10.6. Управляемые роботы
1) Общие сведения. Управляемые роботы выполняют необходимые операции под управлением оператора. По своему виду и функциям они далеки от идеи подлинного робота. Однако с технической точки зрения у них есть много черт, общих или сходных с другими видами роботов. В данном разделе проводится классификация управляемых роботов главным образом с точки зрения вопросов управления. Разумеется, существует много общего между управлением такими роботами и обучением "роботов с обучением". Можно считать, что при обучении непосредственным методом робот с обучением функционирует как управляемый робот.
2) Классификация управляемых роботов. Области применения управляемых роботов чрезвычайно разнообразны. Поэтому и функции, которыми обладают роботы различного назначения, также очень разнообразны.
Приведем прежде всего классификацию управляемых роботов с точки зрения их функций и уточним общие для них вопросы, а также свойственные каждому виду роботов отличительные черты.
Управляемые роботы можно разделить на следующие четыре вида:
а) Роботы для расширения возможностей человека. Сюда относятся роботы для увеличения мускульной силы человека, для расширения зоны его действий, для увеличения скорости перемещения, для восполнения несовершенных способностей человека. Подобные роботы представляют собой механические силовые манипуляторы, роботы типа "футляра", одеваемые на оператора, механические искусственные конечности и т. д.
Примером механических силовых манипуляторов могут служить ковочные манипуляторы, используемые в кузнечных цехах для манипулирования стальными болванками, инструментальные манипуляторы, применяемые для смены инструмента, и другие [1]. Все они являются передвижными устройствами. Оператор осуществляет управление, находясь на самом манипуляторе. Среди таких манипуляторов есть крупногабаритные устройства, которые могут манипулировать стальными болванками весом до 120 т.
Роботы, одеваемые на оператора, называются экзоскелетонами. Они представляют собой конструкции, показанные на фиг. 10.34 (Кориельская лаборатория аэронавтики [2]) и фиг. 10.35 (Хардимен [3]). Это устройства для выполнения тяжелых операций за счет увеличения мускульного усилия в несколько раз или даже в несколько десятков раз.

Фиг. 10.34
Фиг. 10.35
Механические протезы предназначены для компенсации двигательных функций у инвалидов с пораженными или ампутированными (конечностями и бывают различными в зависимости от степени увечья. Много различий у них и в системах управления, которые зависят от способа подачи управляющих сигналов.
В роботах, предназначенных для расширениявозможностей человека, оператор имеет возможность наблюдать невооруженным глазом за ходом операций. Отсутствие необходимости в специальных устройствах наблюдения является их существенным преимуществам.
б) Роботы для выполнения операций на некотором расстоянии от оператора. Это роботы, которые выполняют операции в условиях, в которых человек не может находиться. Например, при выполнении работ, связанных с радиоактивными веществами и рентгеновскими лучами, вакуумом, ядовитыми газами, при подводных работах и т. д. В подобных случаях, "как правило, бывает Необходимо отделить оператора перегородкой или какфм-то другим способом от того места, где находятся исполнительные механизмы. В большинстве случаев работу механизмов можно наблюдать непосредственно через перегородку, но это не всегда возможно. В таких случаях применяют зеркальные отражатели, перископы и т. д. В случае необходимости используют также промышленное телевидение.
в) Роботы для опасных работ. Это роботы, предназначенные для тех случаев, когда само место работ связано с опасностью и, кроме того, требуется расширить возможности, которыми обладает оператор, например, в отношении величины перемещения.
В судостроении, при сооружении стальных башен, при строительстве зданий и т. д., а также при работах по очистке и уборке человек сам не всегда имеет возможность подниматься на большую высоту, вынужден пользоваться лесами и другой неудобной вспомогательной оснасткой. Все это связано с опасностью для человека Функции регулирования уличного движения также связаны с опасностью столкновения с транспортом. Устройствами, выполняющими подобные операции, и являются роботы для опасных работ.
Оператор в таких случаях обычно находится на некотором расстоянии от самого робота. Поэтому в большинстве случаев требуются какие-то устройства наблюдения, например телескопы, промышленное телевидение.
г) Роботы для освоения глубин океана, других планет и т. п. Это роботы, "которые применяют в тех случаях когда расстояние между роботом и оператором очень велико и взаимный обмен информацией между ними затруднен. Сюда относятся, например, роботы для исследования поверхности Луны и других планет, роботы для работы в космосе, для океанографических исследований и т. д. В таких роботах не всегда в должной мере обеспечен обмен информацией между оператором и самим роботом. Поэтому нужные операции приходится производить только с помощью общих управляющих "команд, а сам робот должен обладать некоторыми свойствами адаптации. В силу этого роботы с такими функциями можно считать близкими к интеллектуальным роботам.
Исключая такие роботы из категории рассмотренных выше управляемых роботов, можно подтвердить, йто управляемые роботы выполняют те же действия, что и роботы с обучением при непосредственном методе их обучения.
3) Системы управления управляемых роботов. Как показано на фиг. 10.36, системы управления можно разделить на четыре вида:
- с разомкнутым контуром;
- сервосистемы;
- сенсорные;
- адаптивные.
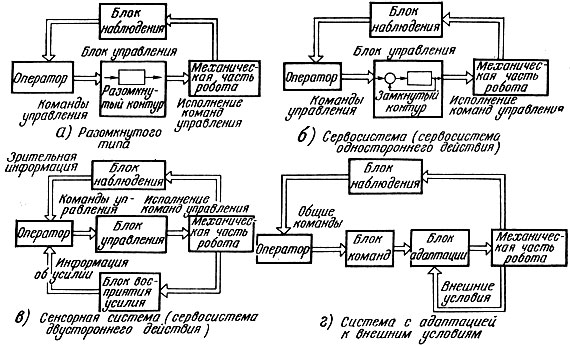
Фиг. 10.36. Классификация систем управления
Система с разомкнутым контуром. Подобная система (фиг. 10.36, а) отличается тем, что часть ее, заключенная между командами управления и их исполнением, разомкнута. По этой причине исполнение может существенно отличаться от самих команд. Для управления часто используются гидравлические клапаны и кнопочные элементы. Оснащение робота блоком наблюдения за ходом операций оказывается недостаточным, требуется еще определенная квалификация оператора.
Системы с разомкнутым контуром отличаются простотой, однако они непригодны для одновременного управления по многим степеням свободы. Такие системы часто применяются в машинах большой мощности, например в силовых манипуляторах, экскаваторах и т. д., в тех случаях, когда не нужна особая точность, а также при небольшом количестве степеней свободы.
Сервосистема (сервосистема одностороннего действия). Подобная система (фиг. 10.36, б) отличается тем, что между командами управления и их исполнением существует обратная связь. Команды управления исполняются с высокой точностью. По этой причине нет столь большой необходимости в зрительной информации, как при использовании системы с разомкнутым контуром, т. е. возможно управление и в тех случаях, когда зрительная информация недоступна. Возможно также одновременное управление по сравнительно многим степеням свободы.
Сенсорная система (сервосистема двустороннего действия). Это такая система (с разомкнутым или замкнутым контуром управления, фиг. 10.36, в), в которой используется обратная связь по усилию. Таким образом, оператор, помимо зрительной, располагает также информацией об усилии. При использовании системы с замкнутым контуром управления (т. е. сервосистемы) становится возможным одновременно управлять по многим степеням свободы. Имеется также возможность выполнять "операции на ощупь", т. е. такие операции, где требуются особенно точные движения. Сенсорные системы используются в экзоскелетонах и роботах, выполняющих операции на некотором расстоянии от оператора, т. е. там, где робот должен обладать повышенными техническими данными.
Адаптивная система. Это система (фиг. 10.36, г), в которой оператор подробно не указывает роботу его действия, а ограничивается только общими командами. Робот самостоятельно приспосабливается к окружающим условиям, используя результаты распознавания своих действий. Адаптивные системы необходимы в роботах, предназначенных для освоения глубин океана, других планет и т. д. Они сходны с системами управления интеллектуальных роботов.
В рассмотренных системах управления можно выделить ряд блоков (блок управления, блок восприятия усилия, блок наблюдения, блок адаптации), которые входят либо во все системы, либо в некоторые из них.
4) Блок управления. Блок управления может быть выполнен в виде системы с разомкнутым контуром или в виде сервосистемы, т. е. системы с замкнутым контуром. Точность управления роботом выше при использовании системы с замкнутым контурам. На точность управления влияют изменение нагрузки и ряд других факторов.
Существуют три метода управления: метод регулирования положения, метод регулирования скорости и метод регулирования усилия.
а) Метод регулирования положения. Данный метод можно назвать также методом копирования. Оператор указывает изменение положения объекта, заставляя робот с помощью сервосистемы следовать командам управления. Точность повторения команд управления высокая. Управление не вызывает трудностей.
Метод регулирования положения эффективен в случае одновременного управления по многим степеням свободы, что имеет место в экзоокелетонах, в роботах, требующих выполнения точных движений, например при манипулировании радиоактивными веществами на некотором расстоянии от оператора, и т. д.
б) Метод регулирования скорости. Оператор управляет скоростью манипулирования объектом. Могут быть использованы системы с разомкнутым контуром и сервосистемы (следящая система по скорости). При таком методе управления даже в тех случаях, когда зона перемещения объекта, а следовательно, и самого робота велика, команды управления изменяются в ограниченном диапазоне. Метод регулирования скорости и рассмотренный ниже метод регулирования усилия нашли преимущественное распространение в управлении перемещением роботов. Метод регулирования скорости используют для управления крупногабаритными манипуляторами, где требуются значительные перемещения при достаточно высокой точности.
Управление регулированием скорости не всегда просто осуществить, поскольку управляющие команды не совпадают по форме с перемещениями объекта манипулирования. В связи с этим необходима высокая квалификация оператора. Одновременно бывает возможным управлять не более чем по двум-трем степеням свободы.
В зависимости от формы команд управления метод регулирования скорости в свою очередь может быть разделен на три метода: метод двухуровневого регулирования, метод многоступенчатого регулирования и метод плавного (бесступенчатого) регулирования.
При двухуровневом регулировании подаются только команды прямого хода, обратного хода и останова. На фиг. 10.37 показана зависимость между командами управления, скоростью и положением объекта манипулирования. При двухуровневом регулировании схема управления проста, однако с повышением скорости исполнительных механизмов точность останова падает. Поэтому при необходимости точного останова приходится работать на низких скоростях, что является недостатком двухуровневого регулирования.
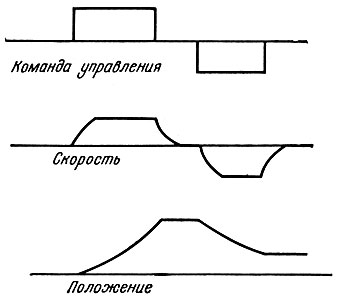
Фиг. 10.37. Зависимость между командами управления и перемещением робота при регулировании скорости
Двухуровневое регулирование применяют в роботах, выпускаемых фирмой "General Mills", - модель 300 [2] и модель 13 000 [2], фирмой "Programmed and Remote Systems" и др.
При многоступенчатом регулировании скорости точность останова исполнительных механизмов робота по сравнению с двухуровневым регулированием повышается. Этот метод часто используют для управления перемещением. Например, в роботе USAF (1963) метод многоступенчатого регулирования скорости используется для управления рукой робота.
Плавное (бесступенчатое) регулирование скорости легко осуществить в гидро- и пневмосистемах. Используя следящую систему по скорости, можно выполнять очень точные движения.
в) Метод регулирования усилия. Величина усилия, приложенного к конструкции робота при его перемещении к объекту, определяется командой управления. В качестве примера можно указать на управление ускорением или торможением приводного двигателя как источника механической энергии.
На фиг. 10.38 показана зависимость между командами управления и перемещением робота при регулировании усилия. Метод регулирования усилия имеет ограниченное применение и используется в основном лишь для управления перемещением; для управления погрузочно-разгрузочными операциями он обычно не применяется.
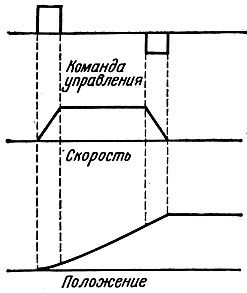
Фиг. 10.38. Зависимость между командами управления и перемещением робота при регулировании усилия
5) Блок восприятия усилия. Блок восприятия усилия обеспечивает оператору возможность полностью или частично ощущать противодействие со стороны объекта манипулирования. С помощью такого блока оператор может выполнять точные движения, мгновенно реагируя на изменения усилия.
Сервосистема, замкнутая по положению, к которой добавлен блок (восприятия усилия, представляет собой следящую систему двустороннего действия. Добавлением такого же блока можно повысить уровень управления и в 'следящей системе, замкнутой ш скорости.
Обычно при манипулировании объектом положение губок схвата робота различно до и после соприкосновения с объектом. До момента соприкосновения противодействие объекта, естественно, отсутствует и достаточно бывает лишь регулирования положения и скорости схвата. Однако после соприкосновения бывает необходимо прикладывать к объекту определенное усилие. Эта задача и решается с помощью блока восприятия усилия.
Как правило, соотношение между усилием, воспринимаемым оператором, и фактическим усилием находится в диапазоне 1-1/10. У манипулятора "Хэндимен" [2], изготовленного фирмой "Дженерал электрик", возможны четыре значения соотношения усилий: 0; 1/10; 1/5; 1/3; у робота ANL (1958) соотношение усилий лежит в диапазоне 1/3-1.
6) Блок наблюдения. При близком расстоянии оператора от объекта манипулирования возможно непосредственное наблюдение за объектом, поэтому здесь нет необходимости в специальном устройстве наблюдения. Разумеется, оно не требуется и, например, в экзоскеле-тонах.
Если оператор и объект управления отделены один от другого, можно использовать зеркальные отражатели и перископы или промышленное телевидение. В зависимости от обстоятельств бывает удобным следить за звуком с помощью микрофонов и громкоговорителей (манипулятор "Хэндимен").
При визуальном наблюдении объем информации очень велик, поэтому полный обмен информацией между оператором и роботом, когда они находятся на большом расстоянии друг от друга, затруднителен. В таких случаях недостаток информации должен быть восполнен искусством самого оператора.
7) Блок адаптации. Придание роботу свойств адаптации означает превращение его в интеллектуальный робот. Здесь мы этот вопрос не рассматриваем, так как об этом уже говорилось в разделах о методах воспроизведения в роботах с обучением "и об интеллектуальных роботах.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'