3.2. Промышленные роботы в кожевенном производстве
В кожевенном производстве работает большое количество высокопроизводительных машин и агрегатов проходного типа, т. е. оборудования, производящего обработку кожевенного сырья при прохождении через него (например, мездрение кож - снятие с кожи нижнего слоя с остатками жира и мяса, сушка и разглаживание кож, измерение площади обработанных кож). Это создает условия для широкого внедрения несложных и недорогих автоматических манипуляторов, выполняющих простые перемещения кож от одной кожевенной отделочной машины к другой или при загрузке кожевенного сырья в оборудование. Причем если в машиностроении от роботов требуется точность позиционирования в несколько сотых или десятых долей миллиметра, то в кожевенной промышленности для автоматических манипуляторов достаточной является точность позиционирования ±10 мм.
Программное управление такими роботами несложно. Цикловое программное управление решает весь круг задач. Над проблемой широкого использования робототехники в кожевенной промышленности наряду с советскими научно-исследовательскими и проектно- конструкторскими организациями работают фирмы и предприятия ФРГ, Италии, Франции, ЧССР и др. Широкому использованию автоматических манипуляторов с программным управлением для автоматизации кожевенного производства способствует и тот факт, что труд рабочих-кожевников характеризуется монотонностью и наличием тяжелых ручных операций при повышенной влажности и температуре, испарениях химических растворов при обработке кож.
Несмотря на то, что роботы с цикловым программным управлением при обслуживании проходного кожевенного оборудования предназначаются для выполнения простых операций типа "взять" и "положить", при проектировании таких роботов возникают определенные технические трудности, вызванные особенностями кожевенного сырья: различной конфигурацией и площадью кож, их толщиной, массой, плотностью и т. д.
В процессе производства кожи перемещаются из горизонтального положения в вертикальное, из вертикального - в горизонтальное, переворачиваются на 180° в горизонтальной и вертикальной плоскости. Разгрузка и выгрузка оборудования производятся с использованием накопительных площадок и тележек. При осмотре и сортировке кож их перегадывают в ориентированном положении с одной накопительной площадки (или тележки) на другую.
В зависимости от вида перемещения кож используют два основных класса автоматических манипуляторов - специализированные и универсальные.
Первые выполняют только одну операцию по загрузке и выгрузке кож или по их ориентации. Они предназначены для работы с кожами одного вида: мягкими - для верха обуви или жесткими - для низа обуви. Эти автоматические манипуляторы конструктивно состоят из исполнительного механизма (рука, зажим, схват), механизма привода и блока управления. Они работают по жесткой цикловой программе и чаще всего являются однопрограммными.
Универсальные автоматические манипуляторы обладают большим числом степеней подвижности и выполняют операции по загрузке, выгрузке и ориентации всех видов кож с укладыванием их на тележки или накопительные площадки. Роботы этого класса имеют, как правило, две жестко соединенные друг с другом руки с соответствующими схватами. Наличие двух рук позволяет одновременно выполнять две операции: одной рукой укладывать подлежащую обработке кожу в зону обработки агрегата, а второй брать с накопительной площадки верхнюю кожу для подготовки ее к загрузке в оборудование, или же одной рукой снимать обработанную кожу с транспортирующего устройства, а второй - укладывать на накопительную тележку предыдущую снятую кожу.
Промышленные роботы, используемые в кожевенном производстве, имеют два основных типа схватов - клещевые и вакуумные.
Клещевые схваты применяются, как правило, в специализированных роботах для захватывания и укладывания мягких и жестких кож, а вакуумные схваты - в универсальных роботах для подачи, приемки и укладки всех видов кож.
Конструкцию и принцип действия некоторых промышленных роботов, используемых в кожевенной промышленности, рассмотрим на конкретных примерах.
Специализированный автоматический манипулятор типа УК (укладчик кож) предназначен для захвата жестких кож массой до 12 кг из машины 1 (рис. 19) проходного типа (например, подошвенного катка) и поштучного укладывания их на транспортную тележку 11. Две пары схватов 4 и 9 манипулятора закреплены на транспортирующем устройстве 8 цепного типа с приводом от электродвигателя через ведущую шестерню 10. Кожа 2 после обработки в проходной машине проходит ролик 3, попадает на стол 13 и заходит в раскрытый схват 4 манипулятора, находящегося в этот момент на исходной позиции в вырезе стола 13. Фотодатчик, состоящий из светодиода 5 и фотодиода 12, при попадании кожи в схват 4 срабатывает и выдает сигнал на включение электропривода транспортирующего устройства 8. Перед началом движения транспортирующего устройства схваты закрываются, зажимают в двух точках край кожи и перемещают ее к тележке 11. Вторая пара схватов 9 движется в это время к исходной позиции в вырезе стола 13. Пара схватов 4 при попадании на ведущую шестерню 10 автоматически раскрывается, и кожа укладывается на тележку 11.
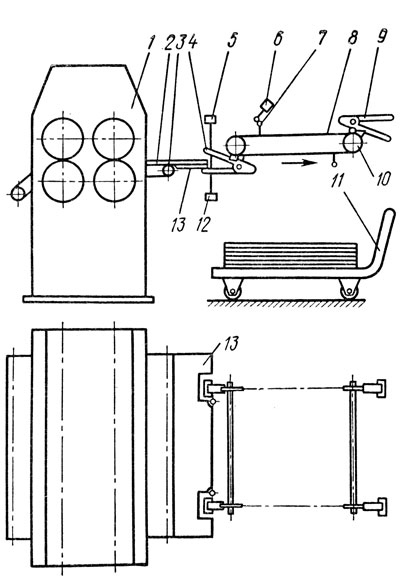
Рис. 19. Схема специализированного автоматического манипулятора типа УК
При выходе второй пары схватов 9 на исходную позицию кулачок 7, расположенный на транспортирующем устройстве, нажимает на путевой выключатель 6, который выдает сигнал на выключение электродвигателя транспортирующего устройства. Манипулятор останавливается в исходном положении и ожидает захода следующей кожи в раскрытые схваты 9 для ее последующей транспортировки. Автоматическое управление манипулятором осуществляется цикловой системой программного управления. Производительность манипулятора - 450 кож в час, укладывание их на тележку выполняется с точностью ±20 мм.
Универсальный промышленный робот типа МВ-1 предназначен для приема, подачи и укладывания как мягких, так и жестких кож на загрузочное транспортирующее устройство машины проходного типа. Манипулятор этого робота имеет две руки 6 (рис. 20) и 8 с вакуумными схватами 7 и 9. Обе руки расположены на поворотной стойке 12 и имеют возможность поворота вокруг осей 4 и 11 при срабатывании пневмоцилиндра 13, шток которого соединен с рейкой 3у взаимодействующей с зубчатыми шестернями 5 и 10, жестко соединенными с руками манипулятора. Манипулятор может поворачиваться также вокруг вертикальной оси вращаясь от реечного штока 18 пневмоцилиндра 19, взаимодействующего с шестерней 17.
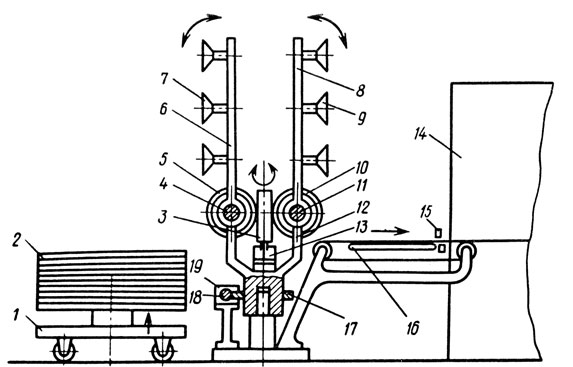
Рис. 20. Схема универсального промышленного робота МВ-1
Манипулятор выполняет операции захвата кож 2 с транспортной тележки 1, переноса их и укладывания на ленточное транспортирующее устройство 16, оснащенное фотодатчиком 15. Верхняя площадка тележки 1 может подниматься или опускаться при съеме или накоплении кож.
При этом верхняя кожа постоянно находится на одном и том же уровне над полом.
Промышленный робот МВ-1 работает следующим образом. В исходном положении руки 6 и 8 стоят вертикально. Рабочий устанавливает тележку 1 с кожами на рабочую позицию и включает привод манипулятора. Пневмоцилиндр 13 срабатывает, рейка 3 движется вверх, шестерни 5 и 10 начинают вращаться и поворачивать руки 6 и 8 в горизонтальное положение. Как только рука 6 примет горизонтальное положение и коснется кожи, в вакуумных схватах 7 начинается отсос воздуха и схваты надежно захватывают кожу. Рука 8, придя в горизонтальное положение и соприкоснувшись с лентами транспортирующего устройства 16, останется в этом положении, и вакуума в схватах 9 создаваться не будет. После захвата кожи рукой 6 пневмоцилиндр 13 переключится, рейка 3 пойдет вниз и, вращая шестерни 5 и 10, вернет руки 6 и 8 в вертикальное положение. После этого включается пневмоцилиндр 19 и путем воздействия реечного штока 18 на шестерню 17 поворачивает стойку 12 на 180°. При этом руки 6 и 8 меняются своими первоначальными позициями. Затем включается пневмоцилиндр 13 и поворачивает руки 6 и 8 в горизонтальное положение. При соприкосновении кожи, удерживаемой рукой 6, с ленточным транспортирующим устройством 16 вакуум в пневматических схватах 7 больше не создается, кожа опускается и ложится на конвейер. В это время в схватах 9 руки 8 при контакте с кожей, лежащей на тележке, создается вакуум, и они прочно захватывают кожу. Затем обе руки манипулятора возвращаются в вертикальное положение, пневмоцилиндр 19 поворачивает их вновь на 180° (в исходное положение) и они остаются неподвижными до тех пор, пока задний край кожи, уложенной перед этим на транспортирующее устройство 16 и перемещаемой в зону обработки машины 14, не пройдет под фотодатчиком 15.
После этого обе руки начинают поворачиваться в горизонтальное положение и весь цикл работы манипулятора повторяется.
Последовательность автоматического срабатывания пневмоцилиндров 13 и 19, создание вакуума в схватах 7 и 9, отпускание схватами кожи задаются и контролируются цикловой системой управления.
Промышленный робот МВ-1 имеет грузоподъемность 12 кг и загружает в оборудование проходного типа до 450 кож в час.
В результате анализа тяжелых ручных операций, существующих в кожевенном производстве, установлено, что объективные причины, препятствующие широкому внедрению в производство промышленных роботов, отсутствуют. Поэтому в последние годы робототехника стала применяться на Киевском производственном кожевенном объединении им. М. В. Фрунзе, на Московском и Осташковском кожевенных заводах, на Бердичевском производственном кожевенном объединении. Большие работы по разработке специализированных и универсальных промышленных роботов и созданию на их базе роботизированного кожевенного оборудования проводятся в Украинском научно-исследовательском институте кожевенно-обувной промышленности, в Ленинградском специальном конструкторском бюро по проектированию кожевенно-обувных машин, во Всесоюзном научно-исследовательском институте легкого и текстильного машиностроения и др.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'