Калининградский электронный робот
Робот, созданный в радиоконструкторском кружке Калининградской областной станции юных техников, движется вперед и назад, поочередно перемещая ноги и взмахивая руками, поворачивает голову налево и направо, как бы осматриваясь вокруг, демонстрирует на груди короткометражный кинофильм, снятый на 8-миллиметровую пленку, воспроизводит речь и музыку, записанные на ферромагнитной ленте, и даже "отвечает на вопросы". Кроме того, робот реагирует на свет: движется вперед и назад при освещении соответствующих фотодатчиков, останавливается, когда голосом подают команду "Стой", и снова продолжает двигаться при команде "Иди".
Все эти действия робот выполняет с помощью семикомандной аппаратуры радиоуправления, маломощной связной УКВ радиостанции типа 24Р1, фотореле, звукового реле, магнитофона, кинопроектора, электродвигателей и других устройств и механизмов, которыми он оснащен.
Взаимодействие узлов и механизмов робота показано на электрической функциональной схеме (рис. 134), размещение узлов и механизмов в роботе на рис. 135.
Сигналы команд, подаваемые роботу оператором, транслируются с помощью вынесенного УКВ передатчика, принимаются и усиливаются приемником, находящимся внутри автомата, и после преобразования поступают на дешифратор. Всего команд семь - по числу видов выполняемых роботом операций. Рассмотрим каждую из них отдельно.
При подаче команды "движение вперед" срабатывает реле Р7 дешифратора и через его замкнувшиеся контакты Р7 на обмотку реле Р8 и Р9 подается напряжение +24 В от батарей Б1 и Б2. Контакты Р8 замыкаются, и ток через нормально замкнутые контакты Р11/1 поступает на лампочки Л1 ("глаз" зеленого цвета) и электромагниты ЭМ1 и ЭМ2 храпового устройства хода вперед. Одновременно напряжение +24 В через контакты P8/2 поступает на обмотку реле Р13 (контактор К-50-Д), которое срабатывает и контактами Р13/1 включает питание электродвигателя движения ног ЭДн (типа 2ПП-40). Робот начинает двигаться вперед. По этой же команде срабатывает и реле Р9. При этом его контакты размыкаются, исключая тем самым возможность включения электромагнитов ЭМЗ и ЭМ4 на случай срабатывания команды "Движение назад".
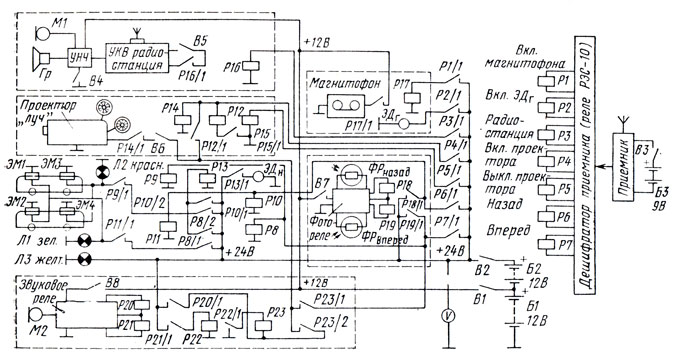
Рис. 134. Электрическая схема калининградского робота
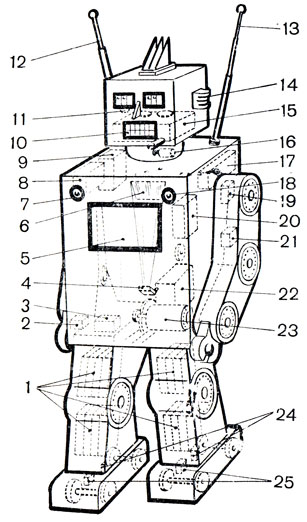
Рис. 135. Размещение узлов и механизмов в калининградском роботе: 1 - аккумуляторные батареи; 2 - фотореле; 3 - блок реле движения; 4 - призма; 5 - экран; 6 - зеркало; 7 - фоторезистор заднего хода; 8 - УНЧ радиостанции; 9 - УКВ радиостанции; 10 - громкоговоритель; 11 - микрофон радиостанции; 12 - антенна УКВ радиостанции; 13 - антенна приемника- 14-микрофон звукового реле; 15 - магнитофон; 16 - электродвигатель с редуктором поворота головы; 17 - приемник; 18 - фоторезистор переднего хода; 19 - питание приемника; 20 - звуковое реле; 21 - блок реле проектора; 22- проектор 'Луч'; 23 - электродвигатель движения ног; 24 - электромагниты заднего хода; 25 - электромагниты переднего хода
При подаче команды "Движение назад" система работает, как и при команде "Движение вперед", с той лишь разницей, что в этом случае срабатывают соответственно реле Р6, Р10 и Р11, электромагниты ЭМ3 и ЭМ4 заднего хода и загораются лампочки Л2 - ("глаз" красного цвета).
По команде "Поворот головы" включается реле Р2 и через его контакты Р2/1 на электродвигатель ЭДГ этого механизма подается питание - голова поворачивается налево и направо.
Когда подается команда "Включение проектора", замыкаются контакты Р4/1 и реле Р4, срабатывает реле Р12, которое при этом самоблокируется контактами Р12/1, включается Р14 (контактор К50-Д) и через его контакты Р14/1 осуществляется включение питания электродвигателя кинопроектора "Луч". Чтобы выключить его, нужно подать команду "Выключение проектора". В этом случае напряжение +24 В через контакты Р5/1 прикладывается к обмотке Р15, контакты которого разрывают цепь питания обмотки реле Р12. При этом обмотка контактора Р14 обесточивается и электродвигатель проектора останавливается.
Аналогично включается магнитофон. По команде оператора срабатывает реле Р1 дешифратора приемника, а через его контакты Р1/1 - реле Р17, включающее питание магнитофона. Магнитофон должен быть включен предварительно на воспроизведение. На магнитофонной ленте можно записать звуковое сопровождение кинофильма, краткие "речи" и "приветствия" робота.
Робот "слышит" своих собеседников через микрофон Ml, с которого сигнал поступает на УНЧ и затем к УКВ радиостанции, включенной на передачу. Аналогичная станция, включенная на прием, находится у оператора. Чтобы ответить на вопросы, задаваемые роботу, оператор переключает свою станцию на передачу и при помощи передатчика радиоуправления переключает радиостанцию робота на прием. При этом поданный сигнал заставит сработать реле Р3 дешифратора, а оно, в свою очередь, реле Р16, переводящее радиостанцию робота на прием - голос оператора будет слышен в громкоговорителе (Гр). Так осуществляется связь робот - оператор - робот.
Помимо команд, подаваемых по радио, робот подчиняется световым сигналам движения вперед и назад, для чего у него в плечах, имеются фоторезисторы (ФРвперед и ФРназад ), фотореле с исполнительными электромагнитными реле Р18 и Р19 на выходе. А так как контакты Р18/1 и Р19/1 подключены параллельно контактам Р6/1 и Р7/1 реле дешифратора приемника, робот при освещении фоторезисторов движется так же, как при подаче команд "Движение вперед" и "Движение назад" по радио.
В общую систему управления движением робота подключаются и исполнительные реле Р22 и Р23 звукового реле. Если через М2 подать команду "Иди", то сработает реле Р20, через его контакты Р20/1 на обмотку реле Р23 будет подано напряжение +24 В, при этом реле срабатывает и самоблокируется контактами Р23/2. Одновременно через контакты Р23/1 напряжение +24 В будет подано на реле Р8, Р9 и робот пойдет вперед. Чтобы его остановить, надо подать команду "Стой". Теперь сработает реле Р21, его контакты Р21/1 замкнут цепь питания реле Р22, которое при этом срабатывает, а его контакты Р22/1, размыкаясь, обесточат обмотку реле Р23 - система приходит в исходное состояние.
Общее представление о конструкции робота дает рис. 135. Его основные узлы: голова с механизмом поворота, туловище с руками и ногами, подошвы ног и кулисный механизм с электродвигателем, приводящий в движение ноги и руки робота. Каркасы головы, туловища, рук и ног собраны из отрезков уголкового дюралюминия, которые затем обшиты листовым дюралюминием. Общая высота модели около 175 см.
Голова представляет собой правильный куб со сторонами 300 мм. На лицевой стороне укреплены глаза - прямоугольные жестяные коробки, разделенные на три отсека перегородками; в отсеки вмонтированы лампочки накаливания СМ-31 24 В/0,1 А. Баллоны лампочек окрашены в красный, зеленый и желтый цвета. Рот имитирует декоративная решетка, прикрывающая отверстие громкоговорителя типа 1ГД-28 усилителя связной УКВ радиостанции 24Р1. Уши - микрофоны МД-47 УКВ радиостанции и звукового реле. Внутри каркаса головы находится магнитофон "Комета-206". Вращается голова с помощью электродвигателя с редуктором от стеклоочистителя, применяемого в трамваях. Электродвигатель с редуктором укреплен снизу верхнего листа туловища. Сочленение осп редуктора с шайбой редуктора, установленной в голове робота, осуществлено при помощи шпонки.
Туловище имеет форму параллелепипеда размером 700X500X Х450 мм. Изнутри к нижней части переднего листа туловища приклепана дюралюминиевая планка толщиной 5 мм, на которой укреплен электродвигатель типа 2ПП-40 движения ног и рук, а также верхние стойки штанг ног. В нижней части туловища к боковым листам приклепаны накладки из дюралюминия, служащие для придания жесткости конструкции и крепления вкладышей с впрессованными в них шариковыми подшипниками для верхних осей ног робота. К этим же листам, но в верхней части туловища приклепаны отрезки уголкового дюралюминия для втулок с шариковыми подшипниками осей рук.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'