10.5. Интеллектуальные роботы
1) Общие сведения. Интеллектуальные роботы - это роботы, которые могут распознавать объекты и их состояние и на основе такого распознавания автоматически определять действия, которые им следует выполнить. В интеллектуальных роботах функции, обозначаемые словом "интеллект", в настоящее время еще не имеют строгого и однозначного толкования.
Среди роботов с обучением, которые можно применять в промышленности, имеются такие роботы, которым приданы простые функции распознавания, например определение наличия или отсутствия объекта и др. Программа управления такими роботами обеспечивает им некоторые свойства адаптации к окружающей обстановке. При классификации эти роботы можно включить в разряд роботов с обучением, но, с другой стороны, их можно рассматривать и как один из видов интеллектуальных роботов, хотя и с очень низкой степенью интеллекта.
В интеллектуальных роботах, предназначенных для изучения и освоения не известных человеку миров, необходимы максимальная приспособляемость и высокий уровень интеллекта.
Приведенные примеры представляют два крайних случая интеллектуальных роботов. В действительности под интеллектуальным роботом обычно понимают примерно следующее. Это робот, которому человек подает до определенной степени конкретизированные команды, после чего робот сам распознает объект операций, выясняет условия их выполнения и на основе этой информации определяет и реализует методы выполнения операций. В ходе выполнения операций робот следит за изменением состояния объекта и адаптируется к окружающей обстановке.
Как было сказано в п. 10.1 данной главы, при поручении роботу каких-либо задач на стадии обучения нельзя обойтись без какого-то вмешательства человека. Чем меньше команд требуется роботу, т. е. чем проще его обучение и управление, тем более совершенным является робот.
Робот с обучением освобождает человека от ряда ручных операций. Интеллектуальный робот заменяет человека в умственной деятельности. Можно сказать, что чем шире диапазон такой замены, тем выше показатель степени интеллекта у интеллектуального робота. В данном разделе мы попытаемся рассмотреть их систему управления и интеллект ("искусственный интеллект"), сосредоточив внимание на преимуществах интеллектуальных роботов.
2) Управление интеллектуальным роботом. Операции выполняются интеллектуальным роботом в следующей последовательности:
- составляется план операций;
- с учетом распознавания условий работы и состояния объекта определяется порядок действий;
- приводятся в действие исполнительные механизмы робота.
В противоположность интеллектуальным роботам у обычных роботов план операций и порядок действий зависят от волевого решения человека-оператора, а приведение в действие исполнительных механизмов осуществляется автоматически.
Блок-схема системы управления интеллектуального робота показана на фиг. 10.33. Характерная особенность данной системы управления состоит в наличии функции распознавания объекта и его состояния с помощью сенсорных устройств и в определении (на основе этой информации и полученных от оператора команд) подлежащих выполнению действий. Это в значительной мере делает робот универсальным и способным адаптироваться к окружающей обстановке, а также обеспечивает простоту управления роботом.
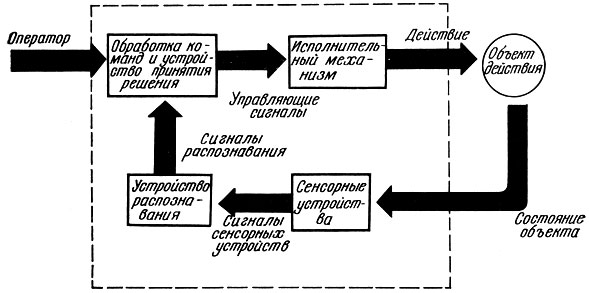
Фиг. 10.33. Блок-схема системы управления интеллектуальным роботом
Ниже перечислены вопросы, требующие к себе внимания, когда речь идет о системе управления интеллектуального робота.
- Управление исполнительными механизмами.
- Распознавание и сенсорные устройства.
- Обработка команд и принятие решения.
- Обмен информацией между человеком и интеллектуальным роботом.
Методы упpaвления исполнительными механизмами интеллектуальных роботов аналогичны методам, используемым в роботах с обучением. По этой причине здесь нет (необходимости повторять сказанное в предыдущее разделе.
3) Распознавание и сенсорные устройства. Интеллектуальный робот должен в значительной мере обладать способностью адаптации к окружающей обстановке. В этом, разумеется, важную роль играют сенсорные устройства, воспринимающие внешнюю информацию.
Области применения интеллектуальных роботов весьма обширны. Они могут использоваться как в промышленности, так и в области научных исследований. В зависимости от целевого назначения роботов требуются самые разнообразные сенсорные устройства. Здесь мы ограничимся рассмотрением сенсорных устройств и системы распознавания образов для роботов производственного назначения, выполняющих главным образом погрузочно-разгрузочные операции.
а) Сенсорные устройства, требующиеся для интеллектуальных роботов производственного назначения. Можно выделить следующие три основных вида сенсорных устройств: 1) устройства зрения; 2) устройства слуха; 3) устройства осязания.
Основные сенсорные устройства, необходимые интеллектуальному роботу, представляют собой как бы три органа чувств. Об особенностях этих органов чувств и их входных элементах см. п. 4б (сенсорные устройства) разд. 10.3.
б) Функция распознавания интеллектуального робота. Сигналы, получаемые с помощью сенсорных устройств, ,как правило, представляют собой информацию, соответствующую какому-то "образу". Исходя "из этой информации, можно выявить особенности объекта и произвести необходимые измерения образа.
В распознавании объектов с помощью устройств зрения и слуха можно различать распознавание самого объекта операции и распознавание сигналов от оператора. Во втором случае речь идет о распознавании сигналов, записанных, например, на бумаге буквами или в виде графика, или о распознавании сигналов, подаваемых голосом. Об этом см. ниже в п. 5 ("Обмен информацией между человеком и интеллектуальным роботом").
1) Устройства зрения. Зрительную информацию об образе можно получить, используя в качестве устройства ввода информации телекамеру. В настоящее время для ввода зрительной информации чаще всего применяют видиконы, но желательно разработать устройства, .которые обладали бы более высокой помехозащищенностью при малых темновых токах. Кроме того, используются также некоторые другие системы. В недалеком будущем, вероятно, появятся устройства, в которых для зрительного ввода будут использоваться лазерные лучи.
Используемая для распознавания информация - это главным образом светотеневая (контрастная) информация, но может использоваться также информация о цвете и информация о положении (по светящимся точкам на изображении).
Распознаваемые объекты - трехмерные предметы. Процесс распознавания идет в следующей (последовательности:
- предварительная обработка (контурное изображение);
- распознавание;
- измерение (необходимых параметров объекта, например его величины, местоположения и т. д.).
В проблеме распознавания существует много вопросов, представляющих большой интерес, например распознавание сложных фигур, распознавание предметов в случае, когда некоторые из них поставлены один на другой, т. д.
Для функционирования интеллектуального робота он должен "понимать" окружающую обстановку. Робот запоминает реальный мир своего окружения в виде некоторой модели, но для оценки окружающей обстановки одного зрения оказывается недостаточно.
2) Устройства слуха. Устройства слуха чаще используются для целей измерения и обнаружения, чем для распознавания образов. Помимо ультразвуковых измерений, касающихся местоположения объектов и их габаритов, устройства слуха используют для распознавания окончания операций и для обнаружения необычных шумов путем улавливания звуков и шумов на рабочем месте с помощью микрофонов.
3) Устройства осязания. В основном они используются для обнаружения местоположения и непосредственных измерений. Однако, помимо этого, тактильную информацию можно использовать для распознавания состояния поверхности предметов и их свойств (вес, эластичность и др.).
4) Обработка команд и принятие решения. Интеллектуальный робот составляет план операций и выполняет работу на основе подаваемых человеком-оператором команд и результатов распознавания. Команды, подаваемые роботу, могут иметь самую различную форму: от простой и конкретной до достаточно абстрактной.
Что касается методов использования результатов распознавания, то они также могут быть весьма различными: от смены программ с помощью простейших датчиков, придающих роботу некоторые свойства адаптации, до автоматически выполняемого эвристического программирования.
а) Классификация по форме команд.
1) Форма последовательных команд применяется при управлении роботом с обучением с помощью ЭВМ. Для интеллектуального робота она непригодна.
2) Форма ориентированных команд. Это система подачи команд на выполнение роботом комплекса единичных операций. Во время исполнения каждой из команд робот сличает свои действия с выходными сигналами устройств распознавания. Исследования в этой области в будущем, вероятно, будут расширяться на основе совершенствования систем диалога с вычислительной машиной и машинного языка.
3) Форма общих команд. По этой системе роботу подают только команду, указывающую в общих чертах его задачу, а порядок выполнения операций робот определяет самостоятельно. Роботу предварительно задают лишь алгоритмы решения вопросов. Подобная система аналогична доказательству теорем с использованием заданных аксиом. Здесь оказывается возможным также автоматическое программирование.
5) Обмен информацией между человеком и интеллектуальным роботом. Для выполнения операций с использованием интеллектуального робота необходимо осуществлять обмен информацией между человеком и роботом. У интеллектуальных роботов, как говорилось ранее, существует большое различие в "уровнях интеллекта". В соответствии с этим существуют средства обмена информацией, соответствующие тому или другому уровню. При обмене информацией между человеком и интел-клектуальным роботом имеется информация, которую человек должен передать роботу, и информация, которую интеллектуальный робот направляет человеку. К первой относятся подаваемые роботу команды и информация обучения. Вторая включает сообщения человеку о ходе выполнения операций, об окончании операций, их результатах и т. д. или обращения к человеку за помощью.
Вопросы, касающиеся методов подачи команд, поступающей от робота информации и т. д., рассмотрены в других разделах книги, здесь же разбираются только средства обмена информацией.
Чтобы хорошо наладить обмен информацией между интеллектуальным роботом и человеком, можно использовать зрительную и слуховую связь. При зрительной связи средством получения интеллектуальным роботом информации от человека может быть распознавание букв и распознавание фигур и чертежей, а средством взаимной передачи информации - сочетание дисплея со световым пером. Преимущество зрительной связи состоит в том, что если человек во время подачи команд или обучения использует буквы, чертежи, фигуры и т. д., то это помогает организации его мышления.
При слуховой связи средством передачи информации является распознавание голоса. Используя технику синтеза речи, можно подавать команды и обучать робот человеческим голосом. Если окажется возможным создать говорящий робот, это значительно улучшит его взаимодействие с человеком. В Стэнфордском университете и других местах уже ведутся исследования в области управления роботом человеческим голосом.
В плане конкретизации перечисленных выше методов связи важное значение имеют разработка аппаратуры для предварительной обработки информации и исследования в области структуры информации и машинных языков.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'