Интерактивные промышленные роботы
Управление интерактивными роботами осуществляется попеременно: оператором или автоматической системой.
Промышленный робот МКП-2,5 предназначен для работы в составе ковочных комплексов нагревательное устройство - ковочный пресс (усилием до 5000 МН) - манипулятор; оснащен автоматизированной системой ЧПУ, обеспечивающей чередование во времени автоматического режима управления с биотехническим. Манипулятор (рис. 39) грузоподъемностью в 2,5 т - напольный, рельсового типа. Тележка 1 перемещается по двухрельсовому пути на четырех колесах. Наибольшее перемещение 10 м, скорость - до 0,6 м/с. Длина участка полного затормаживания тележки не превышает 5 см. Тормозной путь останова руки при движущейся тележке 1-1,5 см. При ковке под действием бойка пресса поковка и рука 3 манипулятора могут упруго опускаться. Усилия демпфируются гидропневматическим аккумулятором. Наибольший вылет руки 1180 мм; вертикальный ход руки 455 мм; скорость вертикального хода 0,07 м/с. В горизонтальной плоскости предусмотрено программируемое смещение руки относительно тележки на ±150 мм. Угол поворота клещей 360°. Масса манипулятора 20 т.
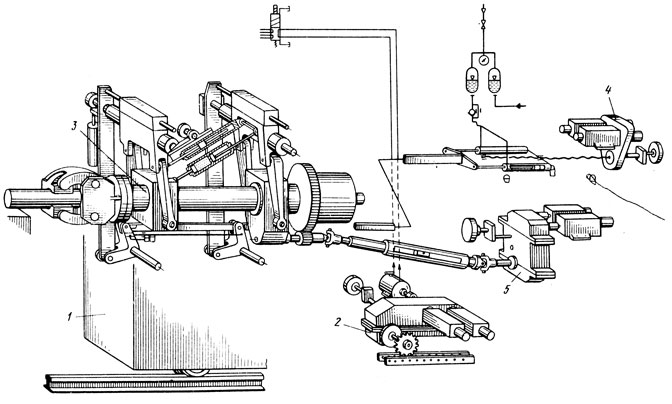
Рис. 39. Кинематическая схема манипулятора МКП-2,5: 1 - тележка манипулятора; 2 - редуктор осевого перемещения тележки с электродвигателями и гидравлическим насосом; 3 - рука (хобот) с клещами и гидравлическим механизмом зажима; 4 - редуктор подъема хобота с электродвигателями; 5 - редуктор вращения хобота с электродвигателями
Привод продольного движения тележки осуществляется от двух электродвигателей через редуктор и звездочку, сцепленную с неподвижными цевками.
Система ЧПУ четырехкоординатная, обеспечивает три программируемых движения манипулятора (подъем руки, перемещение руки параллельно рельсовому пути и ротацию клещей) и управляет движением бойка пресса. Зажим клещей, боковой сдвиг руки параллельно фронту пресса и движение тележки по рельсам управляются вручную. Объем информации на ленте системы ЧПУ 20-100 кадров; длительность обработки кадра 6-60 с; средняя продолжительность автоматической ковки 10-20 мин.
Оператор, вручную управляя манипулятором, обеспечивает захват заготовки из нагревательного устройства, перенос ее в рабочую зону пресса, съем и укладку готовой поковки. Ковка происходит автоматически по сигналу оператора.
При необходимости оператор может управлять вручную работой всего комплекса" для чего предусмотрена одна комбинированная рукоятка управления.
Роботы с супервизорным управлением, в которых переход от одного автоматического цикла к другому осуществляется по целевым командам оператора, еще не нашли промышленного применения. Описания конструкций отдельных экспериментальных образцов см. в работах [36, 37, 57-59].
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'