Разработка последующих поколений промышленных роботов и краткое представление о робототехнической системе
Потребность в промышленных роботах
На рис. 7.3 представлены некоторые результаты обследования спроса на машины и механизмы с высоким уровнем автоматизации (на интеллектуальные роботы), проведенного Японской ассоциацией по промышленным роботам. Как следует из рисунка, максимальный спрос приходится на роботы для экстремальных сред. Сравнительно хорошо автоматизированы вспомогательные, ремонтно-профилактические и контрольные службы. Большие надежды возлагаются на роботы в новых областях их применения.
Рис. 7.3. Распределение потребности в системах автоматизации производства с использованием роботов (на примере распределения 637 систем)
До сих пор промышленные роботы использовались, как правило, в обрабатывающей промышленности, в первую очередь в автомобильной и электротехнической. В последнее время резко повысился спрос на автоматизацию и безлюдную технологию (с помощью роботов) на самых разнообразных производственных предприятиях. Даже в таких сферах производственной деятельности, как сельское хозяйство, инженерно-строительные работы, угледобывающая, рудодобывающая, резиновая и металлургическая промышленности, где автоматизация ранее считалась невозможной или неоправданно сложной, применение робототехники позволяет ускорить процесс автоматизации производства.
Разумеется, непрерывно возрастает потребность в роботах при выполнении работ в экстремальных средах, пребывание в которых для человека либо невозможно, либо опасно (около атомных реакторов, в космическом пространстве, в подводной среде и т. д.).
Независимо от того, для каких целей и сфер производства предназначены роботы, всех их объединяет наличие трех структурных компонентов: средств передвижения, средств выполнения рабочих операций, средств восприятия внешней среды и своего состояния. Для обеспечения этих средств необходимы (рис. 7.4): корпус с источником энергии, средства обработки информации, средства связи человека с роботом.
Рис. 7.4. Базовые структурные элементы автономного промышленного робота. 1 - средства передвижения; 2 - средства выполнения рабочих операций; 3 - средства восприятия внешней среды и своего состояния; 4 - корпус робота; 5 - средства обработки информации; 6 - средства связи человека с роботом
Перечисленные шесть основных компонентов называют базовыми структурными элементами робота. Пока не удастся обеспечить достаточно эффективные показатели каждого из них, создание пригодного для эксплуатации промышленного робота любого типа невозможно. Таким образом, необходимо сосредоточить все усилия (интеллектуальные и материальные) на проведении научно-исследовательских разработок базовых структурных элементов робота.
Робот, содержащий все базовые структурные элементы, называют структурным (или системным) роботом*.
* (Понятие структурный робот было сформулировано одновременно Иноуэ из Государственного университета (Токио" Япония), из Научно-исследовательского института "Дэнси гидзюцу сого кэнкюсё" (Токио, Япония) и автором при обсуждении основных принципов разработки робота будущего.)
Понятие "автономный робот"
Для реализации основных принципов создания такого системного робота будем исходить из требования, что робот в процессе работы должен иметь возможность перемещения (линейного и углового); иными словами, это должен быть интеллектуальный, мобильный промышленный робот. Для обеспечения возможности выполнения работы в процессе перемещения такого робота необходимо исключить кабельные линии информационного обмена с постом управления и энергопитания робота, т. е. необходима его автономность. Такой автономный мобильный интеллектуальный промышленный робот сокращенно будем называть автономным промышленным роботом (рис. 7.4, 7.5).
Рис. 7.5. Концепция автономного промышленного робота. а - неавтономный мобильный промышленный робот; б - автономный промышленный робот
Базовая конфигурация системного робота содержит шесть функциональных модулей (табл. 7.1). Концентрация целевых научно-исследовательских разработок на этих шести направлениях позволит создать основу (ядро) интеллектуального робота, способного выполнять различного рода работы.
Таблица 7.1. Функциональные модули системного робота
На рис. 7.6 приведен пример робота для обследования и профилактического обслуживания помещения ядерного реактора. На протяжении десяти лет, прошедших с начала этой разработки, удалось разрешить только проблему автономности робота; поэтому при выборе решения о том, какими путями и методами будет обеспечен необходимый уровень интеллекта робота, остановились на дистанционном управлении роботом, которое выполняет человек-оператор со специального пульта. В этой связи повысилась значимость системы информационного обмена человека с роботом (пункт F в табл. 7.1). Показанный на рис. 7.6 робот для обследования атомных реакторов в основном работает в режиме дистанционного управления человеком, но даже и в этом случае оказалось необходимым придание роботу достаточно сложных функций автономного поведения.
Рис. 7.6. Пример робота для проведения профилактических работ в помещении ядерного реактора
На рис. 7.7 показан робот "Merukongu", обеспечивающий транспортировку пациентов, который был разработан в Научно-исследовательском институте "Кикай гидзюцу" (Токио, Япония). Этот робот, который можно рассматривать как один из примеров "автономного робота", включает в себя: автономное транспортное средство с возможностью перемещения в любом направлении; источник энергии; датчики; устройство управления; манипулятор, обеспечивающий подъем пациента с постели и его перемещение; устройство связи человека с ЭВМ, позволяющее роботу передавать команды даже человеку, который не в состоянии управлять рукой.
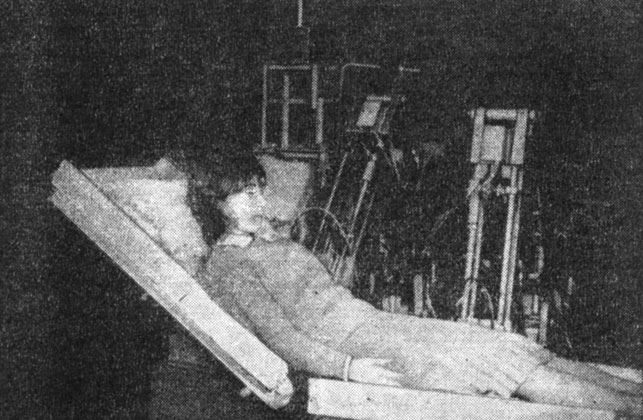
Рис. 7.7. Мобильный робот 'Merukongu' для медицинского обслуживания пациентов
Общее представление о проекте "Промышленный робот с предельными возможностями"
Крупномасштабный проект "Промышленный робот с предельными возможностями" был предложен с целью разработки и определения реально достижимых параметров основных систем и технологических узлов промышленного робота и его использования не только в обрабатывающей промышленности. На реализацию проекта было ассигновано около 20000 млн. иен. В проекте нашла практическое воплощение рассмотренная выше концепция автономного промышленного робота, поскольку основные моменты разработки и исследования главных функциональных модулей автономного промышленного робота и промышленного робота с предельными возможностями в целом совпадают*.
* (Автор этой книги является одним из участников (разработчиков) этого проекта.)
Работа ведется при содействии и под руководством японской организации "Роботто когёкай", которая является официальным представителем этого проекта в государственно-административном аппарате и промышленных кругах. Потребовалось довольно длительное время, чтобы работа вошла в нормальное русло и стала приносить результаты. Хотя проект объединил промышленные и научно-инженерные круги, вопросы научно-технической проработки функциональных модулей и проекта робота в целом преимущественно ведут научно-исследовательские институты "Кикай гидзюцу" и "Дэнки гидзюцу сого кэнкюсе" (Токио, Япония), в то время как прикладные вопросы применения опытных разработок (их адаптации к особенностям производственного процесса) взяли на себя ряд предприятий-представителей отраслей промышленности, заинтересованных в расширенном применении роботов.
Объектом исследования, в частности, являются производственная среда и роботизируемый технологический процесс - анализируется "работа высокого уровня сложности (требующая высокой квалификации), которая не может быть выполнена человеком в настоящее время, а также работа в экстремальных средах", кратко формулируемая как работа на пределе возможности исполнения. Система для выполнения такой работы высокого уровня сложности, способная заменить в этом качестве человека, представляет собой промышленный робот с предельными возможностями, разработка которого и определение необходимой технологии являются целью этого проекта. Хотя по мере реализации проекта неизбежны, по-видимому, некоторые изменения, уже сейчас можно перечислить основные направления исследований и разработок.
Средства перемещения - методы и средства эффективного перемещения с адаптацией к внешней среде робота с помощью транспортной машины колесного или шагающего типа.
Средства манипулирования - методы и средства создания манипулятора с возможностью управления по усилию и сложного перемещения, а также методы и средства выполнения манипуляционных операций многозвенным, многопалым манипулятором с захватным приспособлением.
Средства восприятия внешней среды - методы и средства создания сенсорных устройств и отдельных датчиков для получения информации об окружающей среде, а также способы обработки этой информации и высокоэффективного распознавания среды.
Системы приводов - методы и средства создания высокоэффективных систем приводов, их тестирования и диагностики.
Средства управления роботом - методы и системы управления (координированного, интегрального) средствами перемещения робота и его манипуляционной системой с учетом результатов анализа поступающей от датчиков информации, обработки этой информации и автономного принятия решения о целесообразном поведении робота.
Средства, обеспечивающие эффект присутствия оператора, - системы управления, позволяющие сочетать интеллектуальные возможности человека-оператора с техническими средствами, обеспечивающими ему "эффект присутствия" на участке выполнения работы благодаря возможности с высокой степенью правдоподобия и в реальном масштабе времени передавать человеку требуемую информацию к дистанционному управлению роботом.
Телеоператорные средства - методы и средства обеспечения диалогового режима работы человека и робота для эффективного функционирования последнего.
Общая системотехника - адаптация перспективных проработок но проекту к конкретным областям применения и выработка общего системного подхода к проблематике проекта по результатам проведения системных исследований, ориентированных на анализ и формализованное представление работ на пределе возможности исполнения.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'