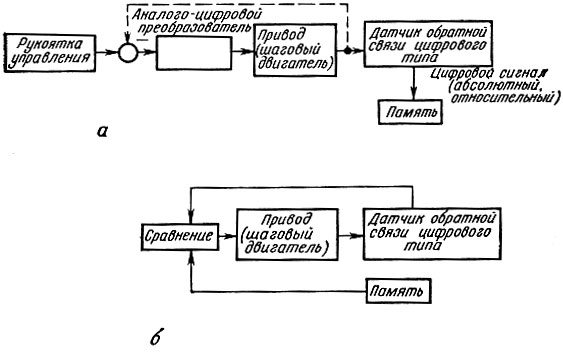
Фиг. 10.12. Блок-схема замкнутой системы. а - во время обучения; б - во время воспроизведения
Многие цифровые системы получили свое развитие на базе систем, используемых в стайках. Они позволяют получить более высокую точность по сравнению с аналоговыми системами, допускают стыковку с ЭВМ.
3) Аналого-цифровой метод. Здесь система управления приводом является аналоговой, а датчик обратной связи и устройство памяти являются цифровыми, что позволяет наилучшим способом использовать преимущества обоих методов. Блок-схема аналого-цифровой системы приведена на фиг. 10.13.
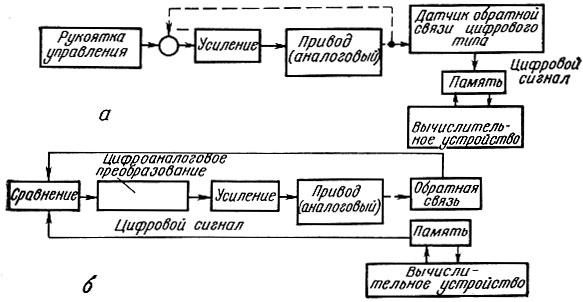
Фиг. 10.13. Блок-схема аналого-цифровой системы. а - во время обучения; б - во время воспроизведения
Система централизованной памяти требует ввода в память большого объема информации; число пригодных для этого устройств не так уж велико.
а) Магнитная лента. Магнитную ленту для ввода информации можно разделить на несколько каналов, причем возможно запоминание как аналоговых, так и дискретных сигналов. Скорость ввода и считывания информации можно ступенчато изменять. Однако при считывании аналоговых сигналов при этом изменяется их частота. В этом случае изменять скорость считывания в процессе воспроизведения программы нельзя.
б) Магнитный барабан. Запись информации можно производить также по нескольким каналам. Используется в основном для записи дискретных сигналов. Скорость также можно свободно менять, но объем памяти ограничен.
Существует несколько видов промышленных роботов (табл. 10.7), в которых используется система централизованной памяти, обеспечивающая возможность перемещения руки робота по непрерывной траектории. В качестве примера практического использования системы централизованной памяти на фиг. 10.14 приведена блок-схема системы управления робота "Версатран" фирмы AMF. В обратной связи используется метод фазовой модуляции (резольверы), для устройства памяти - метод широтно-импульсной модуляции (аналоговый метод); запоминающим устройством служит магнитная лента.
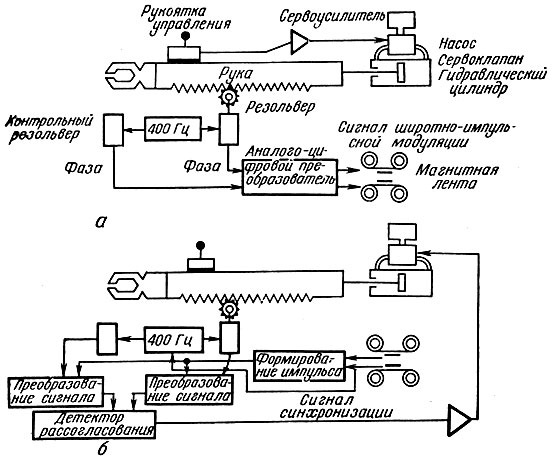
Фиг. 10.14. Блок-схема системы управления робота 'Версатран'. а - во время обучения; б - во время воспроизведения
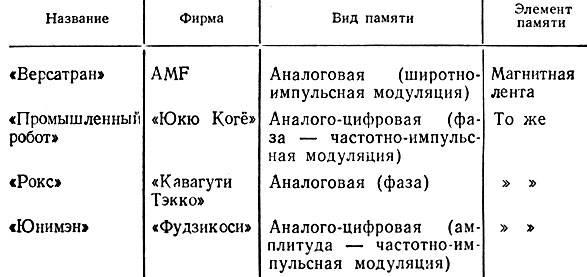
Таблица 10.7. Виды роботов, в которых применяются системы централизованной памяти
3) Методы обучения.а)Общие сведения. При рассмотрении методов обучения роботов нас главным образом интересуют следующие вопросы:
- точность воспроизведения информации;
- гибкость (количество степеней свободы);
- объем памяти;
- простота обучения;
- стоимость, включая эксплуатационные расходы;
- габариты;
- выходные сигналы.
Первые четыре вопроса особенно тесно связаны с рассматриваемыми в данной главе методами управления, но мы здесь этого касаться не будем, так как нас в первую очередь будет интересовать классификация методов обучения с точки зрения потребителей, а ее конструкторов и изготовителей роботов.
В промышленных роботах, как уже говорилось ранее, операцию делят на ряд последовательных шагов и в соответствии с порядком выполнения заданной операции вводят в главное устройство памяти виды, содержание и комбинации единичных операций на каждом из последовательных шагов. Информацию о положении, составляющую содержание единичных операций, и информацию о времени, предназначенную для передачи сигналов перехода к следующим последовательным шагам, которая, по существу, является аналоговой и требует по сравнению с прочей информацией большего объема памяти, вводят в отдельное вспомогательное устройство памяти. Имеются примеры, когда обучение информации о положении и времени в конкретных цифровых величинах осуществляется отдельно от обучения информации о последовательности шагов программы. В этом случае метод обучения принято называть методом раздельного обучения. В противоположность этому метод, при котором обучение информации о положении и времени осуществляется в соответствии с заданной последовательностью шагов программы, называют методом централизованного обучения. Методы централизованного и раздельного обучения более подробно рассмотрены в п. "б".
Особое внимание следует обратить на степень трудности обучения при том или ином методе, другими словами, на степень автоматизации процесса обучения.
Методы обучения можно классифицировать и иначе, если исходить из того, заставляет ли оператор выполнять робот при обучении требуемые действия или же он осуществляет обучение, пользуясь информацией, выраженной в словесной или цифровой форме. В первом случае мы имеем дело с методом непосредственного обучения, во вторам - с методом косвенного обучения. Эти вопросы рассматриваются в п. "в" данного раздела.
Вопросы централизованного и раздельного методов обучения до некоторой степени связаны с вопросами непосредственного и косвенного методов обучения, что показано в табл. 10.8.
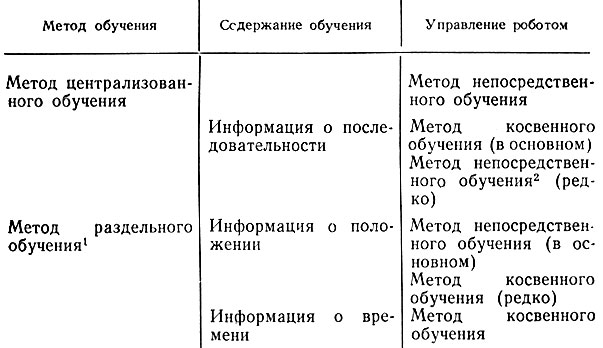
Таблица 10.8. Сопоставление методов обучения
1 (При раздельном обучении также можно считать, что существуют обучение с разделением по положению и обучение с разделением по времени, но эти случаи подобны рассмотренным выше применительно к системам памяти и поэтому здесь не рассматриваются.)
2 (Предпочтительнее считать, что можно ограничиться обучением с разделением по времени.)
б) Методы централизованного и раздельного обучения. Блок-схема устройства памяти робота с обучением приведена на фиг. 10.15.
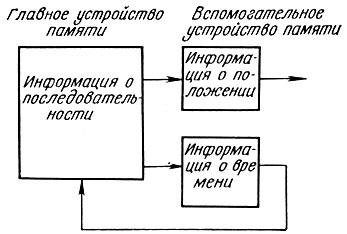
Фиг. 10.15. Блок-схема устройства памяти
1) Метод централизованного обучения. При данном методе наиболее типичным является метод непосредственного обучения с помощью рукояток управления. Суть его состоит в том, что оператор в заданной последовательности проводит обучение содержанию действий путем манипулирования рукоятками управления, и робот в тот же момент автоматически обучается конкретной информации о положении и времени. Данный метод обучения используется в роботах "Версатран" (AMF), в "Промышленном роботе" (Юкю Когё); "Роке" MARK II (Кавагути Тэкко); и "Юнимэн" (Фуд-зикоси). При методе централизованного обучения процесс обучения робота содержанию действий и последовательности выполнения единичных операций полностью автоматизируется и осуществляется достаточно просто. Такой метод обучения является наиболее совершенным.
2) Метод раздельного обучения. При методе раздельного обучения обучение информации о положении или времени осуществляют независимо от обучения информации о последовательности. Поэтому здесь, как правило, необходимо заботиться об обучении трем видам информации. С точки зрения эксплуатации робота важным моментом является степень автоматизации процесса обучения, другими словами, вопрос о том, есть ли необходимость в выполнении каких-либо действий вручную.
Рассмотрим способы обучения отдельным видам информации.
- Способ установки с использованием инструментов. Изменение информации затруднено. Обычно информация устанавливается с помощью кулачков.
- Способ установки вручную. Информация о последовательности устанавливается легко, например путем набора на штекерной панели.
- Способ полуавтоматической установки. Информация о последовательности составляется один раз, затем обучение осуществляется автоматически. Используются перфоленты или перфокарты.
- Способ автоматической установки. Информация записывается на магнитном барабане, сердечниках и т.д.
- Способ установки с использованием инструментов. Изменение информации затруднено. Обучение осуществляется установкой стопорных механизмов.
- Способ установки вручную. Информация легко вводится ручной регулировкой положения бесконтактных электромагнитных переключателей.
- Способ дистанционной установки 'вручную. Информация вводится на некотором расстоянии от робота, например с помощью потенциометров.
- Способ автоматической установки. Информация записывается на магнитном барабане или других подобных устройствах.
- Способ фиксированной установки вручную. Информация вводится поэтапно в порядке передачи сигналов о переходе к каждому из последовательных шагов.
Частичная корректировка времени в этом случае сопряжена с трудностями. Например, если осуществить обучение по времени в точках А, В, С, D, как показано на фиг. 10.16, то исправление времени t1 интервала А В оказывает влияние на содержание обучения в точках С и D. В связи с этим такой способ и получил наименование способа фиксированной установки. В качестве примера можно указать на обучение с помощью реле времени барабанного типа.

Фиг. 10.16. Пример способа поэтапной установки времени - Способ переменной установки вручную. Так именуется способ независимого обучения времени на каждом из последовательных шагов с использованием нескольких реле времени. При таком способе проще выполнить корректировку, чем при способе 1.
- Способ автоматической установки. Обучение осуществляется автоматически с использованием, например, счетчиков-хронометров.
Классификация методов обучения применительно к конкретным моделям роботов подробно рассматривается в п. "д" данного раздела.
в) Методы непосредственного и косвенного обучения. При использовании метода непосредственного обучения может проводиться:
1) централизованное обучение,
2) обучение информации о положении по методу раздельного обучения,
а при использовании метода косвенного обучения
1) обучение информации о содержании действий и об их последовательности по методу раздельного обучения,
2) обучение информации о времени по методу раздельного обучения.
При использовании метода непосредственного обучения обучение информации о положении но методу раздельного обучения фактически заключается в установке положений потенциометров или бесконтактных переключателей оператором, наблюдающим при этом за перемещением кисти робота. По этой причине данный случай обучения не требует более детального рассмотрения. То же самое можно сказать об обучении содержанию действий и последовательности при использовании метода косвенного обучения. В этом случае обучение фактически заключается в составлении перфокарт и наборе штырьков на штекерной панели. Аналогично в случае ввода во вспомогательное устройство памяти информации о времени в виде конкретных цифровых величин обучение при использовании метода косвенного обучения в действительности заключается в наборе штырьков на барабане или в регулировке уставок реле времени.
Если исключить метод централизованного обучения, во всех остальных случаях метод обучения фактически определяется выбором устройства памяти и 'Круг вопросов, требующих более детального рассмотрения, весьма ограничен.
Напротив, при использовании метода централизованного обучения в случае непосредственного обучения с помощью рукояток управления есть много вопросов, требующих дополнительного рассмотрения. Конкретные способы обучения с помощью рукояток управления можно классифицировать следующим образом:
Данный способ используется в роботах с обучением типа "Версатран" и подобных ему, в которых рука робота может перемещаться по непрерывной траектории. Обучение осуществляется оператором с помощью рукоятки управления, смонтированной на руке робота.
При обучении оператор находится в отдалении от робота. Способ дистанционного управления в свою очередь можно разделить на:
- способ управления положением. Это способ копирования перемещений с использованием модели и наблюдением за действительными движениями робота;
- способ управления скоростью. В этом случае рукоятки управления, подобные тем, которые используются при непосредственном управлении (см. п. 1), выносятся с руки робота. Сервоприводы работают в разомкнутом режиме без обратной связи по положению.
Следует обратить внимание еще на один вопрос. Обучая робот информации о положении, времени, скорости и т. д. и информации о последовательности, оператор делает это визуально, не имея возможности изменять усилие, развиваемое рукой робота. Для этого необходимы сервосистемы двустороннего действия. В современных роботах с непосредственным обучением, в которых возможно использование сервосистем двустороннего действия, они тем не менее не применяются. Поскольку в будущем, по всей видимости, применение сервосистем двустороннего действия окажется необходимым, мы рассмотрим здесь пути их реализации при использовании способов непосредственного и дистанционного управления.
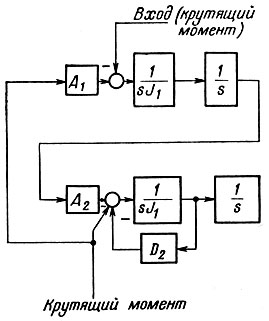
Рассмотрим сервосистему двустороннего действия применительно к одной оси робота. Схематически сервосистема изображена на фиг. 10.17, а ее блок-схема приведена на фиг. 10.18.
Фиг. 10.17. Схема сервосистемы при непосредственном управлении
Фиг. 10.18. Блок-схема сервосистемы при непосредственном управлении. А1 и А2 - коэффициенты усиления усилителей; J1 и J2 - моменты инерции; D1 и D2 - коэффициенты обратной связи. Индекс 1 означает обучение, 2 - нагрузку
Способ управления положением. Можно использовать сервосистему двустороннего действия в том виде, как она давно применяется в копирующих механизмах. Схематически сервосистема показана на фиг. 10.19, а ее блок-схема приведена на фиг. 10.20. Если выполнить такую сервосистему с использованием шагового двигателя, то узел, ограниченный на фиг. 10.20 пунктирнсл линией, представит собой один из шаговых двигателей и устройство получится несложным.
Фиг. 10.19. Схема сервосистемы при управлении положением
Фиг. 10.20. Блок-схема сервосистемы, показанной на фиг. 10.19
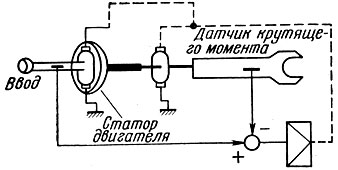
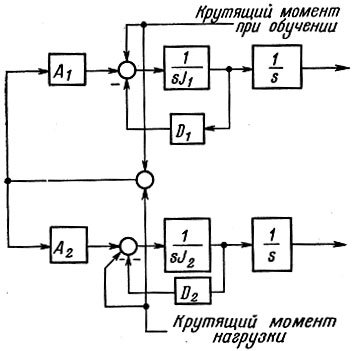
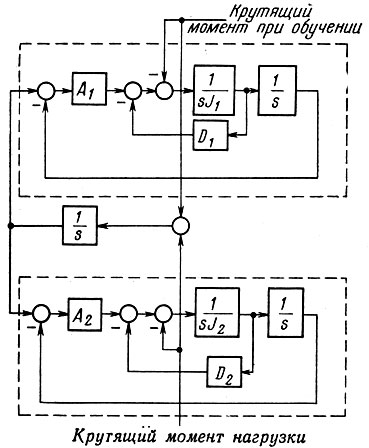
Способ управления скоростью. Сервосистема двустороннего действия схематически показана на фиг. 10.21, а ее блок-схема приведена на фиг. 10.22. При создании сервосистем для обучения роботов часто уделяют внимание максимально возможному их упрощению. В таких случаях можно при обучении использовать силовые сервоприводы, хотя они и не в полной мере отвечают требованиям, предъявляемым к сервосистемам двустороннего действия. Использование сервопривода в качестве системы двустороннего действия при дистанционном управлении показано на фиг. 10.23, а лри непосредственном управлении - на фиг. 10.24.
Фиг. 10.21. Схема сервосистемы при управлении скоростью
Фиг. 10.22. Блок-схема сервосистемы, показанной на фиг. 10.21
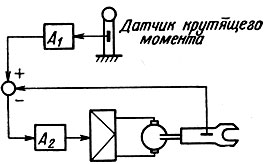
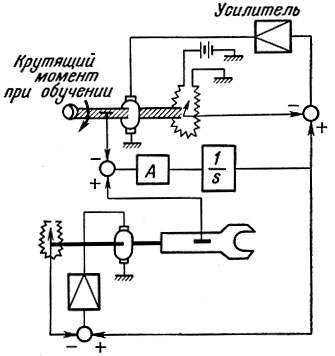
Фиг. 10.23. Обучение с помощью сервосистемы крутящего момента (дистанционное управление)
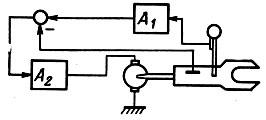
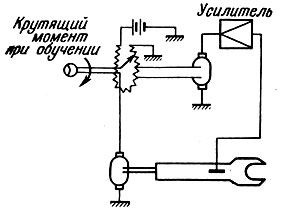
Фиг. 10.24. Обучение с помощью сервосистемы крутящего момента (непосредственное управление)
г) Автоматизация обучения при помощи ЭВМ. Есть два способа расширения функциональных возможностей существующих в настоящее время роботов с обучением. Первый способ состоит в том, что информацию о последовательности воспроизводят по методу произвольной выборки и этим повышают приспособляемость робота к окружающей обстановке. Второй способ состоит в добавлении к содержанию единичных операций аналоговой информации о скорости, силе захвата и т. д. Первый способ рассматривается в разделе об адаптивных роботах с обучением, здесь же речь пойдет о втором способе.
Можно отметить, что, если пытаться заложить в память робота по методу раздельного обучения информацию об изменении скорости и информацию о силе захвата, которая носит аналоговый характер, то не только потребуется вспомогательное устройство памяти для отдельного введения такой информации, но и усложнится, также все устройство управления, так что более выгодным станет применение цифровой ЭВМ. Таким образом, управление с помощью ЭВМ становится необходимым при возрастании объема информации. Можно предположить, что в будущем подобный метод управления получит широкое развитие. Поэтому дальнейшие пояснения даются путем сопоставления с роботами, обучение которых осуществляется применяемым в настоящее время методом раздельного обучения. Кроме того, уточняется употребляемая в этой области терминология.
Рассмотрим метод раздельного обучения с управлением при помощи ЭВМ. С целью уточнения последующего объяснения, на фиг. 10.25 в упрощенной форме дается сопоставление устройства памяти робота с обучением и соответствующей аппаратуры вычислительной машины.
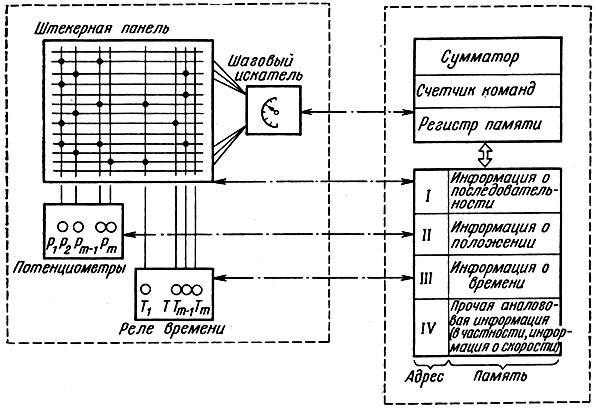
Фиг. 10.25. Сопоставление устройства памяти робота с обучением и соответствующей аппаратуры цифровой вычислительной машины
Аппаратурную часть вычислительной машины можно грубо разделить на блок памяти и блок регистров, в которых обрабатывается накапливаемая в блоке памяти информация. На фиг. 10.25 блок I запоминания информации о последовательности соответствует штекерной панели, которая является главным запоминающим устройством робота с обучением; блок II запоминания информации о положении соответствует группе потенциометров робота с обучением; блок III запоминания информации о времени соответствует группе реле времени. Таким образом, все виды информации заносятся в разные зоны памяти. Кроме того, при управлении с помощью ЭВМ имеется также блок памяти прочей аналоговой инфорхмации, в частности информации о скорости.
Запоминание всех видов информации, представленных в дискретной форме, осуществляется в вычислительной машине одинаково, однако методы обучения информации каждого вида различны. Обучение информации о последовательности (комбинация видов единичных операций на каждом из последовательных шагов и последовательность перехода к следующему шагу) и информации о скорости и др. производится косвенным путем с помощью слов, символов и числовых значений. Обучение же информации о положении, времени и т. д. проще всего осуществляется непосредственным методом. Некоторым данным из такой аналоговой информации в заранее известных случаях .можно обучать методом косвенного обучения, и можно также производить обучение, используя методы косвенного и непосредственного обучения одновременно.
В качестве примера рассмотрим единичную операцию "Переместить руку робота в точку А со скоростью V". Значению координат, соответствующих положению руки в точке А, обучают методом непосредственного обучения. С этой целью вычислительная машина дополнительно оснащается аналого-цифровым преобразователем. Что касается информации о скорости V, то здесь задают числовые значения методом косвенного обучения. Программа, выдаваемая на печать, имеет вид, показанный на фиг. 10.26. "Иди в А, V" - это основная команда, означающая перемещение руки в заданную точку с определенной скоростью, которая вводится в отдельный блок памяти. Команда "Данные... А" является адресной командой для блока памяти II, в который вводится конкретная цифровая информация, соответствующая символу А. "Данные... V" - команда, определяющая конкретное значение скорости (м/с). Обучение конкретной цифровой информации, обозначенной символом A, осуществляют непосредственным методом, перемещая руку в точку А. Значения координат в точке А полученные в цифровой форме с помощью аналого-цифрового преобразователя, вводят в блок памяти II в сооответствии с адресом, заданным командой "Данные... А". Существует также набор других команд, используемых при управлении роботом с помощью вычислительной машины. Удобно, чтобы каждая команда соответствовала отдельной единичной операции.
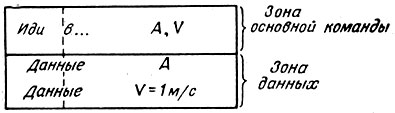
Фиг. 10.26. Структура программы
Примеры команд для управления роботом приведены в табл. 10.9. В большинстве случаев управление кистью осуществляется отдельно по каждой ее степени свободы, а не одновременно по всем степеням.
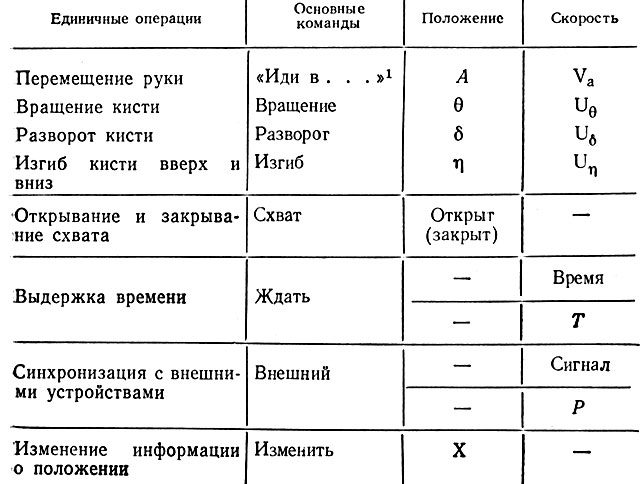
Таблица 10.9. Примеры команд для управления роботом
1 (Команде "Иди в ..." соответствует перемещение между точками по прямой.)
Существуют также команды рефлекторных движений, связанные с перемещением руки относительно препятствий. Здесь они не рассматриваются. Для удобства потребителей основные команды сведены в отдельные подпрограммы.
д) Классификация методов обучения эксплуатируемых в настоящее время роботов. Классификация методов обучения имеющихся на рынке сбыта роботов приведена на фиг. 10.27. Ниже дается расшифровка использованных при этом символов.
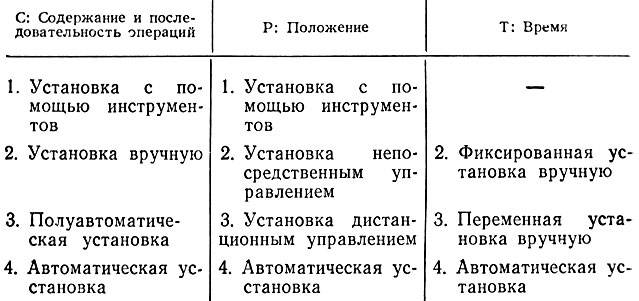
Пояснение к фиг. 10.27
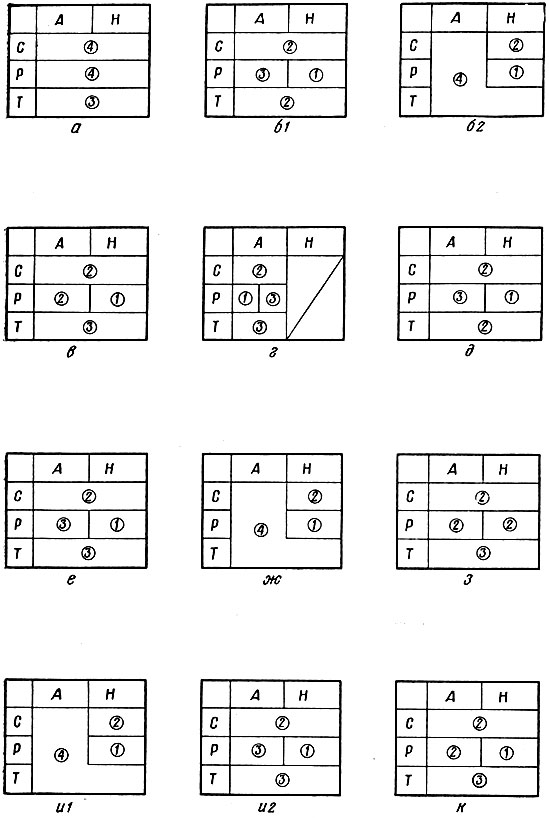
Фиг. 10.27. а - 'Юнимейт' (фирма 'Кавасаки Дзюгокё'); б1 - 'Версатран' (фирма AMF), позиционное управление; б2 - то же, управление по непрерывному пути; в - рука 'Хинами № 25' (фирма 'Хинами Сангё'); г - 'Робот' (фирма "Ямато Пуресу"); д - "Консларм" (фирма "Исикавадзима Харима Дзюкогё'); е - 'Вакумэйто' (фирма 'Морита Тэкко'); ж - 'Промышленный робот" (фирма "Юкю Когё"), з - "Механическая рука" (фирма "Ясукава Дэнки'); и1 - манипуляторы (фирма 'Кавагути Тэкко'), Марк II; и2 - то же, Марк III; к - "Промышленный робот" (фирма "Токе Кэйки Сэйдзосе");
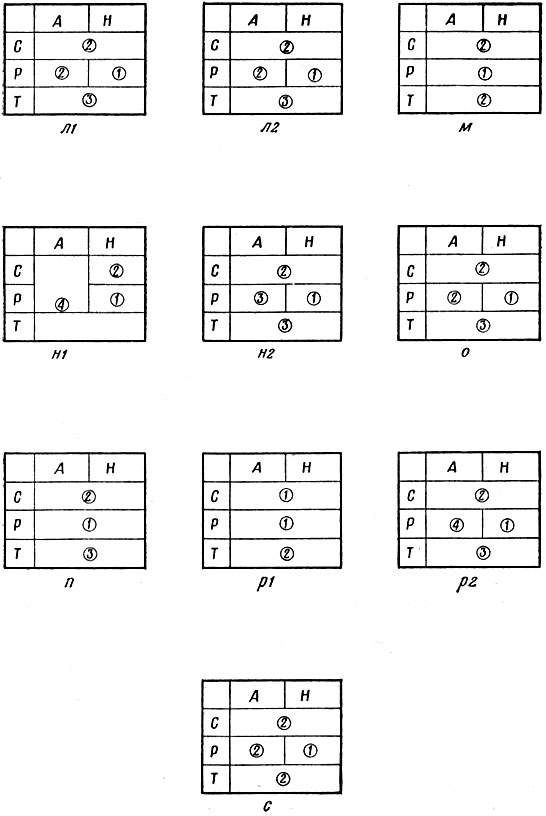
Фиг. 10.27. л1 - 'Манипулятор' (фирма 'Нагоя Кико'); модель А, л2 - то же, модель В; л3 - то же, модель С; м - 'Автоматическая рука' (фирма 'Айда Энджиниринг'); н1 - 'Юнимэн' (фирма 'Фудзикоси') контурное управление понепрерывному пути, н2 - то же, позиционное управление, о - 'Транс' (фирма 'Тосиба Сэйки'); п - 'Арумато' (фирма 'Сева Куацуки'); p1 - 'Промышленный робот' (фирма 'Сан'ё Кико'), упрощенная модель; р2 - то же, расширенная модель; с - 'Хайботто' (фирма 'Ясуи Сангё')
4) Методы воспроизведения.а) Общие сведения. Метод воспроизведения определяет последовательность считывания заложенной в память робота с обучением информации.
Только в роботах с централизованной системой памяти не возникает проблем при воспроизведении, так как в них ввод в устройство памяти и считывание информации осуществляются в определенной последовательности. При системе раздельной памяти, когда все виды информации вводятся в память отдельно, можно, изменяя последовательность воспроизведения, сообщить роботу адаптивные свойства. В этом случае воспроизведение связано с рядом проблем. Если классифицировать методы воспроизведения с точки зрения информации о последовательности, то их можно грубо подразделить на методы, в которых последовательность воспроизведения всегда одинакова (метод воспроизведения с постоянной последовательностью), и методы, когда последовательность воспроизведения можно изменять (метод воспроизведения с переменной последовательностью).
Первый из этих методов применяется в простых роботах с обучением, которые повторяют одинаковые по содержанию операции; этот случай не требует особого рассмотрения.
Второй метод - воспроизведение с переменной последовательностью - является методом, который можно применить в адаптивных роботах с обучением, когда "сам робот в процессе работы может определять физические величины, касающиеся объекта, действий и окружающей среды, оценивать непосредственную ситуацию и осуществлять изменение последовательности воспроизведения, а также комбинации единичных операций". Данный метод воспроизведения с переменной последовательностью в свою очередь можно подразделить на метод переключения программ и метод произвольный выборки. Метод переключения программ - это такой метод, когда имеется несколько видов программ, которые переключаются в соответствии с конкретными условиями эксплуатации робота. Метод этот достаточно прост. В отличие от него при методе произвольной выборки программа составляется автоматически в соответствии с конкретной ситуацией. В этом случае нельзя обойтись без ЭВМ.
Классификация методов воспроизведения приведена в табл. 10.10. В данной главе в п. "б" рассматриваются сенсорные датчики "физических величин, связанных с объектом действий и окружающей средой", а в п. "в" - метод воспроизведения с переменной последовательностью. В п. "г" рассмотрены конкретные роботы, наделенные адаптивными свойствами.
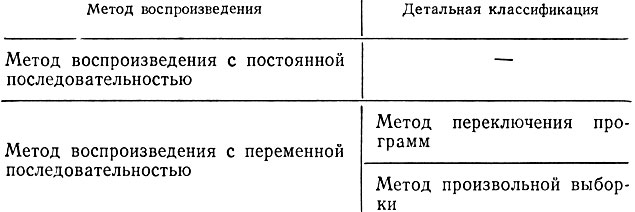
Таблица 10.10. Классификация методов воспроизведения
б) Сенсорные устройства.
1) Осязание. Существуют следующие четыре метода управления, когда используются сигналы тактильных датчиков:
- Управление по сигналу "Включено-выключено". При этом методе осуществляют переключение программ на основании порогового сигнала о соприкосновении с объектом. Сигнал датчика подтверждает, что объект существует, кроме того, определяется его положение относительно схвата. Усилие, прилагаемое к объекту, постоянно.
- Управление схватом по сигналам тактильных датчиков. При этом методе управления осуществляют коррекцию положения схвата и объекта по заранее заложенной в устройство памяти программе, используя непрерывные выходные сигналы или сигналы "Включено- выключено". Подобный метод, например, применяется, когда объекты произвольно расположены в пределах какой-то зоны. При обучении роботу сообщается лишь общая информация о размещении объектов, а регулирование положения и усилия схвата осуществляется при воспроизведении. Таким методом можно поворачивать ручку, открывать дверь.
- Управление по давлению. Используется непрерывный выходной сигнал. Подобным методам можно регулировать усилие захвата объекта, смягчать толчок при столкновении, заставить робот следовать за движущимся объектом. Информация о давлении может быть заранее введена в устройство памяти; в других случаях сигналы давления могут использоваться только при воспроизведении программы.
- Управление по сигналу скольжения. При этом методе фиксируется скольжение объекта при захвате. Управление строится таким образом, чтобы исключить выскальзывание объекта.
Наиболее важным вопросом в области тактильных сенсорных устройств является создание надежных малогабаритных датчиков, пригодных для промышленных роботов. Вопрос этот более важен, чем разработка методов использования самих датчиков. Методы управления с использованием тактильных датчиков и применяемые в настоящее время датчики перечислены в табл. 10.11.
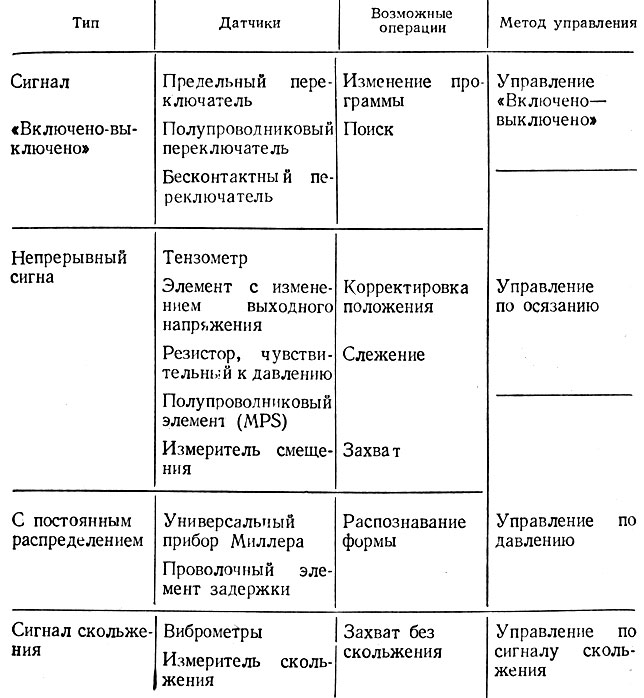
Таблица 10.11.Тактильные устройства
2) Зрение. Особенность зрения состоит в том, что оно позволяет, не соприкасаясь с объектом, установить его состояние. Следует оговорить, что выделение особенностей объекта - это уже интеллектуальная работа, выходящая за пределы функции роботов с обучением. В данном случае в круг функций робота с обучением, наделенного свойствами адаптации, включается распознавание отдельных объектов, например, путем различения их цветовых признаков. В будущем, вероятно, подобно роботам со зрением, появятся автоматы, осуществляющие технический контроль и другие подобные операции.
В качестве датчиков зрения могут быть использованы фотоэлектрические элементы (фототранзисторы, фотоэлементы), телекамеры (видикон) и т. д.
3) Прочие сенсорные устройства. Среди прочих сенсорных устройств можно выделить "органы ; слуха", различающие голос человека и другие звуки, "химические органы чувств", различающие свойства газов и жидкостей, "электрические органы чувств", различающие ток, магнитное поле и т. д., и ряд других.
в) Метод воспроизведения с переменной последовательностью. В общем разделе уже упоминалось, что этот метод можно разделить на метод переключения программ и метод произвольной выборки. В свою очередь метод переключения программ можно подразделить на следующие три метода: метод выбора программы, метод перехода, метод подпрограмм. О методе произвольной выборки будет кратко сказано далее.
1) Метод переключения программ. а) Метод выбора программы. В процессе обучения в устройство памяти вводят несколько программ, а при воспроизведении эти программы переключают с помощью простейших сенсорных устройств. Последовательность выполнения логических операций при методе выбора программы показана на фиг. 10.28. Именно метод выбора программы наиболе часто применяется на практике в роботах с обучением, наделенных свойствами адаптации. Режим выбора программы несложно реализовать и в роботах с постоянной последовательностью воспроизведения и с системой раздельной памяти. Для этого необходимы дополнительный логический блок выбора программы и блок переключения.
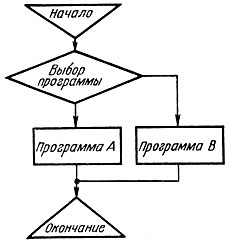
Фиг. 10.28. Последовательность логических операций при методе выбора программы
б) Метод перехода. В процессе воспроизведения повторяющихся операций по сигналам тактильных датчиков в программу добавляют несколько видов единичных операций. Применение такого метода дает возможность частично изменять содержание операций в пределах каждого цикла повторения. Последовательность выполнения логических операций при данном методе показана на фиг. 10.29.
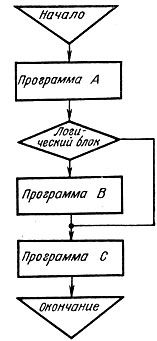
Фиг. 10.29. Последовательность логических операций при методе перехода
в) Метод подпрограмм. Этот метод заключается в том, что ряд единичных операций объединяют и оформляют в виде подпрограмм, а последовательность воспроизведения подпрограмм вводят в память робота. Последовательность логических операций при методе подпрограмм показана на фиг. 10.30. При таком методе требуются два вида устройств памяти: устройство запоминания последовательности внутри подпрограммы и устройство запоминания последовательности подпрограмм. Пример реализации метода подпрограмм показан на фиг. 10.31.
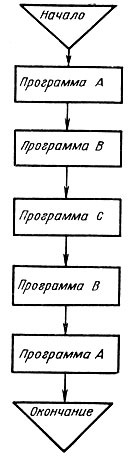
Фиг. 10.30. Последовательность логических операций при методе подпрограмм
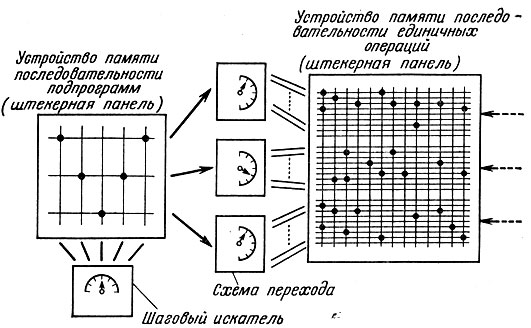
Фиг. 10.31. Пример реализации метода подпрограмм
2) Метод произвольной выборки. Каждой единичной операции присваивается свой адрес. Переключение единичных операций осуществляется произвольно. Для реализации такого метода требуется цифровая вычислительная машина; при попытке использовать устройства памяти, применяемые в простых роботах или роботах с адаптацией, возникают значительные трудности. Помимо информации о последовательности, положении и времени, в память вводятся: информация датчиков осязания и зрения, аналоговая информация о скорости, об усилиях захвата, о давлении при соприкосновении с объектом и т. д.
При методе произвольной выборки имеется возможность запомнить аналоговую информацию различных видов, используя способность цифровой вычислительной машины выполнять весьма сложные операции и применять как линейную, так и круговую интерполяцию при перемещении между двумя точками. Все это позволяет роботу совершать рефлекторные движения и обходить либо удалять препятствия, возникающие при выполнении операций.
г) Примеры практического осуществления.
1) Промышленный робот фирмы "Токё Кэйки". Данный робот распознает габариты и вес объектов. Подъем объектов большого веса робот выполняет при втянутой руке, увеличивая тем самым пределы своей грузоподъемности. При воспроизведении имеется возможность выбора одной из двух программ, что простым образом обеспечивает возможность адаптации робота к окружающей обстановке. Последовательность логических операций данного робота показана на фиг. 10.32.
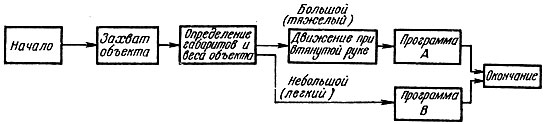
Фиг. 10.32. Последовательность логических операций, выполняемых роботом с адаптацией
2) ROKS (фирма "Кавагути Тэкко"). На схвате могут быть установлены тактильные датчики, в том числе реагирующие на давление, тепловые датчики, аварийные выключатели и т. д.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'