Технические характеристики
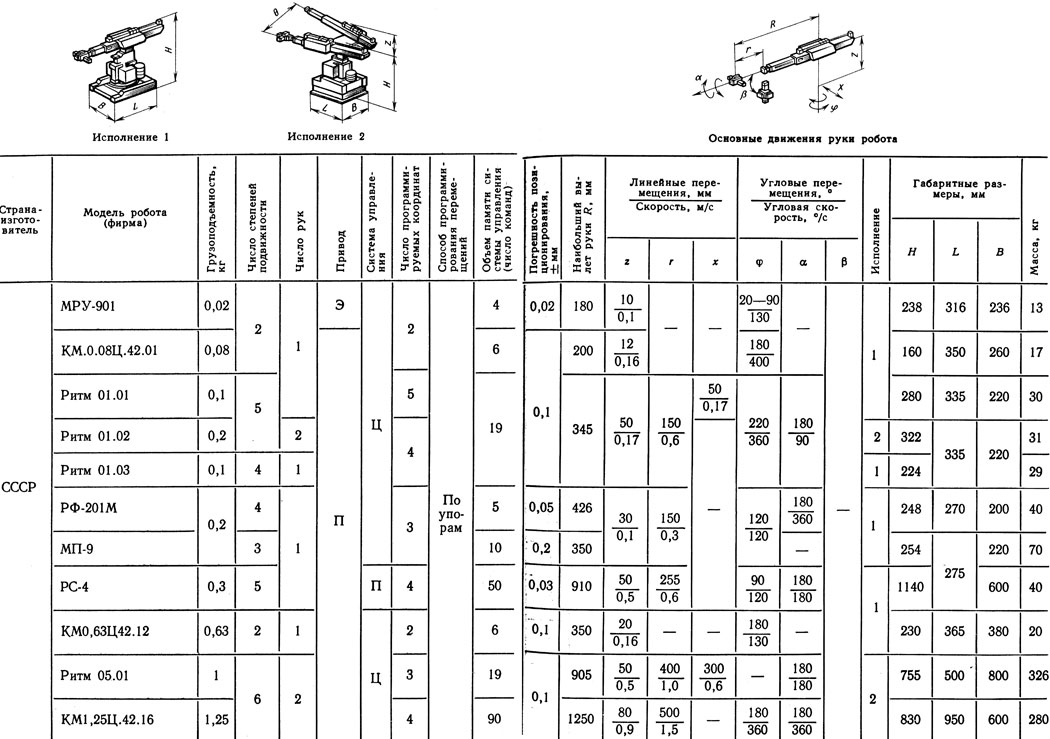
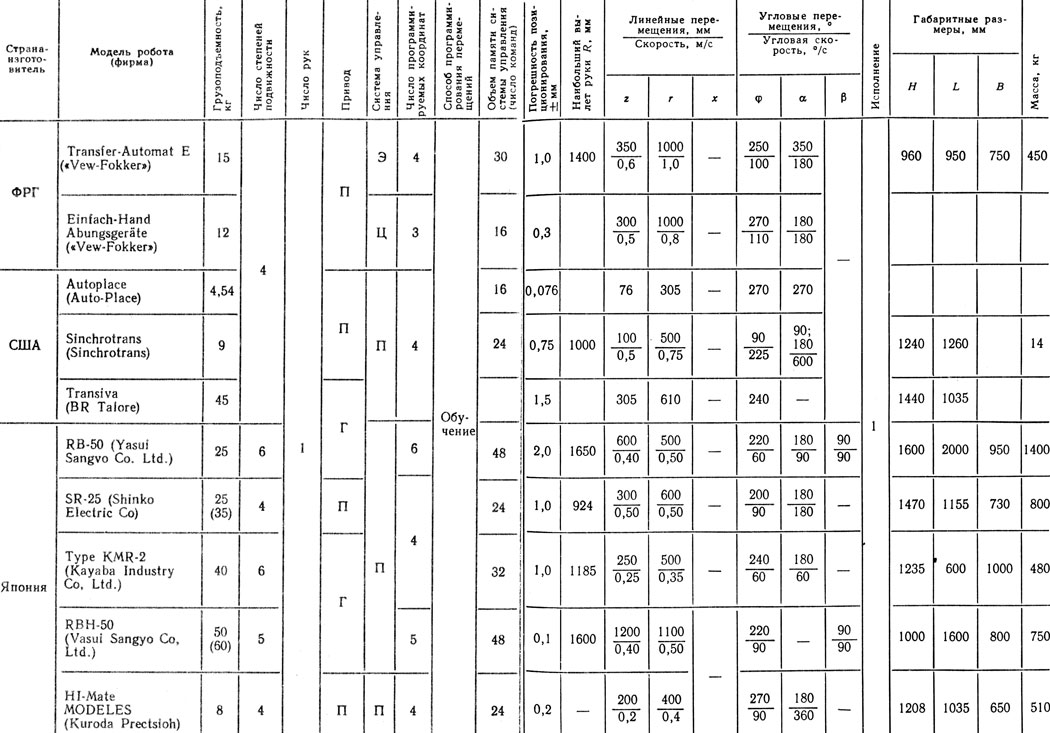
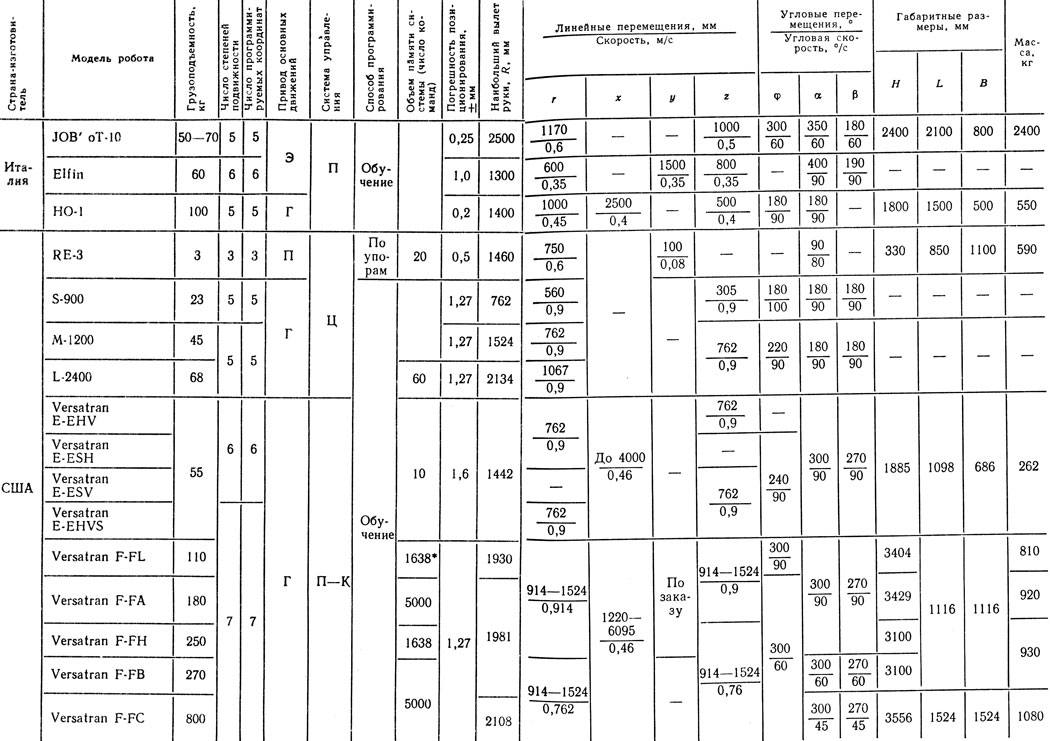
Таблица 3. Технические данные напольных промышленных роботов с выдвижной рукой и консольным механизмом ее подъема
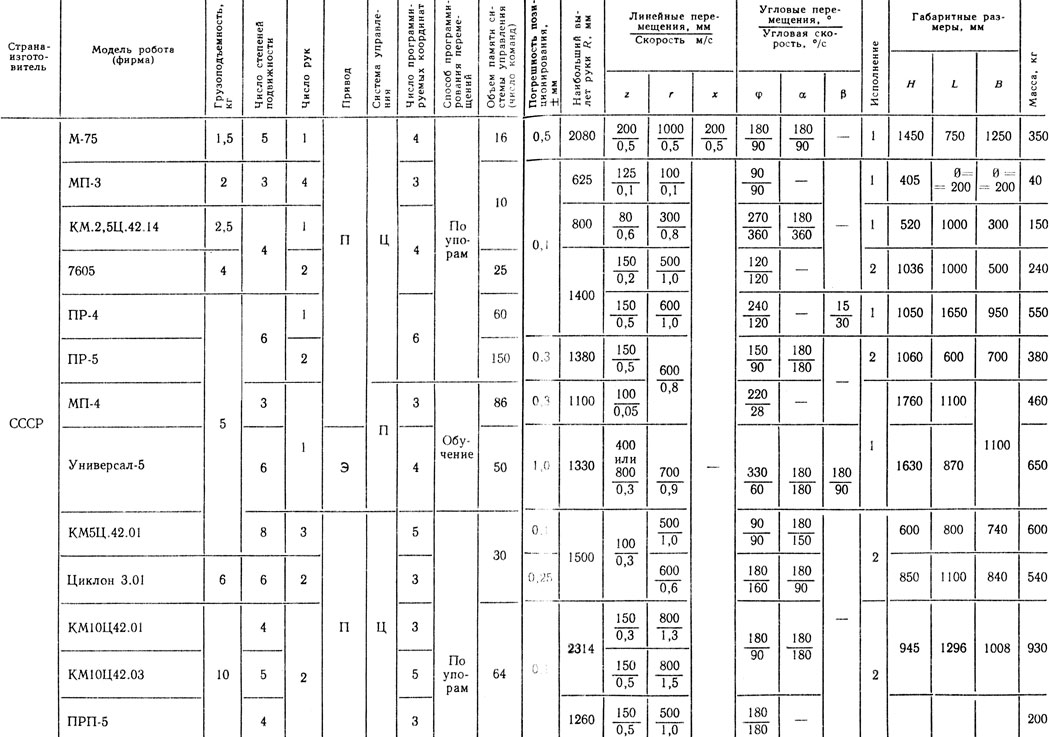
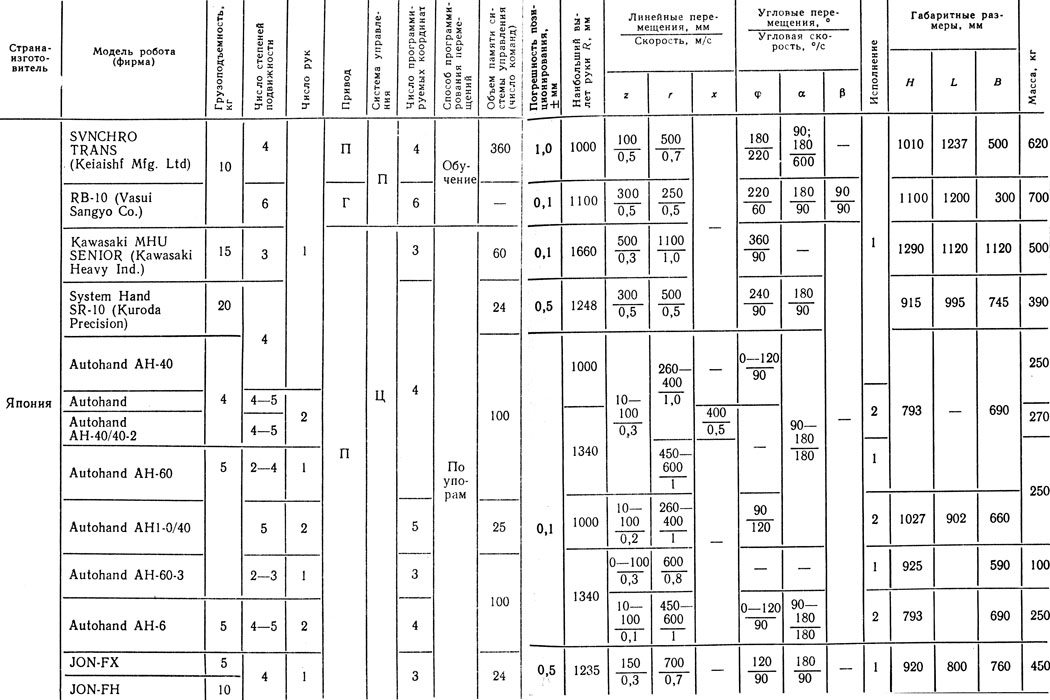
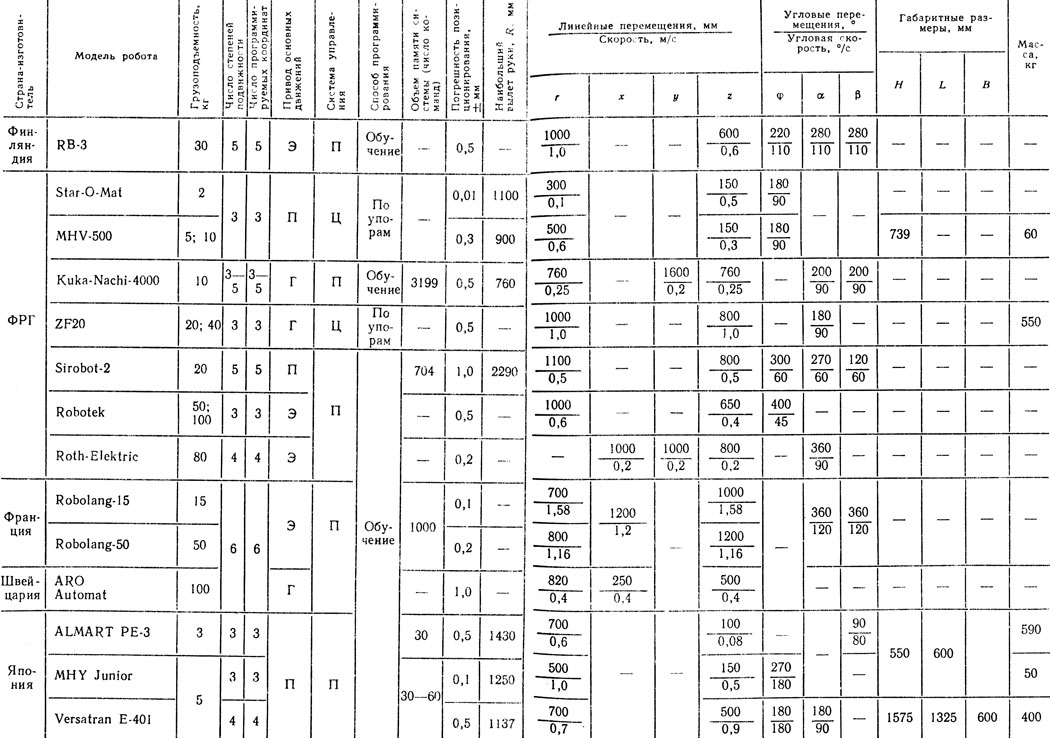
Продолжение таблицы 3
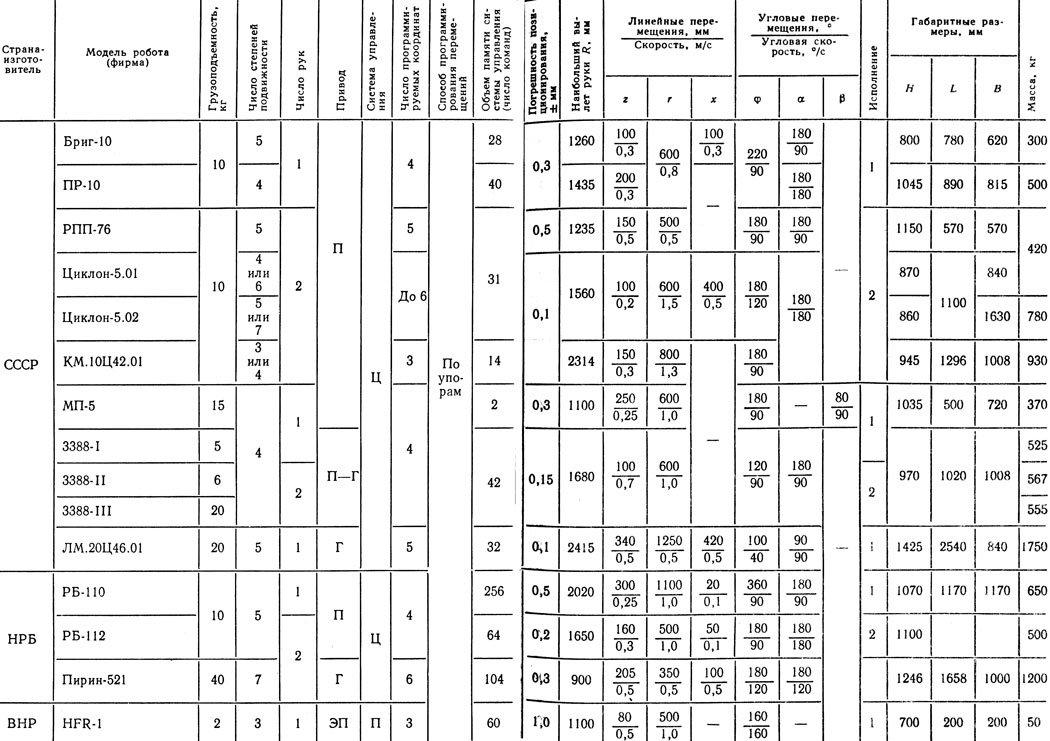
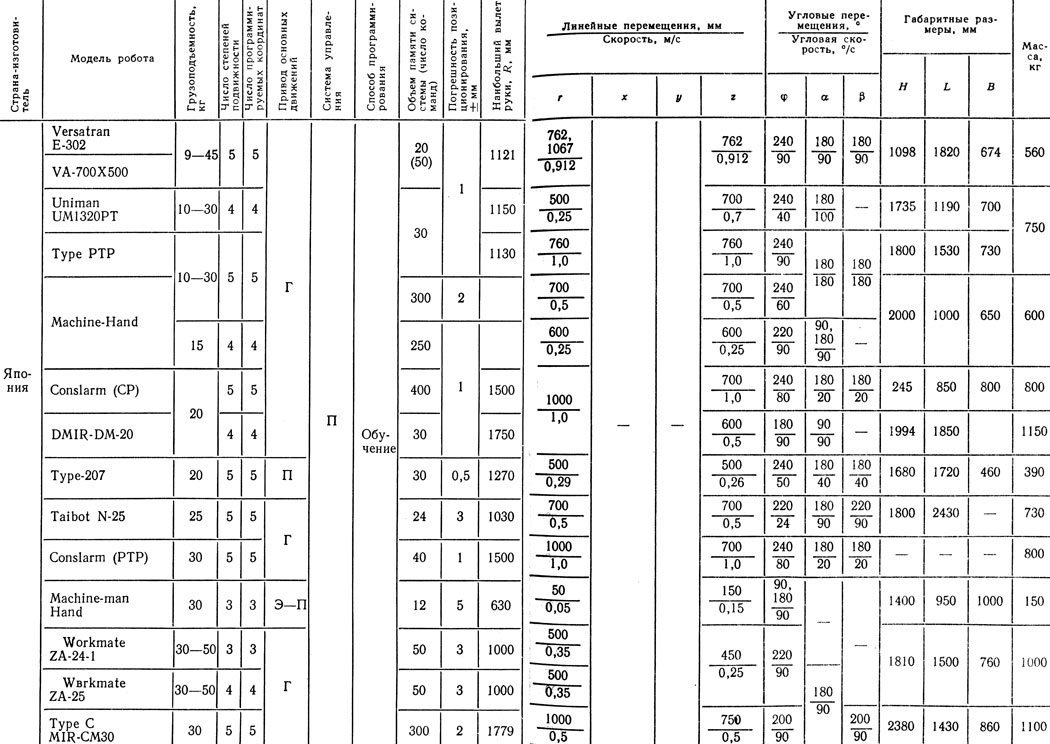
Продолжение таблицы 3
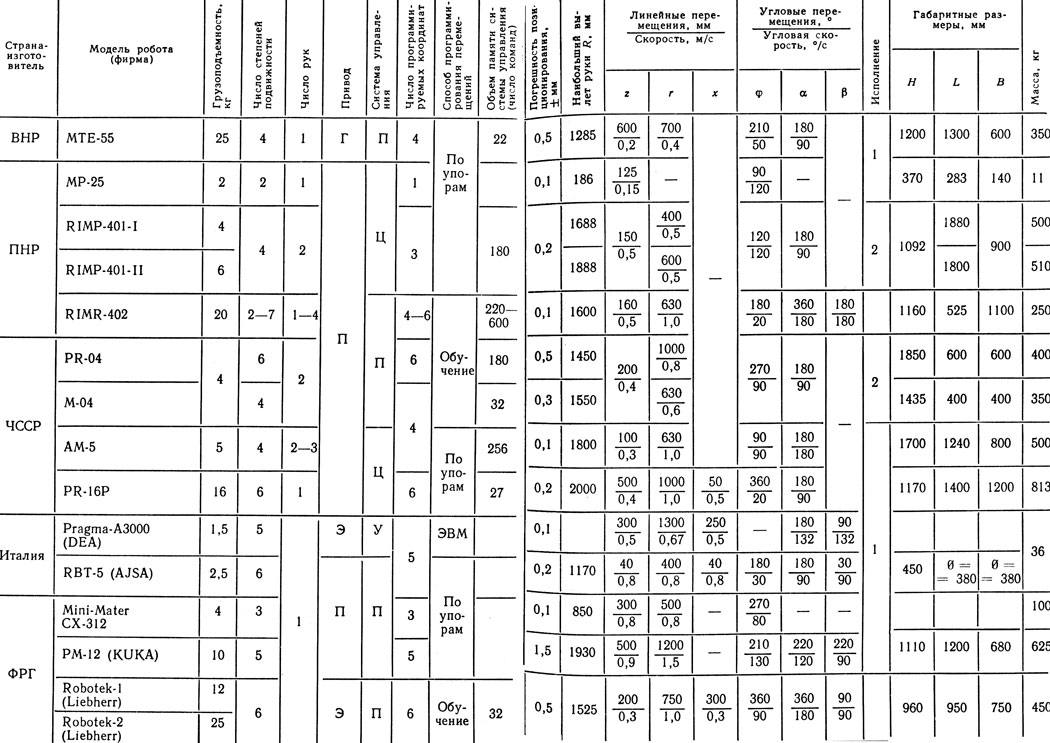
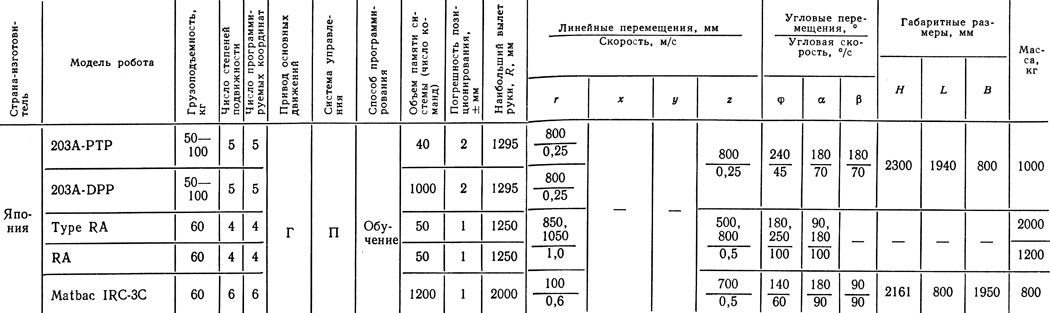
Продолжение таблицы 3
Продолжение таблицы 3
Продолжение таблицы 3
Примечание.
- У мод. МП-3 четыре руки расположены крест-накрест. У мод. RIMP-402 и "Пирин-521" руки попарно расположены под углом 180°.
- 1°/с = 0, 017453 рад/с.
В табл. 3-15, 17-22 и 24-31 приведены технические данные 527 моделей современных ПР. Роботы сгруппированы по странам и систематизированы по общим конструктивно-технологическим признакам. Внутри каждой подгруппы ПР располагаются в порядке возрастания грузоподъемности. Модели, технические данные которых не соответствуют принятой систематизации, приведены отдельно. Технические данные ПР агрегатного типа и отдельных образцов роботов с адаптивным управлением, а также ПР, отличающихся характером применения, представлены в соответствующих разделах.
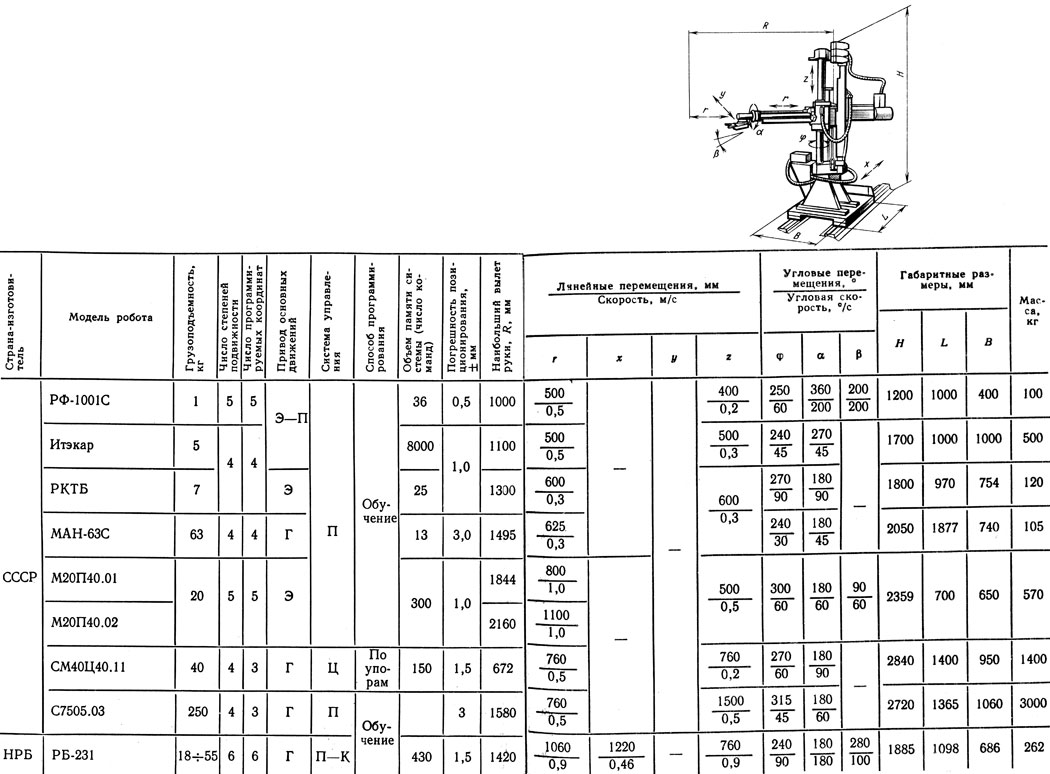
Таблица 4. Технические данные напольных промышленных роботов с горизонтальной выдвижной рукой и подъемной каретой
Продолжение таблицы 4
Продолжение таблицы 4
Продолжение таблицы 4
Продолжение таблицы 4
Продолжение таблицы 4
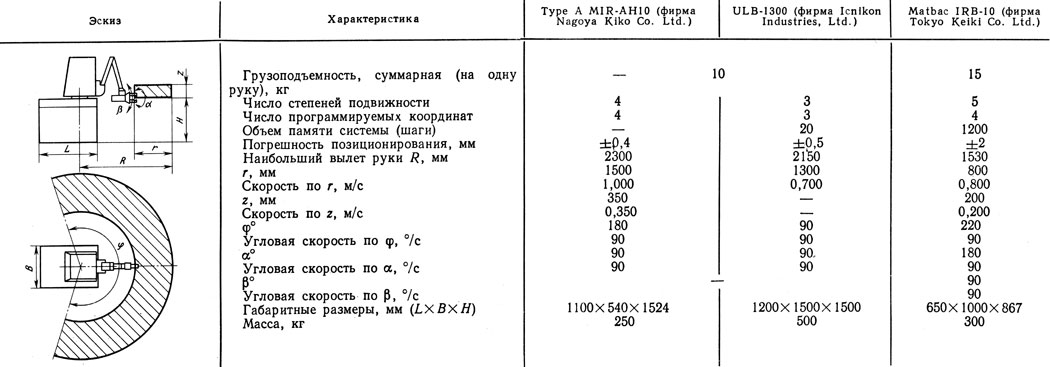
Таблица 5. Технические данные промышленных роботов со складывающейся рукой и подъемной каретой (Япония)
Примечание. Число рук (захватов на руку) 1(1). Привод - гидравлический. Система управления - позиционная. Способ программирования системы - обучение.
В таблицах указана суммарная грузоподъемность ПР независимо от числа рук. При этом приведена максимальная грузоподъемность, обеспечиваемая при наибольших скоростях рабочих движений. Масса захватного устройства (устройств) входит в грузоподъемность. Число степеней подвижности приведено без учета движения зажима.
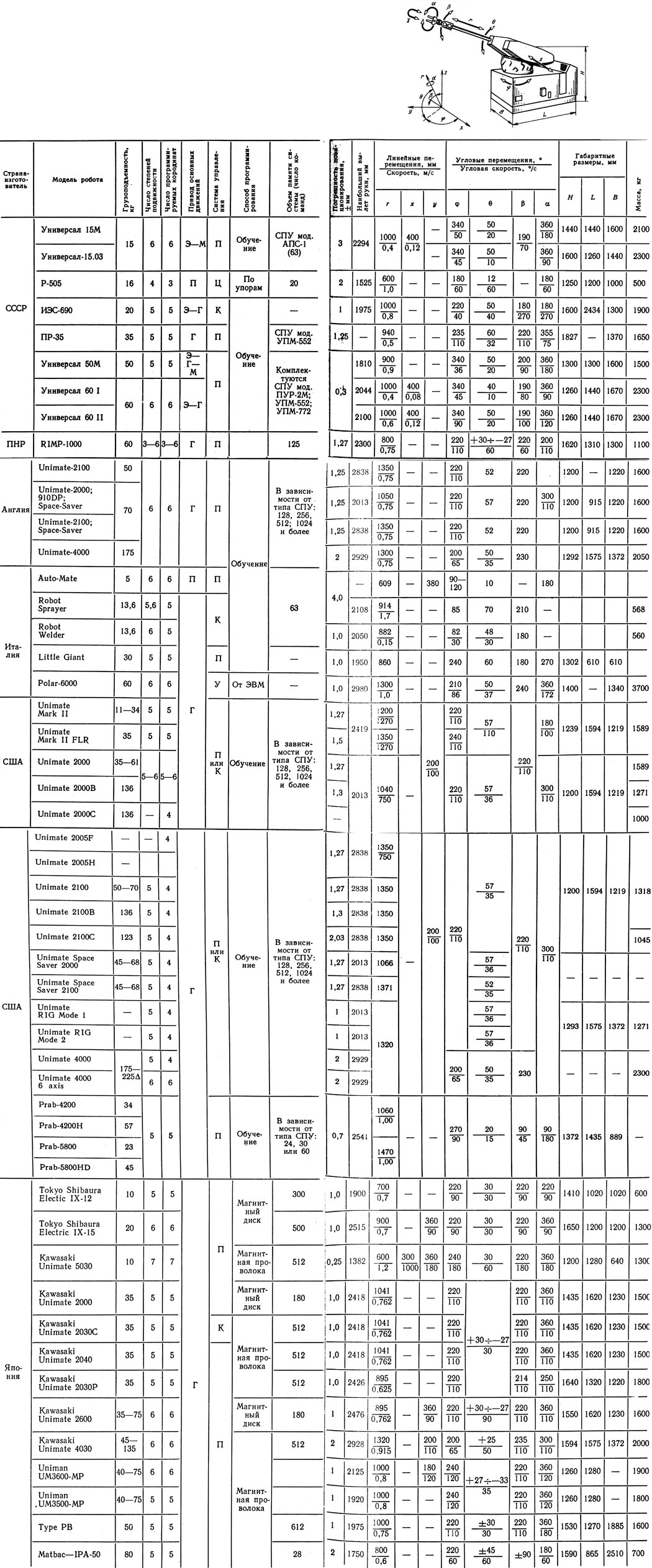
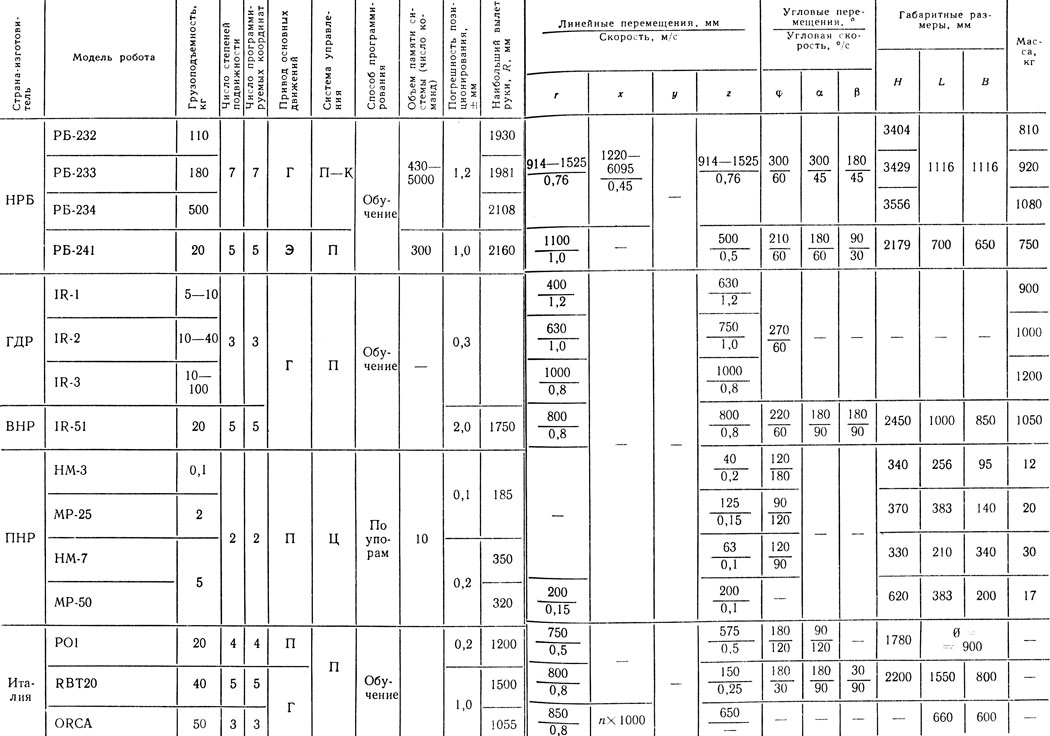
Таблица 6. Технические данные напольных промышленных роботов с выдвижной рукой, работающей в сферической системе координат
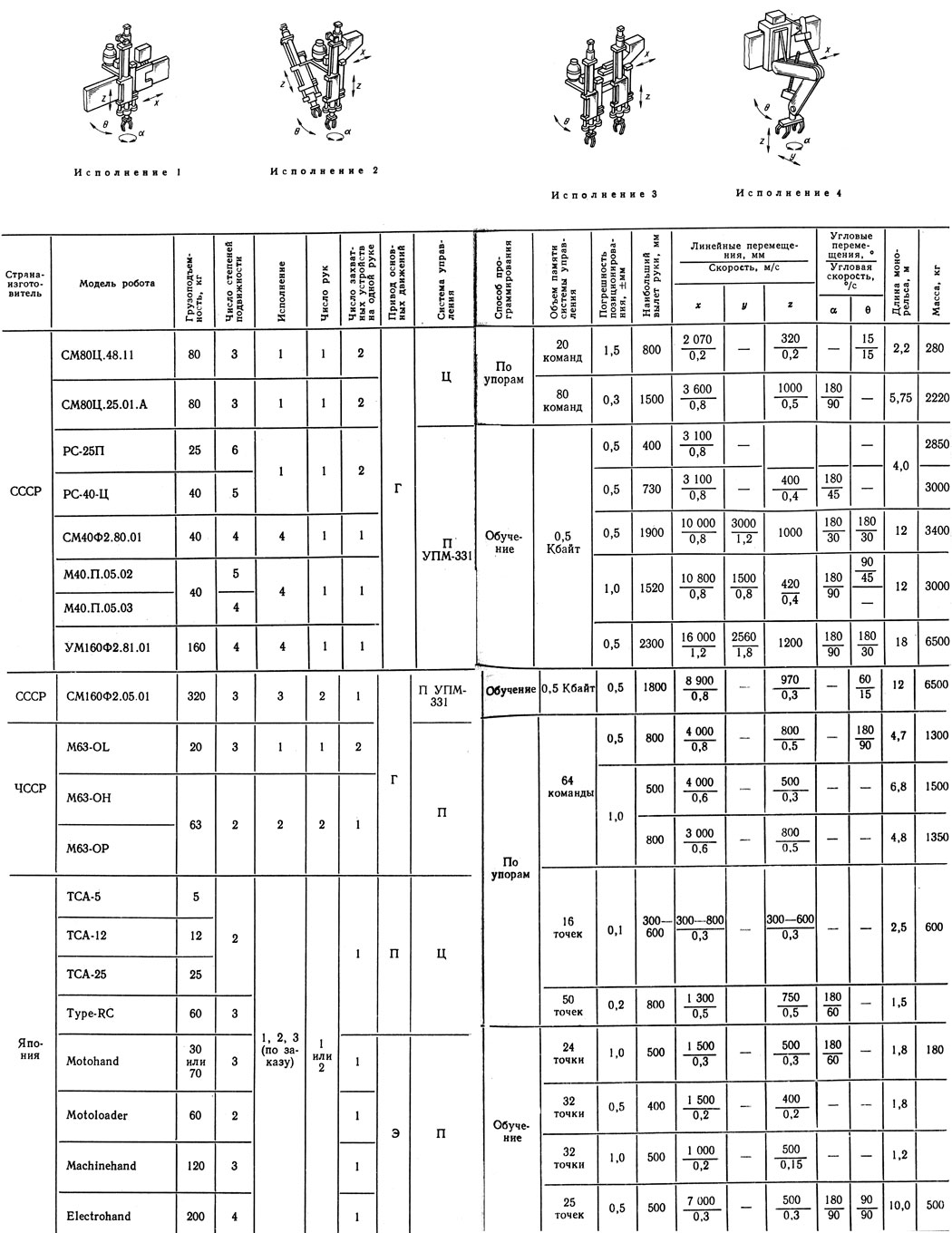
Таблица 7. Технические данные подвесных промышленных роботов тельферного типа
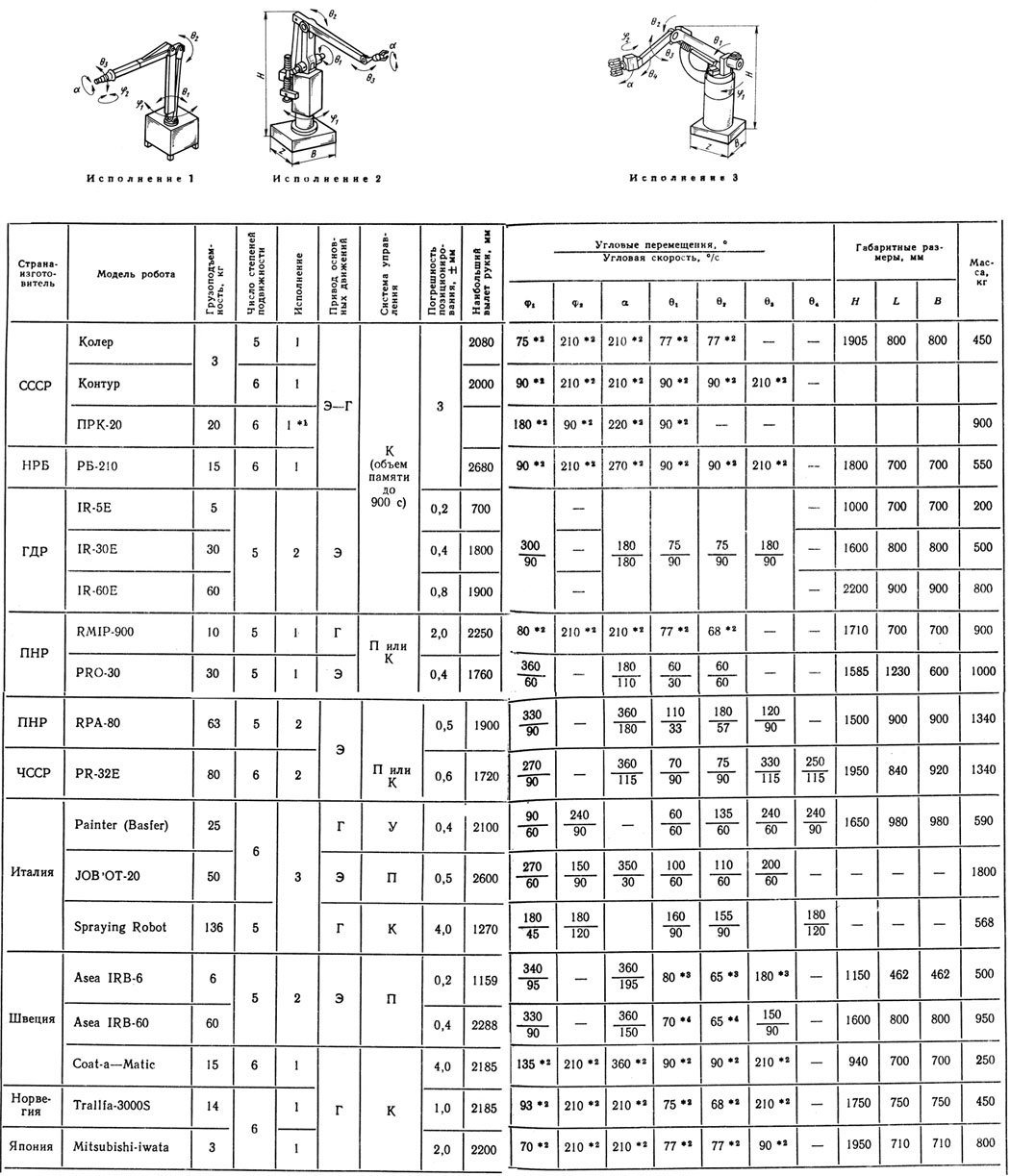
Таблица 8. Напольные промышленные роботы с многозвенной рукой
*1 (Основание робота может перемещаться по рельсам на 1500 мм.)
*2 (Максимальная рабочая скорость руки робота при сложении всех угловых движений - до 2 м/с.)
*3 (Скорость (м/с) руки робота при сложении всех угловых движений: до 1,1 (вверх-вниз) и до 0,75 (вперед-назад).)
*4 (При сложении всех угловых движений скорость (м/с) руки робота: до 1,5 (вверх-вниз) и до 1,0 (вперед-назад).)
Примечание. Метод программирования - обучение.
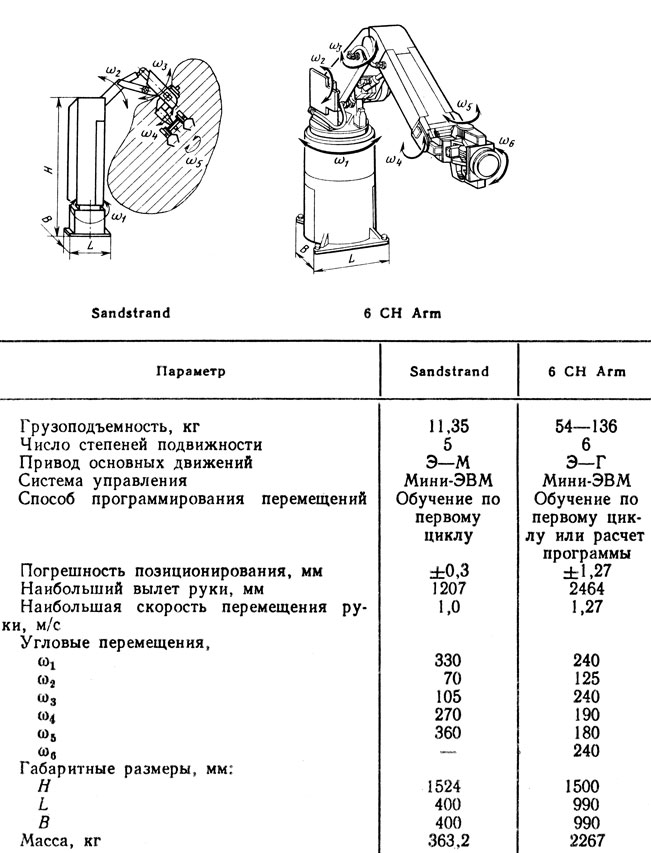
Таблица 9. Технические данные промышленных роботов с многозвенной рукой моделей Sandatrand (фирма Sandstrand Machine Tool) и 6 CH Arm (фирма Cincinnati Milacron) производства США
Примечание. Система управления - от мини-ЭВМ.
Условные обозначения следующие. Тип привода: П - пневматический, Г - гидравлический, Э - электрический. Система управления: Ц - цикловая, П - позиционная, К - контурная, У - универсальная, ЭВМ - управление с использованием ЭВМ. Прочерки означают отсутствие технического показателя, пустые клетки - отсутствие технических данных.
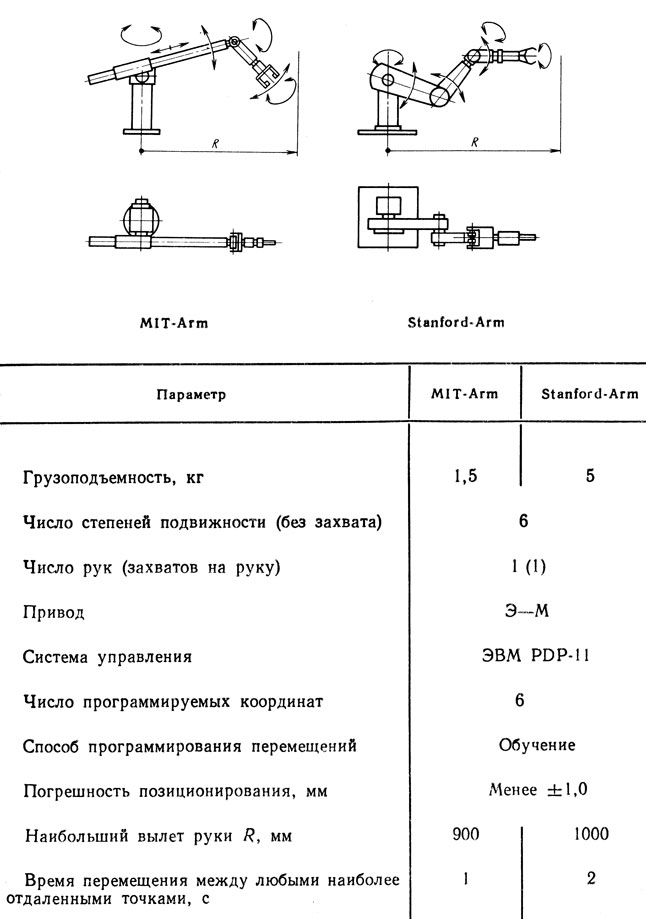
Таблица 10. Технические данные промышленных роботов фирмы Vicarm Inc. (США)
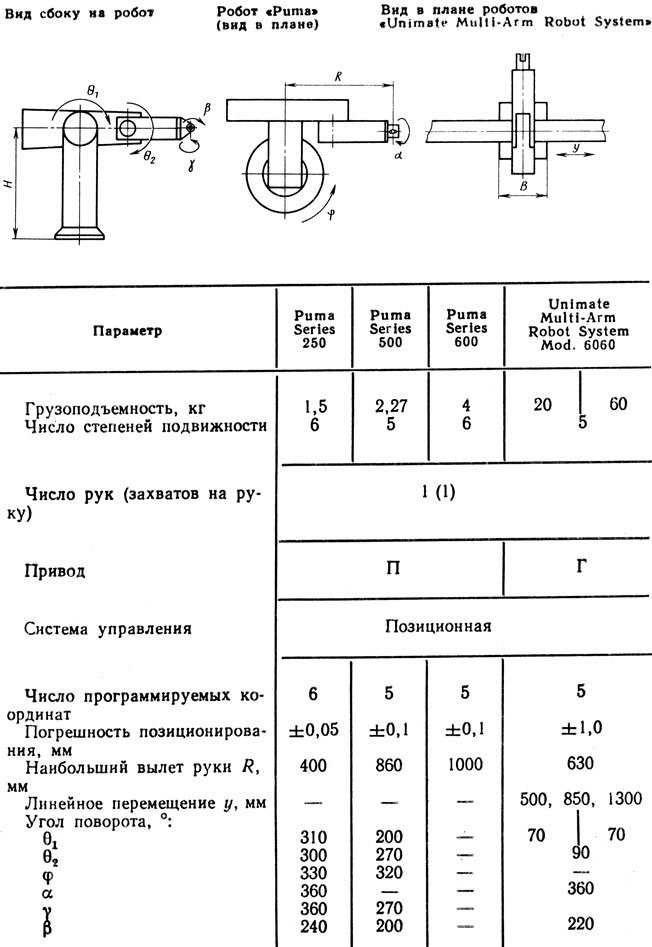
Таблица 11. Технические данные промышленных роботов с многозвенной рукой фирмы Unimation (Europe) (Англия)
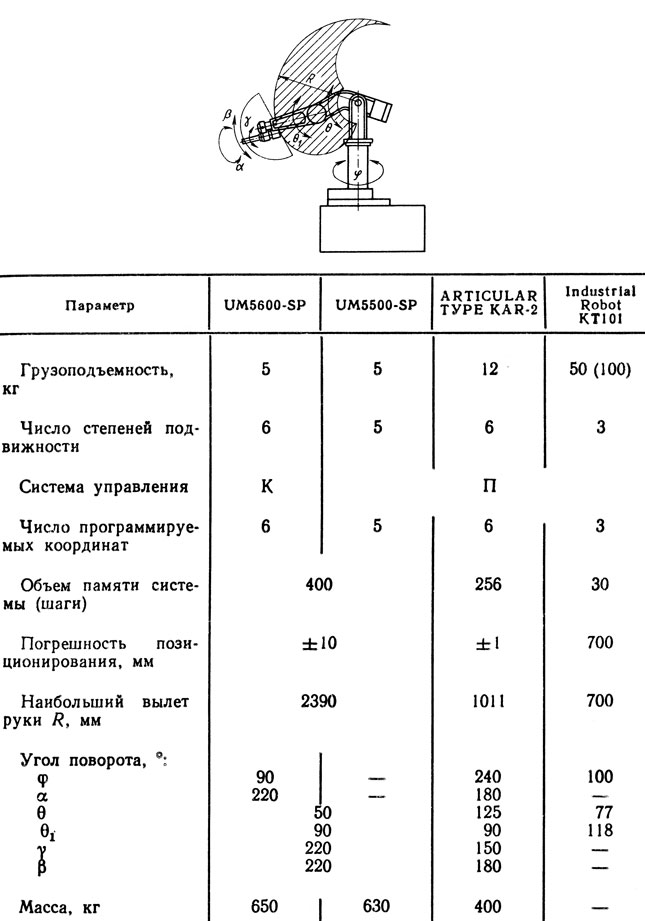
Таблица 12. Технические данные напольных промышленных роботов с антропоморфной рукой (Япония)
Примечание. Привод гидравлический. Метод программирования - обучение.
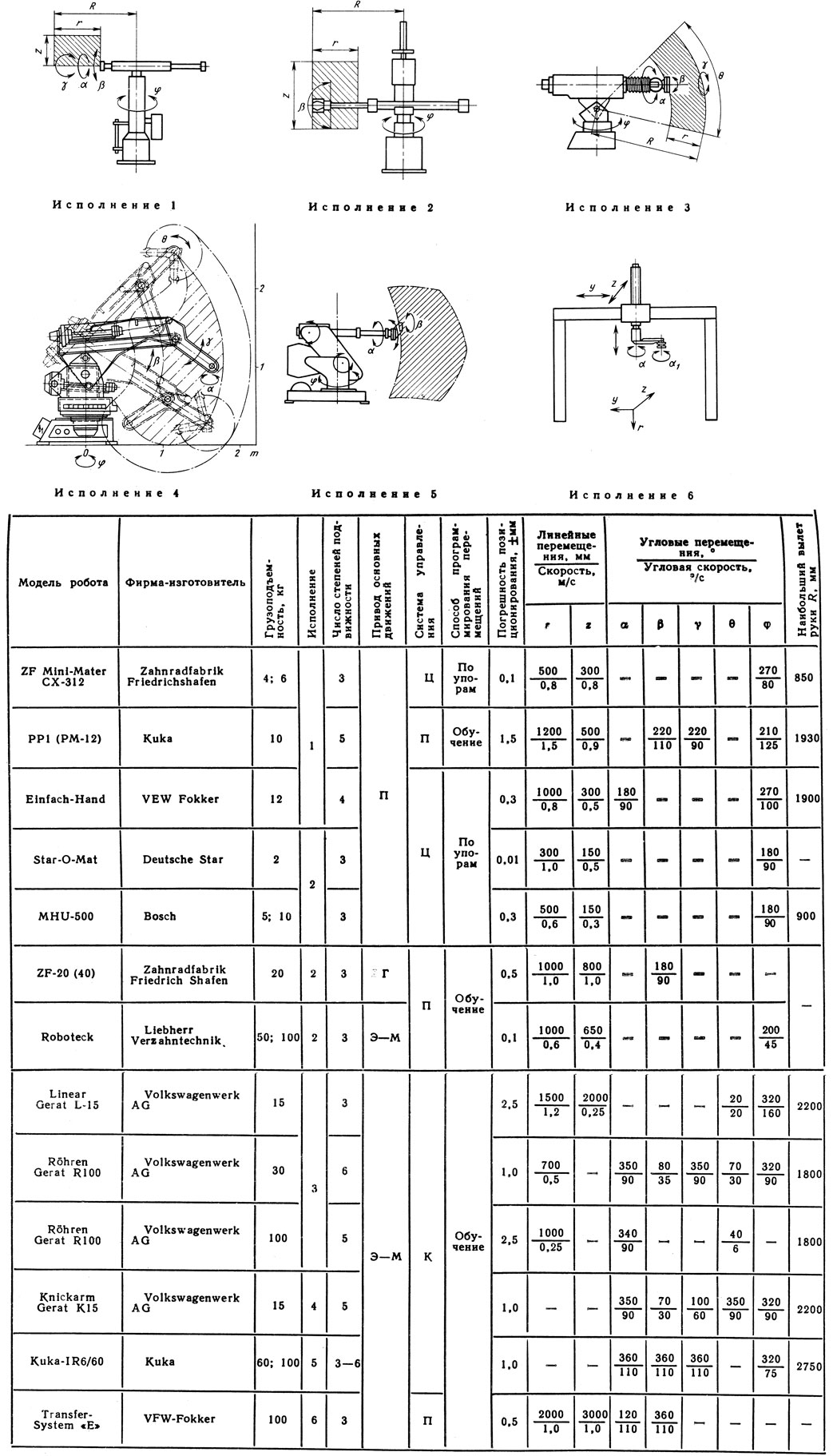
Таблица 13. Технические данные промышленных роботов (ФРГ)
Дополнительные сведения о технических характеристиках современных промышленных роботов можно найти в работах [39, 40, 48].
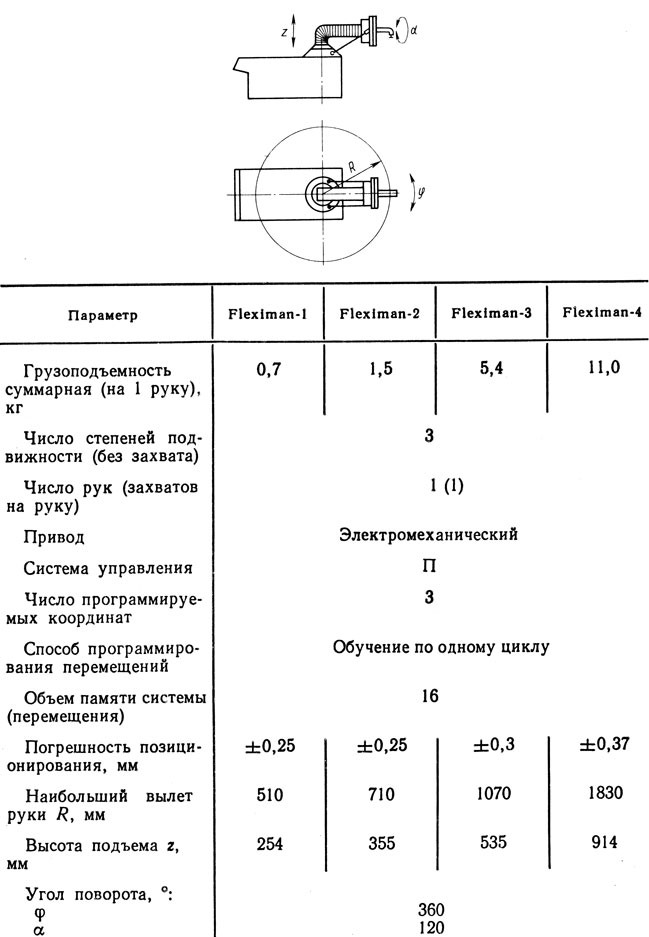
Таблица 14. Технические данные промышленных роботов 'Fleximan' фирмы AMF (США)
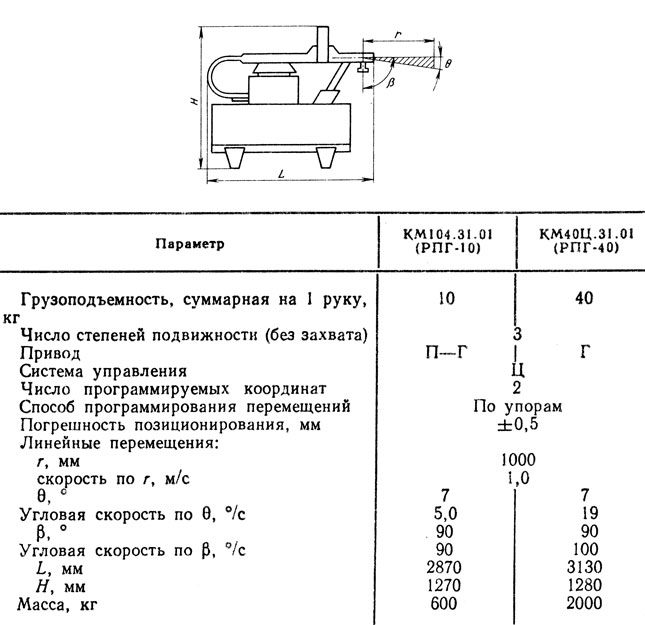
Таблица 15. Технические данные промышленных роботов для обслуживания горячештамповочных прессов
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'