Приводы и элементы автоматики
Выбор типа привода зависит от функционального назначения ПР. Основными факторами, определяющими выбор типа привода, являются назначение и условия эксплуатации ПР, грузоподъемность и требуемые динамические характеристики конструкции, вид системы управления. Независимо от вида привода к нему предъявляются следующие общие требования:
минимальные габаритные размеры и высокие энергетические показатели, обеспечивающие большую величину отношения выходной мощности к массе;
- возможность работы в режиме автоматического управления и регулирования с обеспечением оптимальных законов разгона и торможения при минимальном времени переходных процессов;
- быстродействие - осуществление движений исполнительных механизмов с высокими скоростями и малой погрешностью позиционирования;
- малая масса элементов привода при высоком КПД всей конструкции;
- обеспечение безопасности (путем минимизации времени торможения, легкости отключения привода и снятия прикладываемого усилия, блокирования привода и сохранения положения исполнительных механизмов при команде "Стоп");
- возможность встраивания систем охлаждения и терморегулирования для обеспечения приемлемых тепловых режимов работы привода и стабильности его характеристик;
- надежность элементов конструкции; удобство монтажа, обслуживания, ремонта и переналадки;
- низкий шум.
Промышленные роботы оснащают электрическими, пневматическими и гидравлическими приводами.
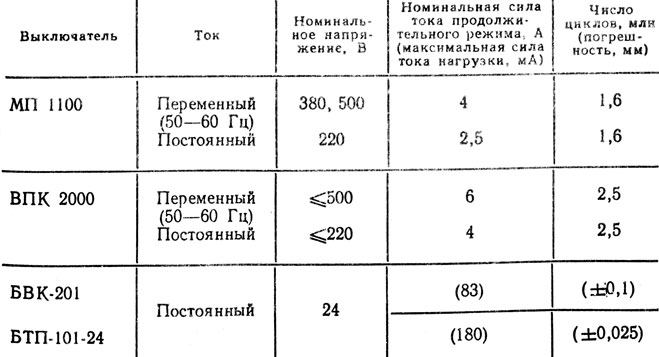
Таблица 16. Технические данные конечных выключателей

Таблица 17. Технические данные автоматических выключателей
Примечание. Напряжение, В; 500 - при переменном токе; до 220 - при постоянном токе.
Элементы электроавтоматики и электропривода промышленных роботов. Устройства электроавтоматики ПР обеспечивают логическое преобразование выходных сигналов устройства управления, а также сигналов датчиков ПР и связанного с ним оборудования и устройств; силовое преобразование выходных сигналов устройства управления до уровня, необходимого для срабатывания соответствующих силовых элементов (магниты, пускатели и т. п.). Логическая и силовая части электроавтоматики располагаются, как правило, в электрическом шкафу, где размещается и блок питания. В состав электроавтоматики входят датчики различных типов (путевые выключатели, реле давления и т. п.), обеспечивающие контроль отдельных параметров работы ПР. Обычно эти датчики используют для ограничения перемещений отдельных звеньев механической системы, для фиксации исходного (нулевого) положения звеньев по всем координатам, а также в качестве датчиков положения при цикловом управлении отдельными степенями подвижности (зажим-разжим, кантование захватного устройства и т. п.). Выбор типов датчиков определяется условиями их работы. Бесконтактные путевые выключатели применяют там, где частота включений достаточно высока. Контактные конечные выключатели применяют в качестве аварийных для ограничения перемещений или контрольных для проверки исполнения цикловых команд по отдельным степеням подвижности. От коротких замыканий и перегрева электроаппаратуру и коммуникации защищают автоматическими выключателями, реле и предохранителями. Характеристики различных типов устройств электроавтоматики приведены в табл. 16-19.
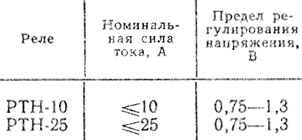
Таблица 18. Технические данные тепловых реле
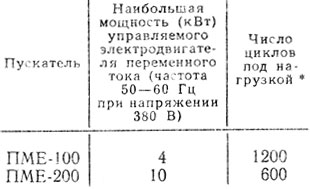
Таблица 19. Технические данные магнитных пускателей
* (При периоде включения 40 % от общего времени работы.)
В состав электропривода входят усилители мощности, управляемые двигатели, передаточные механизмы, датчики обратной связи по скорости и по положению, сравнивающее устройство.
Широкое распространение получил дискретный (шаговый) привод, имеющий две разновидности: привод с управляющим шаговым двигателем (ШД) и промежуточным усилителем момента, выполненным в виде следящей гидравлической системы; привод с силовым ШД, соединенным непосредственно с исполнительным механизмом через механическую передачу (например, модели ЕС-5, ЕС-10, ЕС-20, разработанные в НРБ), Расширяется применение следящих приводов на базе электродвигателей постоянного тока, позволяющих обеспечить простую и надежную схему управления. Разработаны электродвигатели с плоским и гладким роторами, позволяющими повышать быстродействие и обладающими малым моментом инерции. Весьма перспективным является применение малоинерционных высокомоментных электродвигателей, в которых вместо обмотки возбуждения используются постоянные магниты из магнитных материалов с высокой коэрцитивной силой, что позволяет значительно повысить показатели удельной мощности и получить высокую кратность тока и момента по отношению к номинальным.
Легкость регулирования, бесшумность, отсутствие трубопроводов, легкость энергоподводов, простота монтажа и наладки, достаточно высокие показатели надежности - положительные стороны для применения электропривода в конструкциях ПР. Сдерживающим фактором являются низкие показатели удельной мощности: для применения в конструкциях ПР и установки непосредственно на исполнительных звеньях электродвигатели должны иметь удельную мощность 150 Вт/кг. Этим показателям в наибольшей мере отвечают современные электродвигатели постоянного тока с возбуждением от постоянных магнитов.
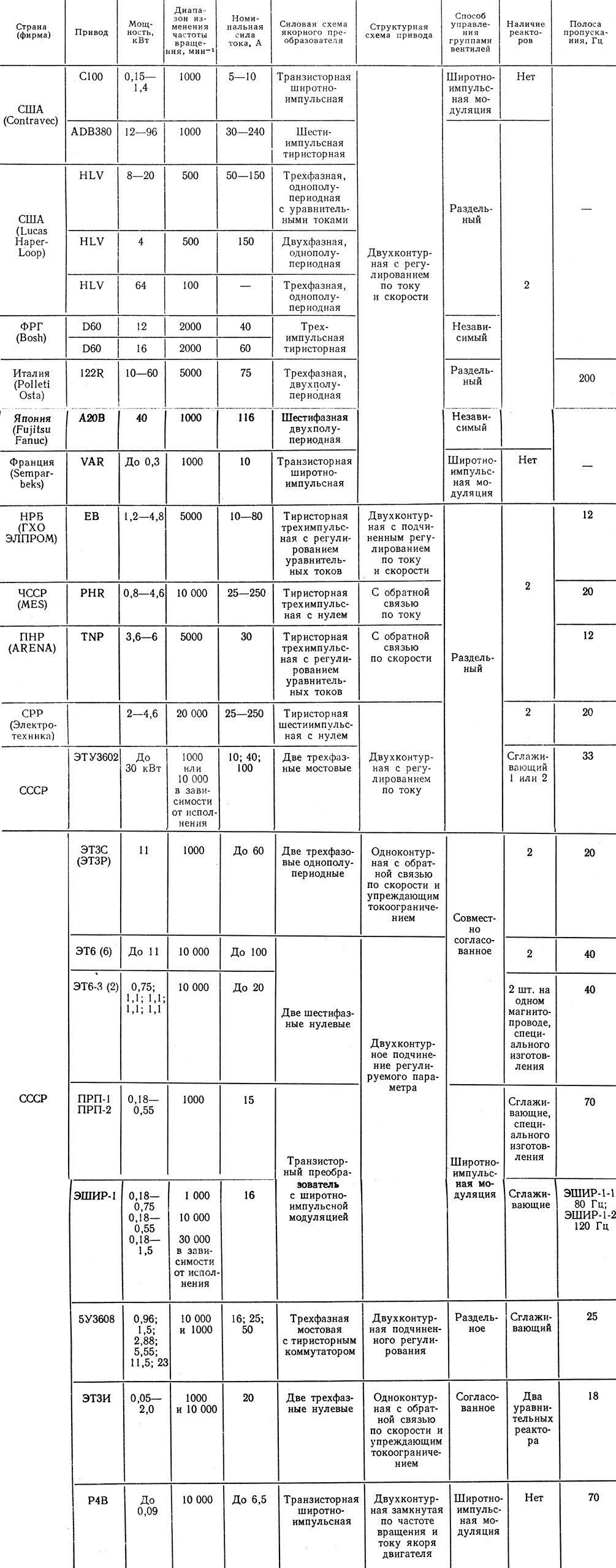
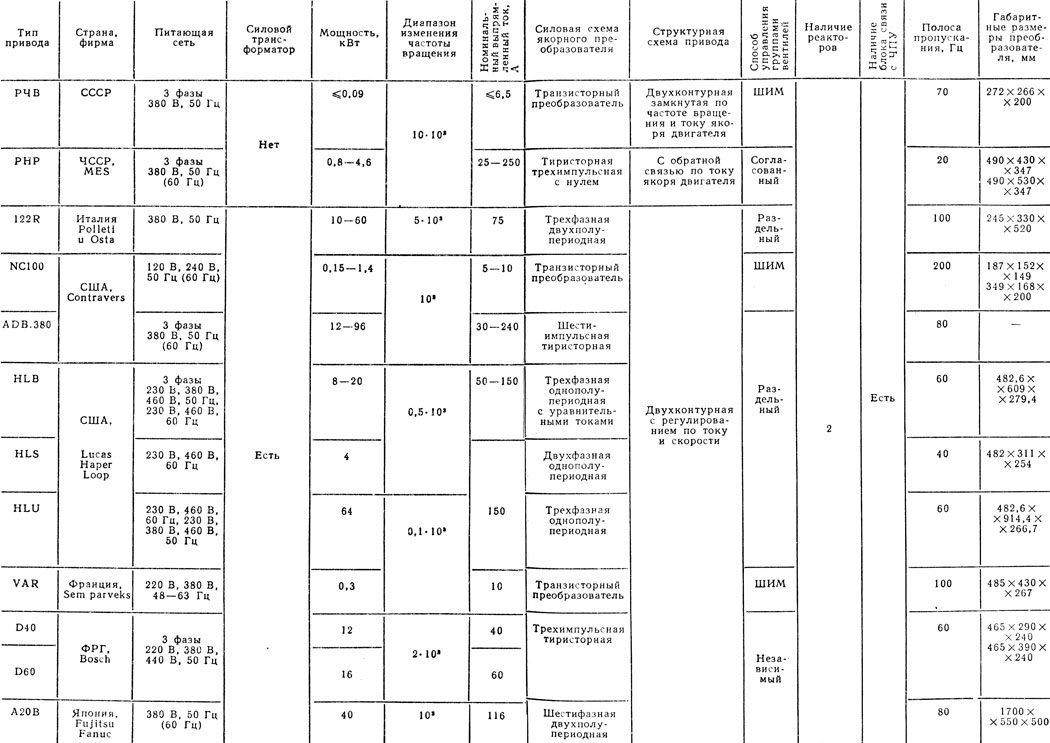
Таблица 20. Технические данные электронных преобразователей
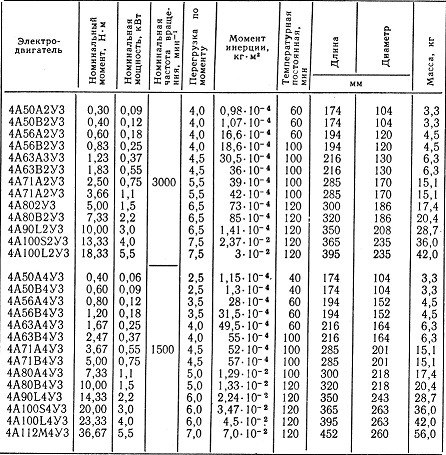
Таблица 21. Технические данные асинхронных двигателей серии 4А (СССР)
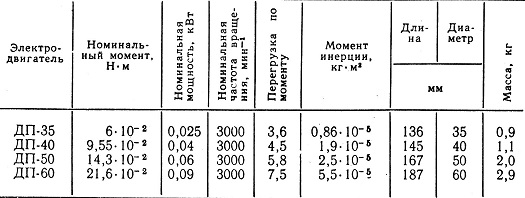
Таблица 22. Технические данные электродвигателей постоянного тока серии ДП (СССР)
Асинхронные двигатели в приводах ПР не получили пока широкого распространения из-за сложности и высокой стоимости электронных преобразователей, обеспечивающих регулирование частоты вращения.
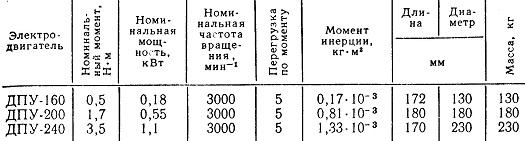
Таблица 23. Технические данные электродвигателей постоянного тока серии ДПУ (СССР)
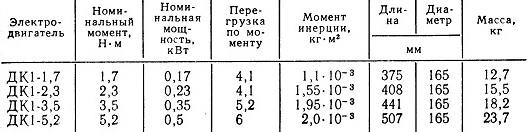
Таблица 24. Технические данные электродвигателей постоянного тока серии ДК-1 (СССР)
Примечание. Номинальная угловая скорость 1000 мин-1.
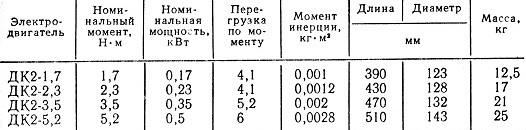
Таблица 25. Технические данные электродвигателей постоянного тока серии ДК-2 (СССР)
Примечание. Номинальная угловая скорость 1000 мин-1.
В табл. 20 приведены технические данные электронных преобразователей, предназначенных для регулирования частоты вращения электродвигателей. В табл. 21-36 приведены основные технические данные электродвигателей, применяемых в составе электроприводов ПР. В табл. 37 (см. с. 204) даны характеристики комплектных электроприводов, рекомендуемых для ПР.
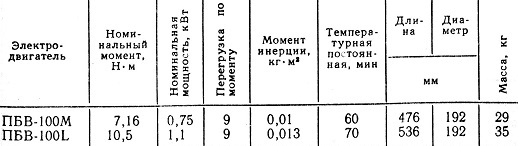
Таблица 26. Технические данные электродвигателей постоянного тока серии ПБВ (СССР)
Примечание. Номинальная угловая скорость 1000 мин-1.
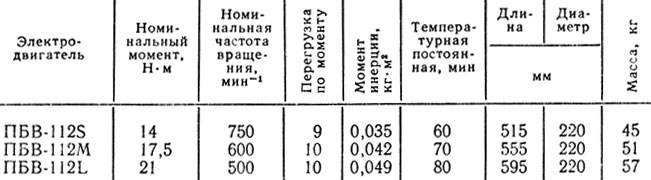
Таблица 27. Технические данные электродвигателей постоянного тока серии ПБВ-112 (СССР)
Примечание. Номинальная мощность 1,1 кВт.
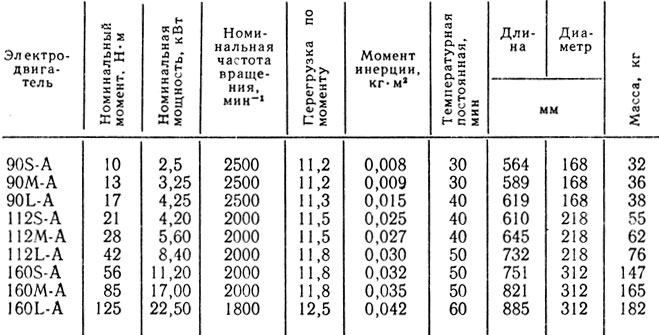
Таблица 28. Технические данные электродвигателей постоянного тока серии А (СССР)
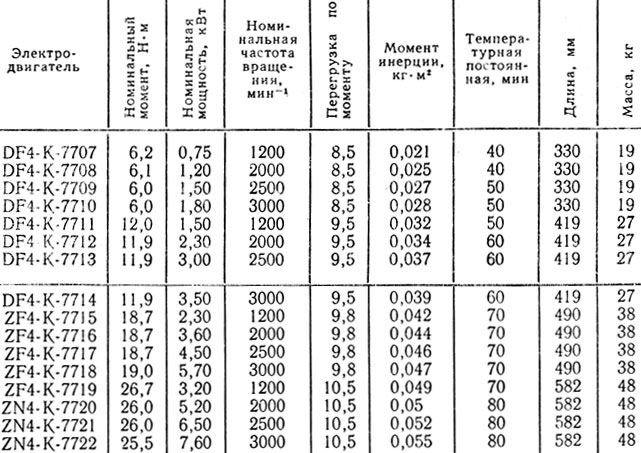
Таблица 29. Технические данные электродвигателей постоянного тока серии 56-80 (СССР)
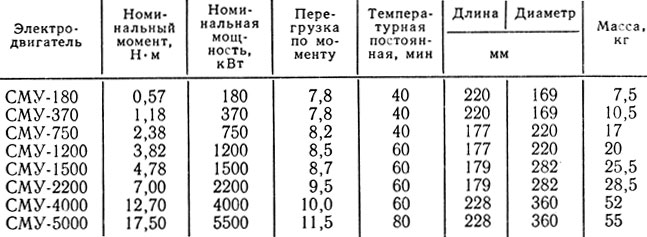
Таблица 30. Технические данные электродвигателей постоянного тока серии СМУ (СССР)
Примечание. Номинальная угловая скорость 3000 мин-1.
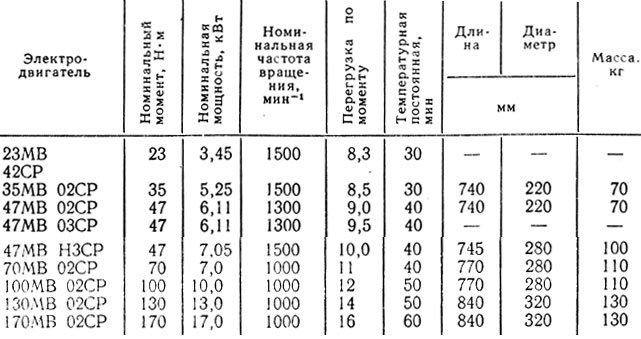
Таблица 31. Технические данные электродвигателей постоянного тока серии МВ (НРБ)
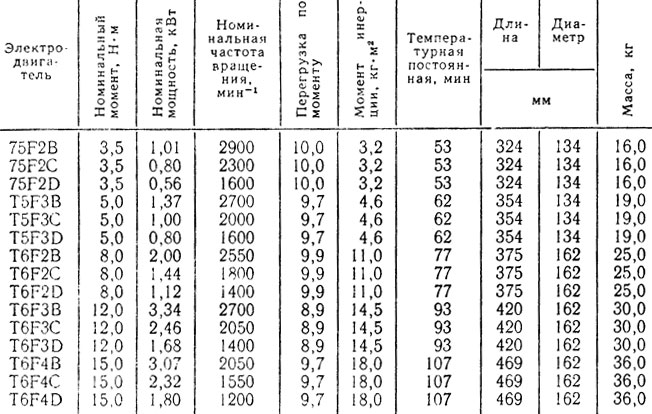
Таблица 32. Технические данные электродвигателей постоянного тока серии TF (Франция)
Гидропривод и аппаратура. Высокая энергоемкость, быстродействие, малая инерционность, относительно высокая жесткость статических нагрузочных характеристик (за счет малой сжимаемости рабочих жидкостей), возможность реализации автоматического управления и регулирования скорости исполнительных механизмов, простота конструкции, надежность и низкая стоимость обеспечивают широкое применение гидропривода в конструкциях ПР в большом диапазоне грузоподъемности (свыше 10 кг). К недостаткам гидропривода относятся возможность утечек и необходимость введения устройств для охлаждения рабочей жидкости.
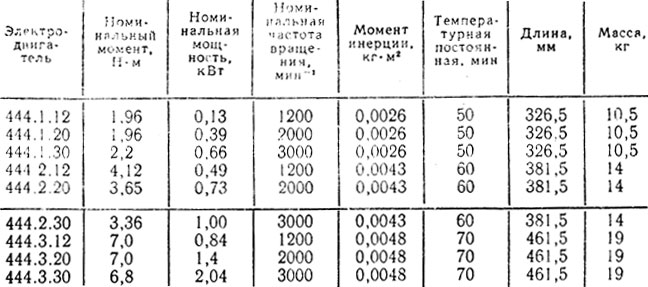
Таблица 33. Технические данные электродвигателей постоянного тока серии 444 (ФРГ)
Примечание. Диаметр 113 мм.
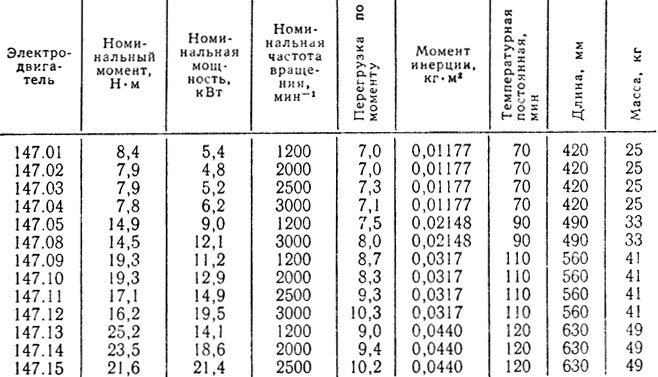
Таблица 34. Технические данные электродвигателей постоянного тока серии 147 (Италия)
Примечание. Диаметр 192 мм.
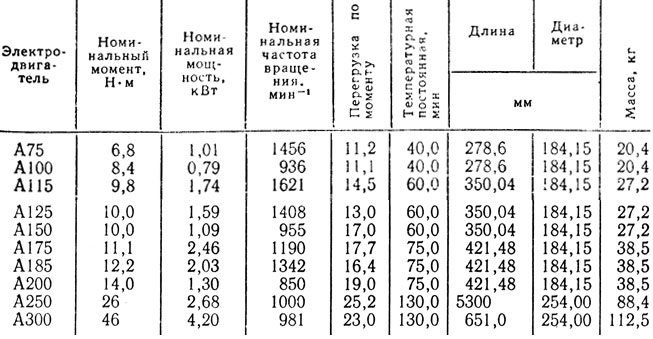
Таблица 35. Технические данные электродвигателей постоянного тока серии А (США)
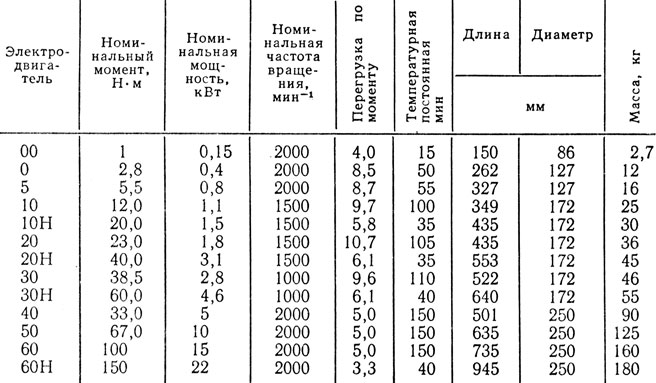
Таблица 36. Технические данные электродвигателей постоянного тока (Япония)
В гидроприводах цикловых ПР применяют следующие основные типы исполнительных гидродвигателей, которые могут сочетаться с различными конструкциями механических передач: линейные гидроцилиндры с поступательным движением штока, поворотные гидродвигатели с ограниченным углом поворота выходного вала, гидромоторы.
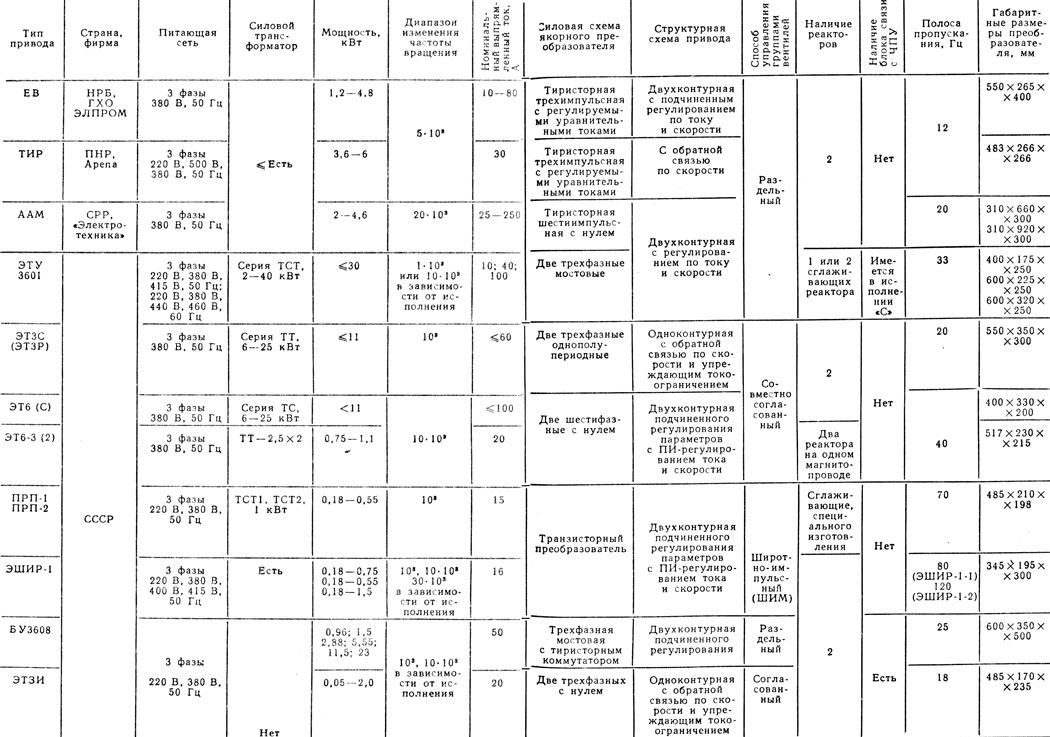
Таблица 37. Комплектные электроприводы
Продолжение таблицы 37
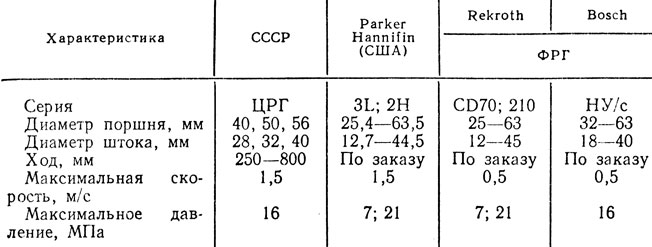
Таблица 38. Технические данные гидроцилиндров
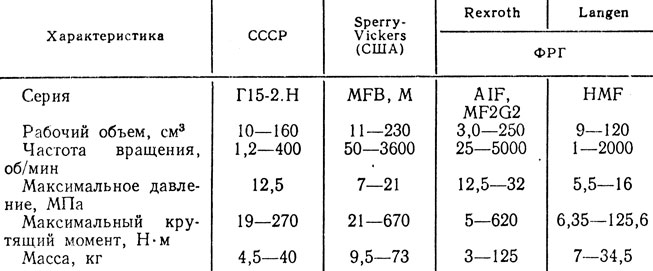
Таблица 39. Технические данные гидромоторов
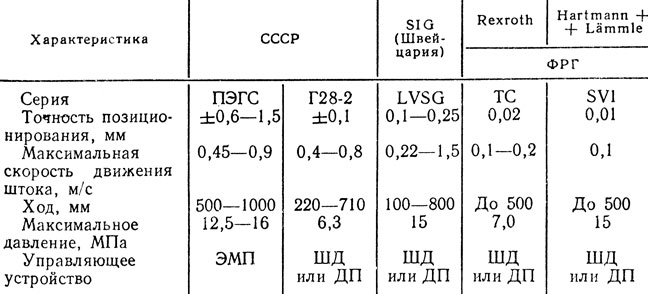
Таблица 40. Технические данные комплектных линейных электрогидравлических приводов
Примечание. ЭМП - электромагнитный преобразователь; ШД - шаговый электродвигатель; ДП - электродвигатель постоянного тока.
В табл. 38-42 приведены технические данные гидродвигателей и комплектных электрогидравлических приводов, выпускаемых в СССР и за рубежом. В табл. 43-50 приведены технические данные исполнительных гидродвигателей и комплектных гидроприводов, разработанных в СССР.
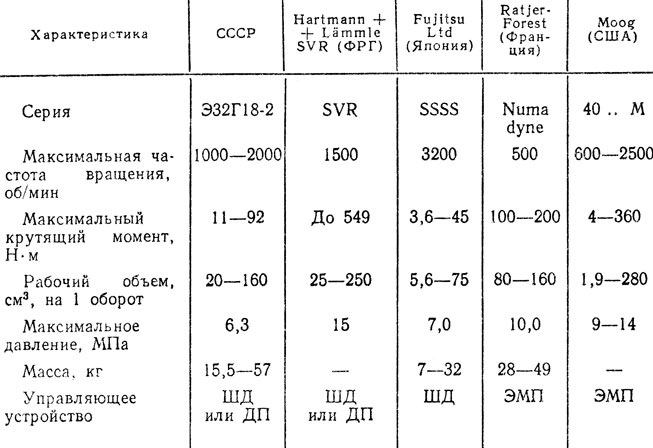
Таблица 41. Технические данные комплектных электрогидравлических приводов вращательного движения
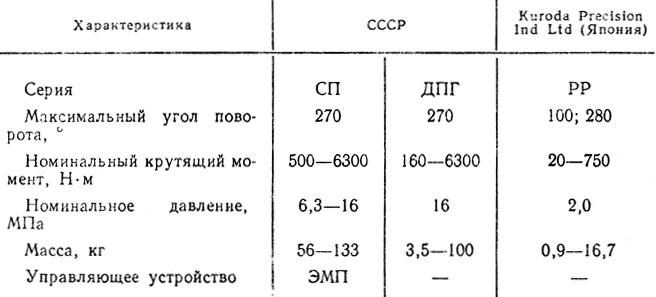
Таблица 42. Технические данные поворотных гидродвигателей и комплектных поворотных электрогидравлических приводов
В гидроцилиндрах ЦРГ и поворотных гидродвигателях ДПГ предусмотрена возможность регулирования режимов торможения в конце рабочего хода. Рабочая жидкость - минеральные масла вязкостью 12-250 мм2/с со степенью очистки не грубее 14-го класса по ГОСТ 17216-71. Температура масел 0-60°.
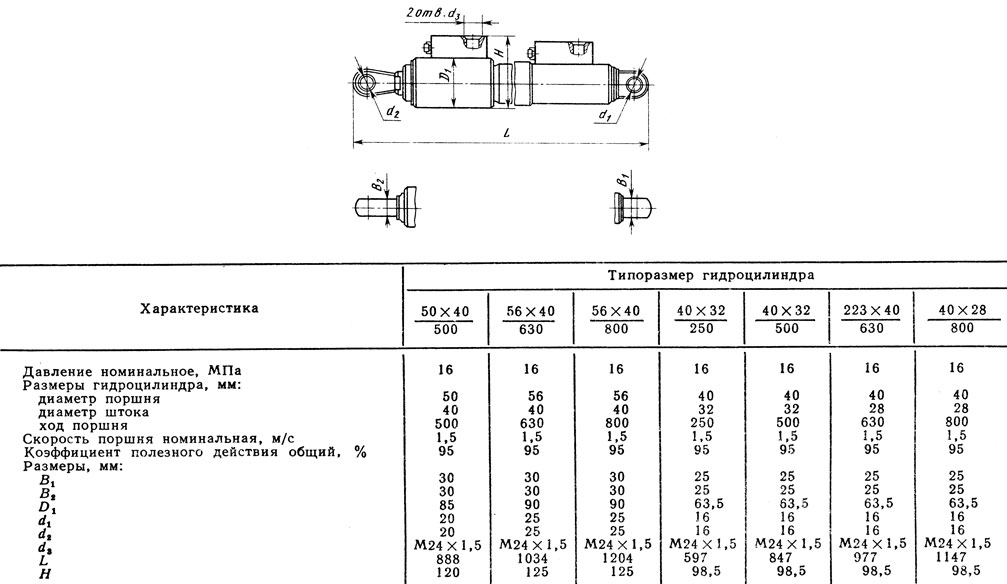
Таблица 43. Технические данные гидроцилиндров типа ЦРГ
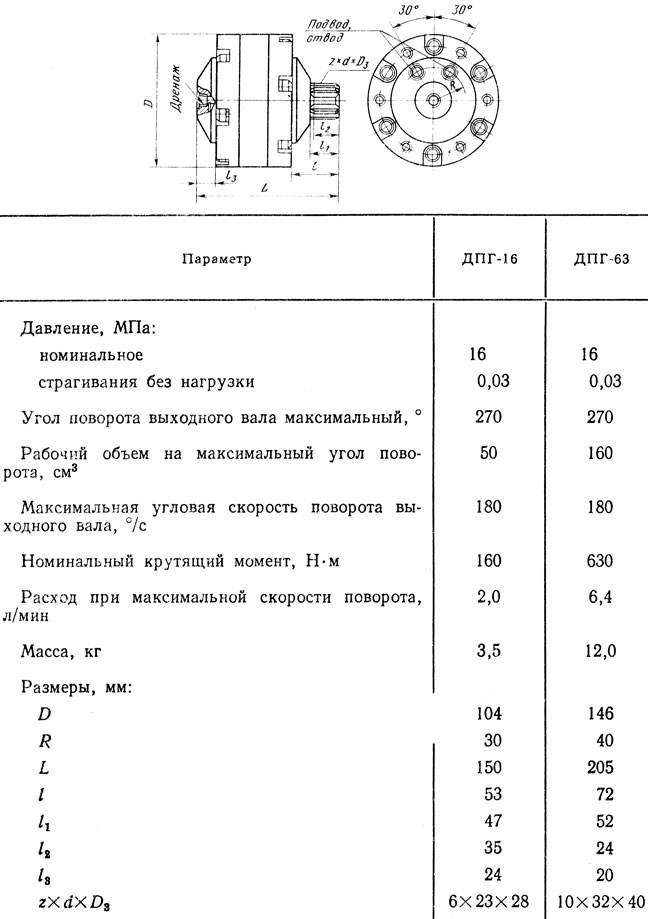
Таблица 44. Технические данные гидродвигателей
Примечание. Основное назначение - для осуществления поворотных движений в пределах максимального угла поворота двигателя.
Скорость перемещений исполнительных гидродвигателей регулируется дросселями. Для запирания полостей при выключении гидравлики применяют гидрозамки клапанного типа или блокирующие распределители с электро- или гидроуправлением.
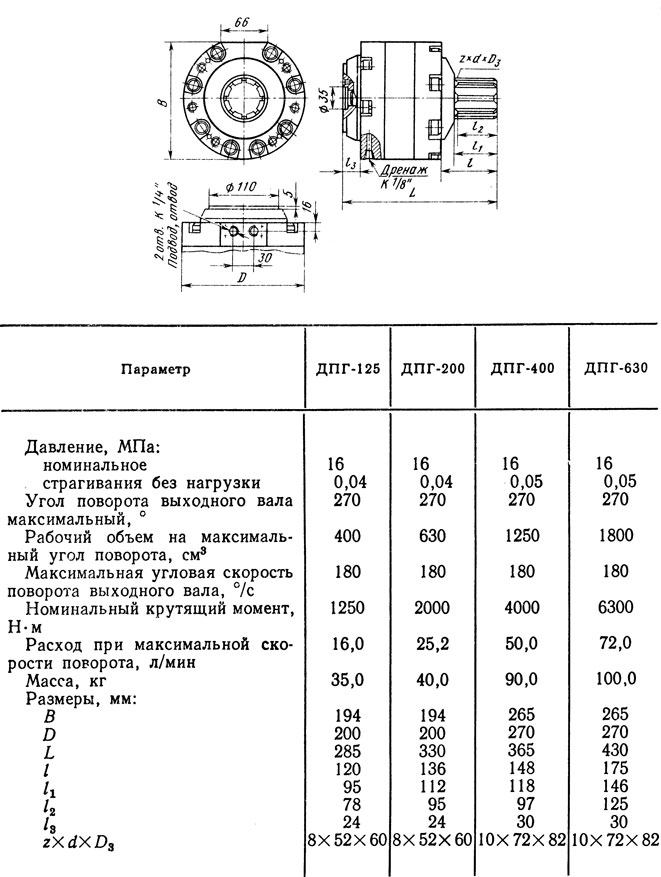
Таблица 45. Технические данные гидродвигателей
Примечание. Основное назначение - для осуществления поворотных движений в пределах максимального угла поворота двигателя.
В ПР с числовыми СПУ (позиционными и контурными) нашли применение два типа комплектных гидроприводов: электрогидравлические следящие приводы с линейными гидроцилиндрами (типа ПЭГС) и гидродвигателями (поворотные приводы типа СП), работающие по замкнутой схеме; электрогидравлические шаговые приводы вращения и линейные электрогидравлические шаговые приводы Г28-2. Электрогидравлические следящие приводы ПЭГС и СП комплектуют электрогидравлическими усилителями УЭГ-8 или УЭГ-85 и встроенными датчиками обратной связи по положению. Рабочая жидкость - минеральные масла вязкостью не более 40 мм2/с при температуре 10-60 °С.
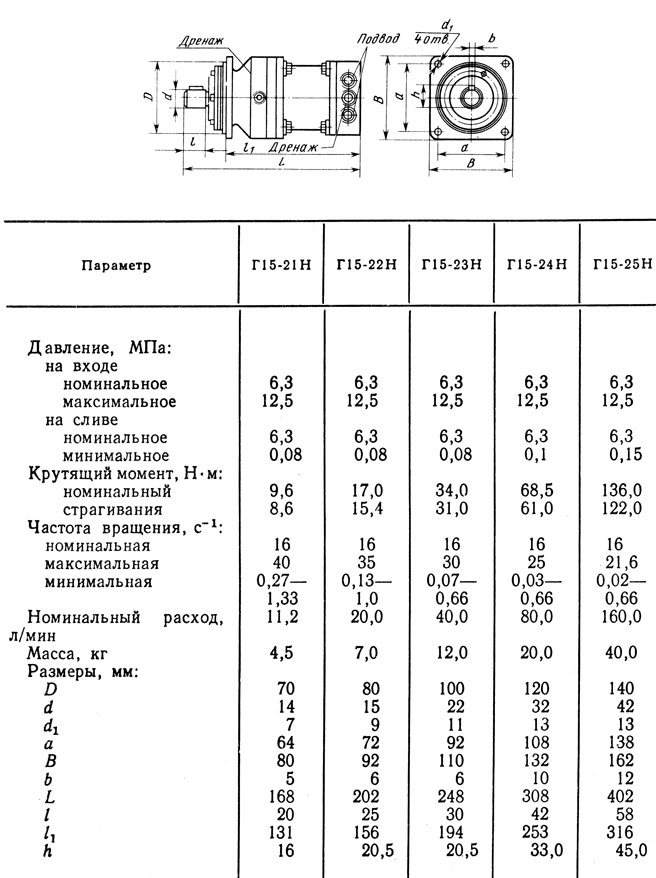
Таблица 46. Технические данные гидромотора
Примечание. Основное назначение - привод рабочих органов станков и роботов.
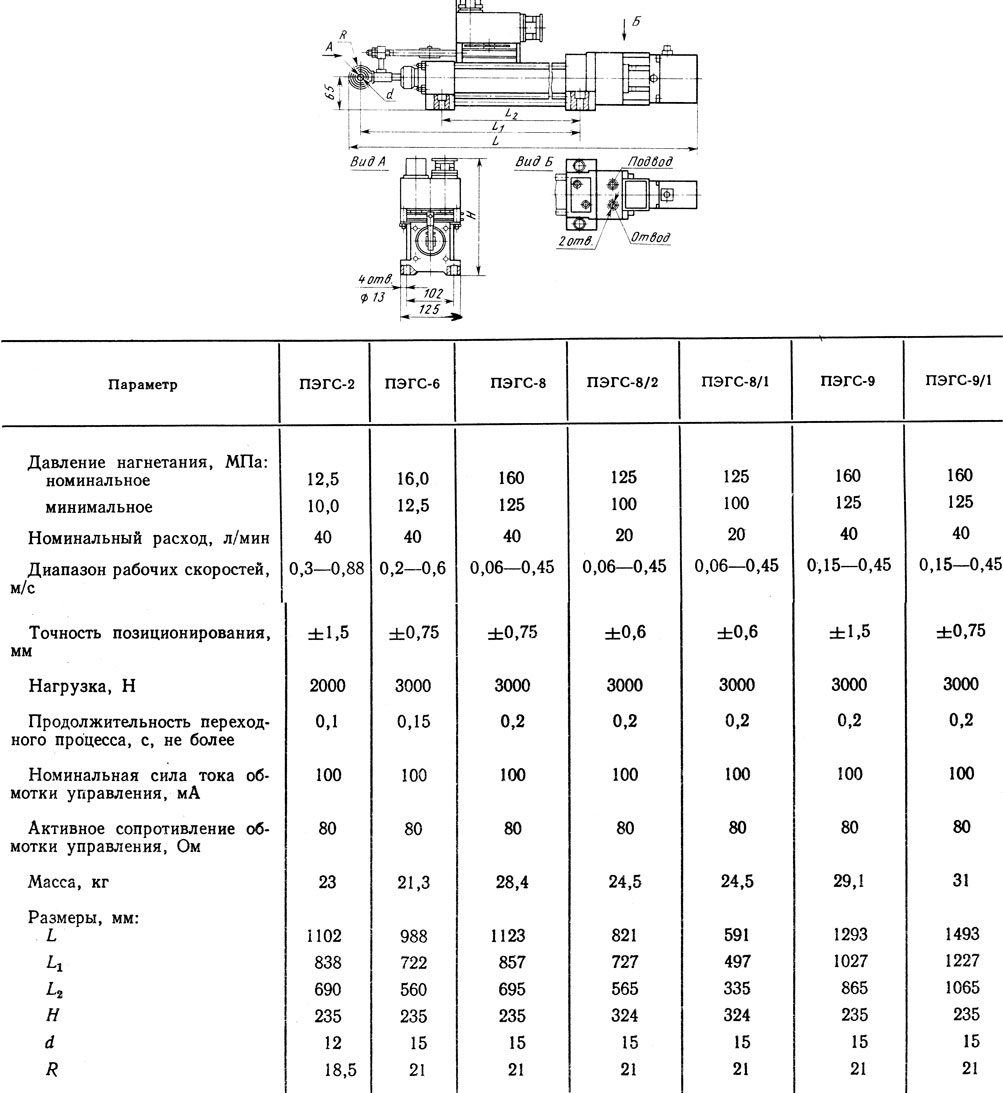
Таблица 47. Технические данные линейных приводов
Примечание.
- Основное назначение - осуществление возвратно-поступательных движений по программе, поступающей в виде электрических сигналов от задающего устройства.
- Приводы имеют встроенные датчики обратной связи по положению.
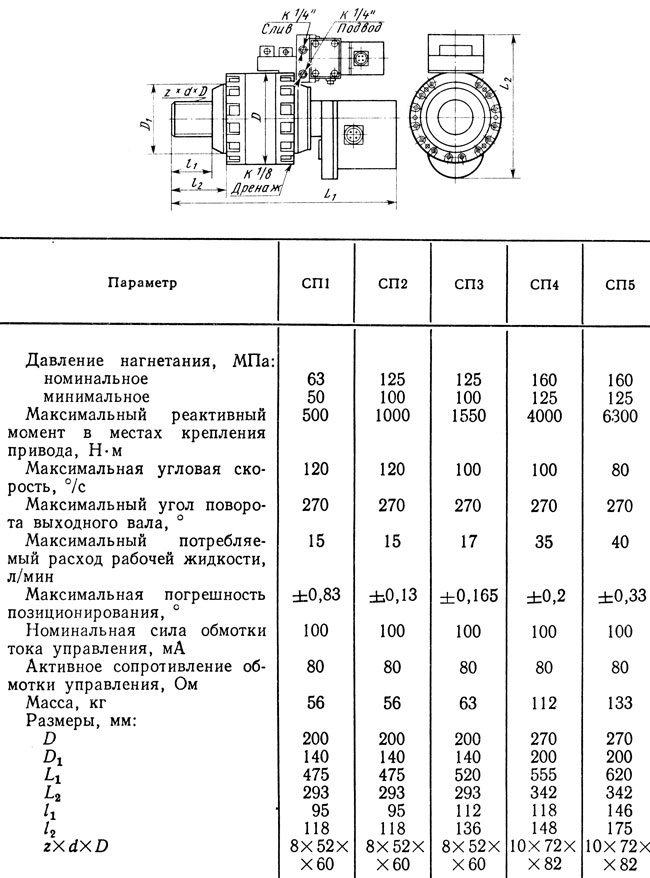
Таблица 48. Технические данные поворотных приводов
Примечание.
- Основное назначение - осуществление возвратно-поступательных движений по программе, поступающей в виде электрических сигналов от задающего устройства.
- Приводы имеют встроенные датчики обратной связи по положению.
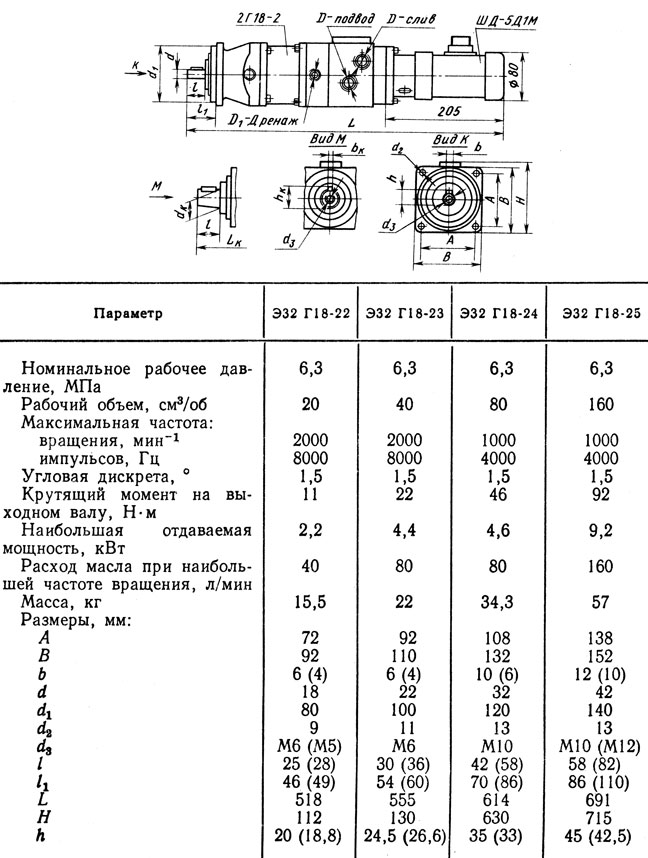
Таблица 49. Технические данные приводов поворотных шаговых
Примечание.
- В скобках указаны размеры приводов с конической шейкой выходного вала Э32 Г18-22К, Э3, Г18-23К, Э32 Г18-25К.
- Основное назначение - перемещение рабочих органов станков и роботов по программе, поступающей в виде электрических сигналов от задающего устройства на управляющий ШД.
- Управляющий шаговый двигатель ШД5-Д1М.
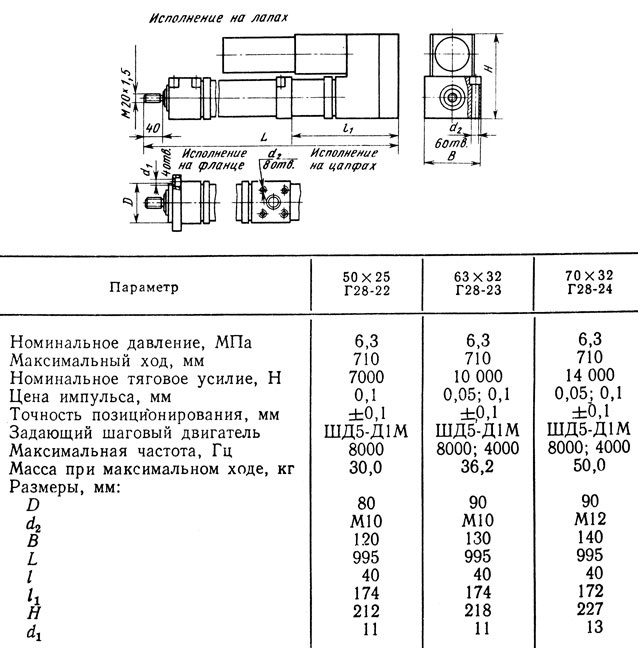
Таблица 50. Технические данные линейных шаговых приводов
Примечание.
- Ход: 220, 320, 400, 500, 630, 710.
- Основное назначение - осуществление линейных перемещений по программе, поступающей в виде электрических сигналов от задающего устройства на управляющий ШД. На приводах возможна установка датчиков положения штока.
Шаговые электрогидравлические приводы работают по разомкнутой схеме, из-за чего возникает опасность потери информации о положении выходного звена. Поэтому при их применении необходимо оснащать звенья ПР дополнительными датчиками положения. Линейные электрогидравлические приводы Г28-2 могут комплектоваться датчиками положения штока цилиндра. Электрогидравлические шаговые приводы вращения Э32 Г18-2 применяют для осуществления значительных (свыше 2-3 м) перемещений вспомогательных органов ПР в сочетании с винтовыми или реечными механическими передачами.
В гидроприводах ПР применяется широкая номенклатура распределительной и контрольно-регулирующей аппаратуры. Наибольшее распространение получила малогабаритная аппаратура с условным проходом до 6 мм. Питание гидросистем ПР - от насосных установок с непрерывным или ступенчатым изменением подачи рабочей жидкости. Широкое применение находят пневмогидравлические аккумуляторы с эластичным разделителем полостей и поршневые. В роботах с цикловым управлением тонкость фильтрации рабочей жидкости обычно 25 мкм, при применении комплектных электрогидравлических приводов - 10 мкм. Информация по применяемому в ПР гидрооборудованию имеется в специализированных каталогах этих изделий.
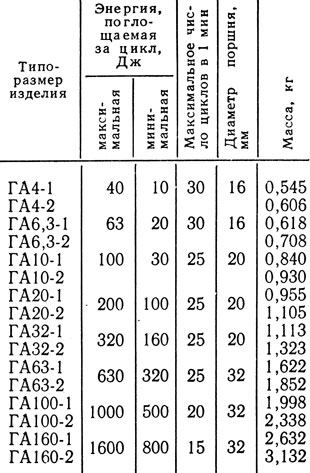
Таблица 51. Технические данные гидроамортизаторов ГА (СССР)
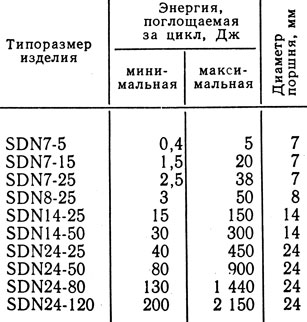
Таблица 52. Технические характеристики гидравлических амортизаторов фирмы Forkardt (ФРГ)
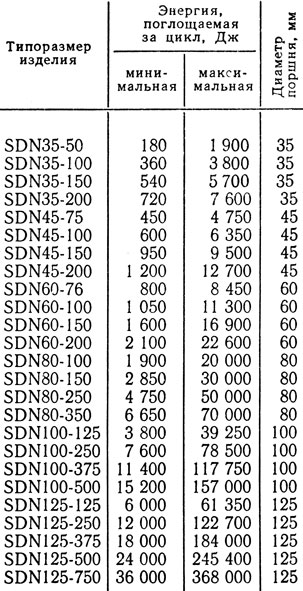
Продолжение таблицы 52
Пневматический привод получил широкое применение в конструкциях упрощенных ПР грузоподъемностью до 20 кг. Это обусловлено следующими свойствами: быстродействием, связанным с высокой скоростью срабатывания пневматических исполнительных механизмов; относительной простотой конструкции линейных пневмоцилиндров и поворотных пневмодвигателей, способных реализовать требуемые движения без использования сложных механических передач; сравнительной легкостью реализации принципов агрегатно-модульного построения конструкций ПР в широком диапазоне компоновок механических систем; надежностью работы в широком диапазоне температур. Преимуществами их являются также простота в эксплуатации, пожаро- и взрывобезопасность, возможность применения простых устройств для защиты от перегрузок, виброустойчивость, меньшая стоимость по сравнению с другими видами приводов, а также возможность комплектации струйными системами управления, использующими тот же вид энергоносителя. К недостаткам пневмопривода следует отнести низкую удельную мощность, что обусловлено малым рабочим давлением (не более 0,6 МПа), а также низкую жесткость, связанную со сжимаемостью воздуха. Низкая жесткость привода в сочетании с системой управления разомкнутого типа создает трудности при наладке и программировании. Из-за малой жесткости привода также трудно обеспечить чисто пневматическими средствами мягкую безударную остановку движущихся масс при подходе пневмоцилиндра к неподвижному упору, что вызывает необходимость применения гидроамортизаторов. В табл: 51-54 приведены технические данные гидроамортизаторов, выпускаемых в СССР, Австрии и ФРГ.
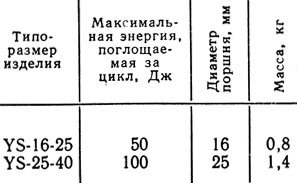
Таблица 53. Технические характеристики гидравлических амортизаторов фирмы Festo (Австрия)
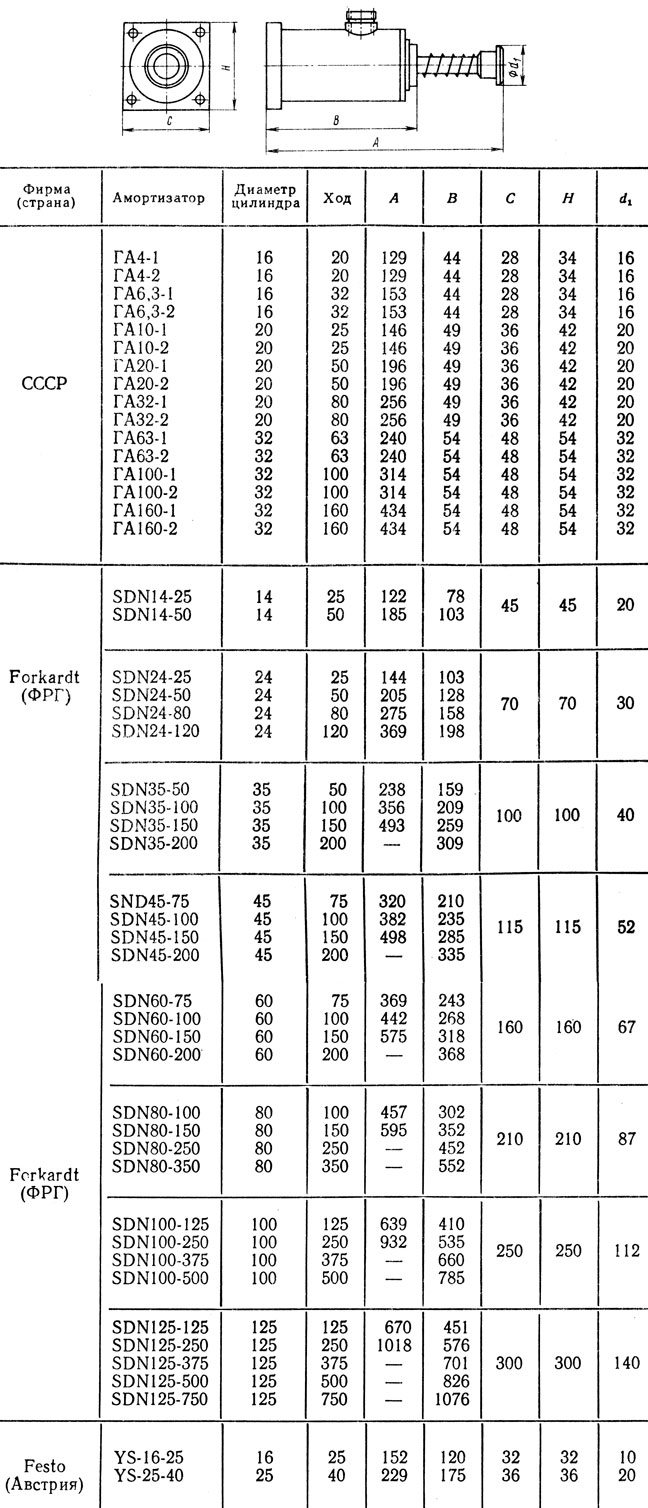
Таблица 54. Основные размеры (мм) гидроамортизаторов
В состав пневмопривода входят пневматические исполнительные механизмы (пневмоцилиндры одностороннего и двустороннего действия, неполноповоротные пневмодвигатели разных типов, пневмомоторы, мембранные камеры и т. п.); распределительная пневмоаппаратура - главные и вспомогательные распределители (двух- и реже трех-позиционные, различные пневмоклапаны и т. п.); контрольно-регулирующая пневмоаппаратура (пневмодроссели, пневмоклапаны редукционные, индикаторы давления, реле давления и др.); аппаратура для подготовки воздуха с фильтрами с целью отделения пыли, влаги с маслораспылителями и другими элементами.
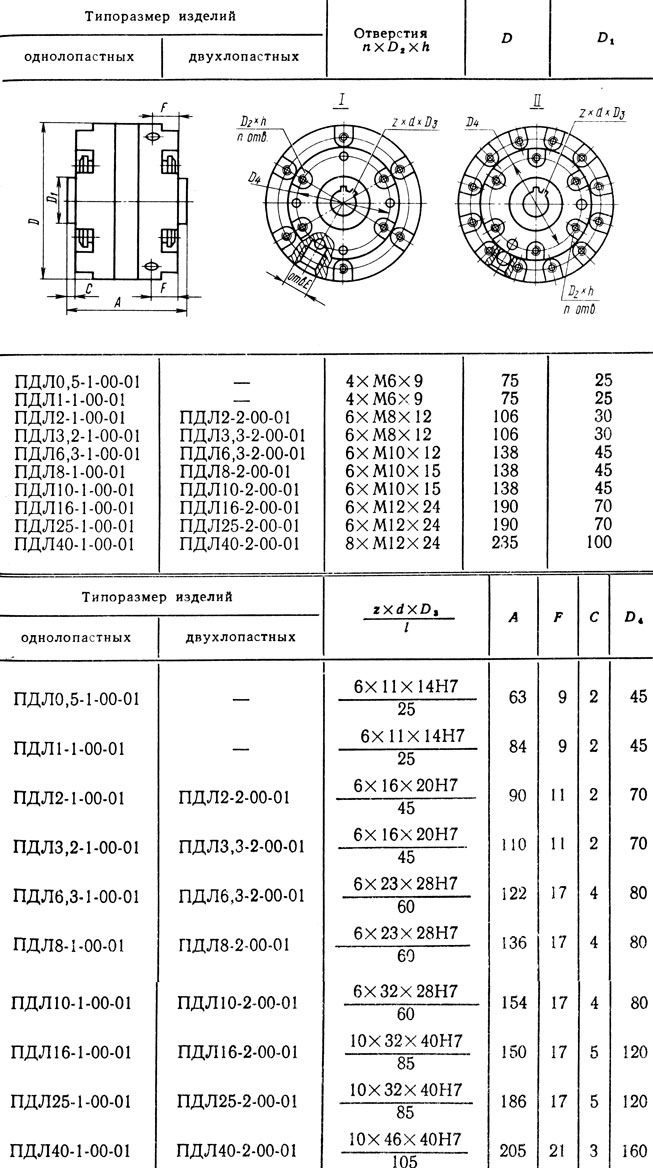
Таблица 55. Основные размеры (мм) поворотных пневмодвигателей ПДЛ
Примечание. Двигатели ПДЛ0,5 и ПДЛ1 выпускаются в исполнении I, остальные типы - в исполнении II.
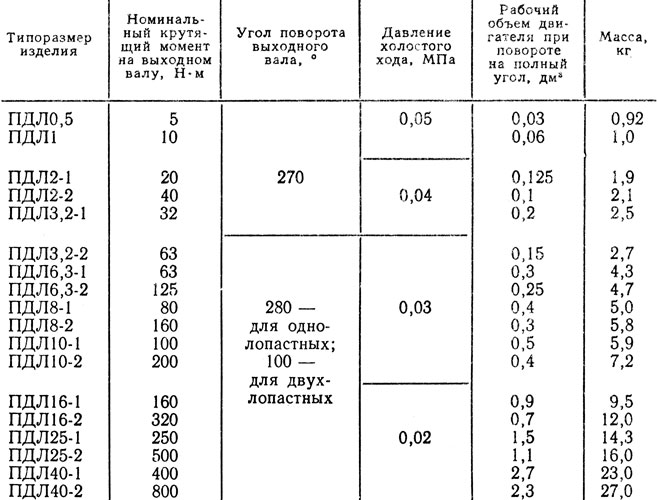
Таблица 56. Технические данные поворотных пневмодвигателей ПДЛ
Примечания.
- Номинальное давление воздуха 1МПа.
- Угловая скорость выходного вала 180 °/с.
- Допускается падение давления при ρНОМ через уплотнения подвижных и неподвижных соединений не более 0,02 МПа за 30 с.
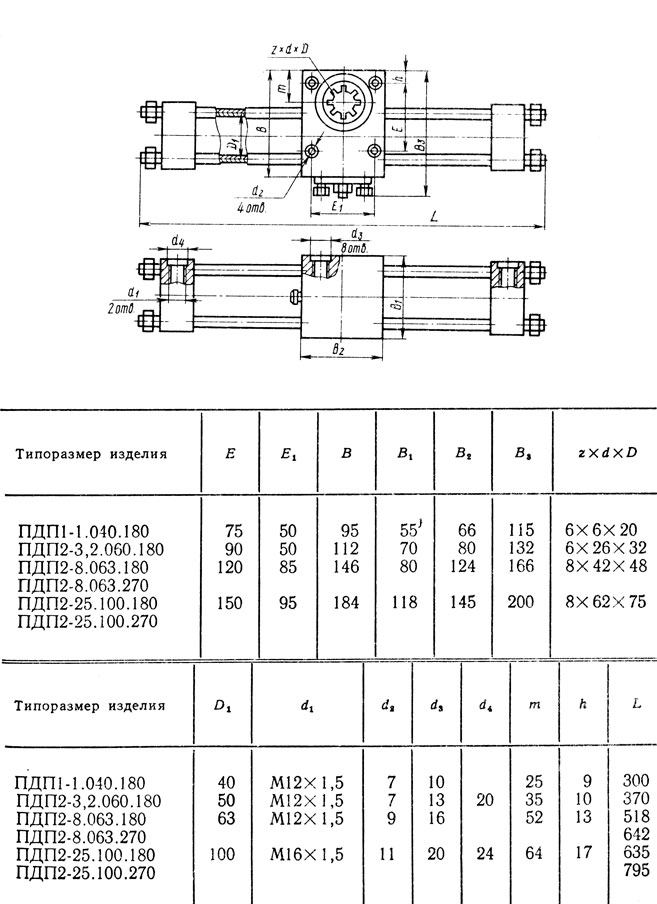
Таблица 57. Основные размеры (мм) поворотных пневмодвигателей ПДП1 и ПДП2
Примечание. Исполнение ПДП2 имеет торможение в конце хода.
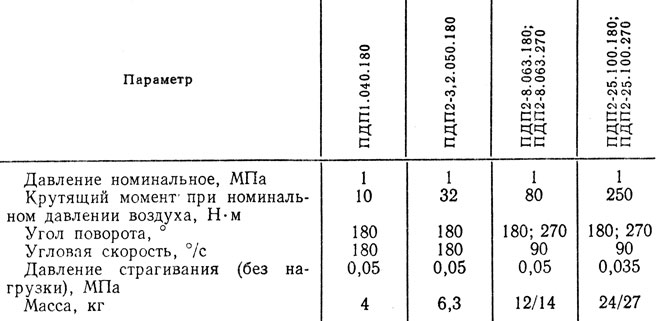
Таблица 58. Технические характеристики поворотных пневмодвигателей ПДП1 и ПДП2
Примечание. Падение давления при 1МПа через уплотнения подвижных и неподвижных соединений за время 5 мин при полностью перекрытым питании не более 0,02 МПа.
В табл. 55-60 приведены технические данные лопастных (ЦДЛ) и поршневых (ПДП) пневмодвигателей, предназначенных для осуществления не-полноповоротных вращательных движений механизмов ПР. Поршневые пневмодвигатели выпускают в одинарном и сдвоенном исполнениях. В качестве рабочей среды применяют сжатый воздух температурой 0-60 °С и степенью очистки не ниже 10-го класса загрязненности (ГОСТ 17433-80). Воздух должен быть насыщен маслом (2-4 капли на 1 м3 свободного воздуха).
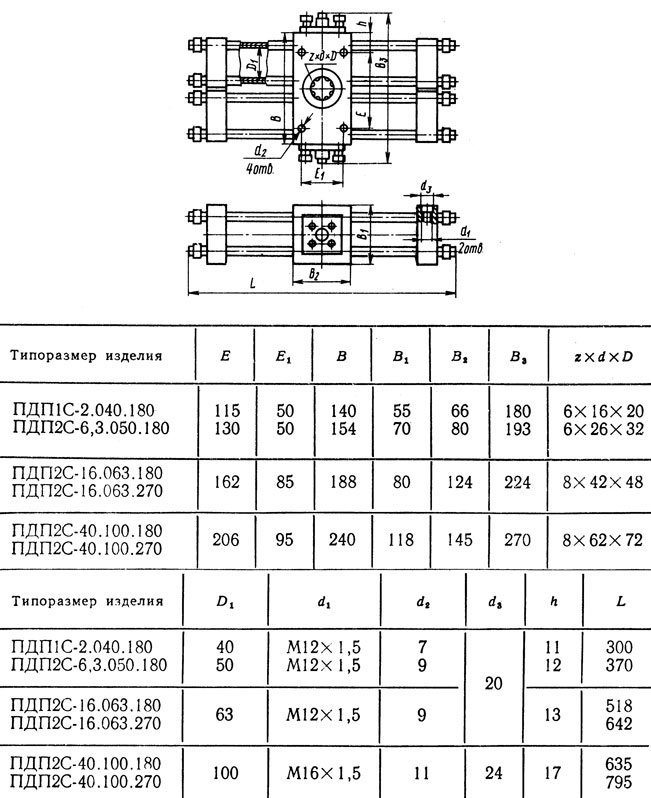
Таблица 59. Основные размеры (мм) поворотных пневмодвигателей моделей ПДП1С и ПДП2С
Примечание. Исполнение ПДП2С имеет торможение в конце хода.
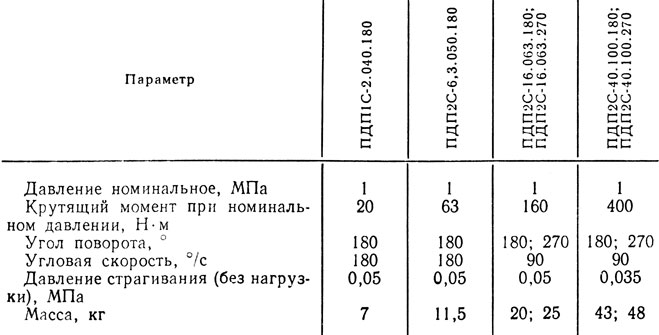
Таблица 60. Технические характеристики поворотных пневмодвигателей АДП1С и ПДП2С
Примечание. Падение давления при 1 МПа через уплотнения подвижных и неподвижных соединений за время 5 мин при полностью перекрытом питании не более 0,02 МПа.
В конструкциях ПР используют специальные или стандартные пневмоцилиндры по ГОСТ 15608-81.
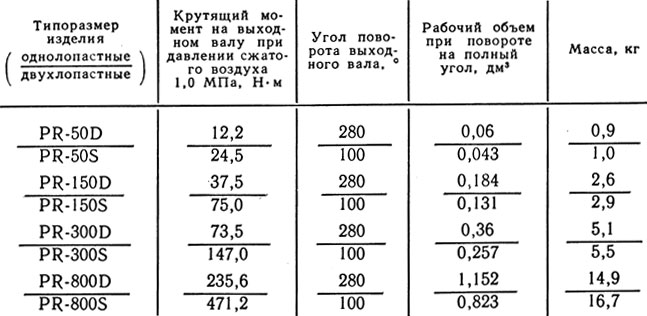
Таблица 62. Технические характеристики поворотных пневмодвигателей фирмы Kuroda (Япония), работающих на давлении сжатого воздуха 0,3-2,0 МПа
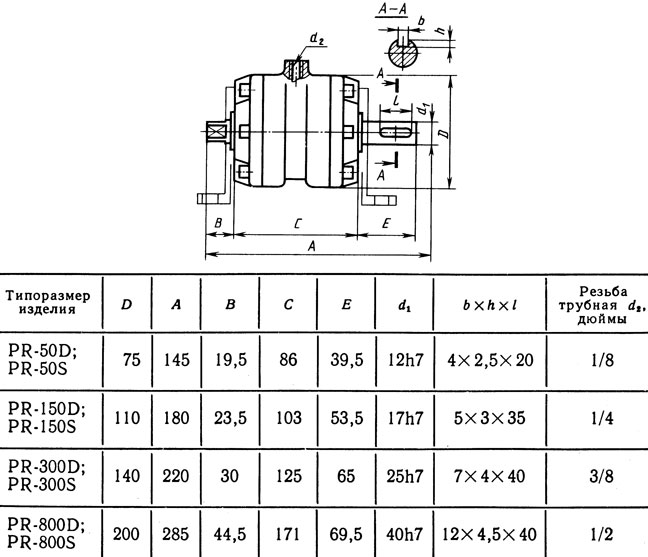
Таблица 62. Основные размеры (мм) поворотных пневмодвигателей фирмы Kuroda (Япония)
В табл. 61 и 62 приведены основные технические данные поворотных пневмодвигателей японской фирмы Kuroda, работающих на давлении сжатого воздуха 0,3-2,0 МПа.
Наряду с устройствами, предназначенными специально для ПР, в приводах применяют пневматическую аппаратуру и пневмооборудование общего назначения, серийно выпускаемые специализированными заводами.
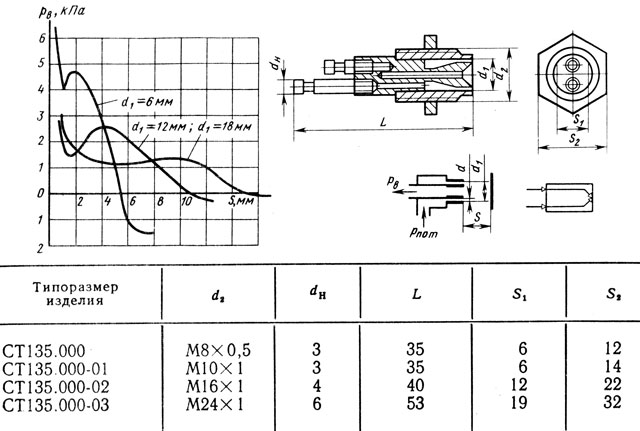
Таблица 63. Основные размеры (мм) струйных путевых выключателей модели СТ135
Пневматические ПР часто комплектуют струйными логическими элементами. Для ввода информации о перемещении исполнительных механизмов ПР часто используют струйные путевые выключатели СТ135, технические данные которых приведены в табл. 63, 64.
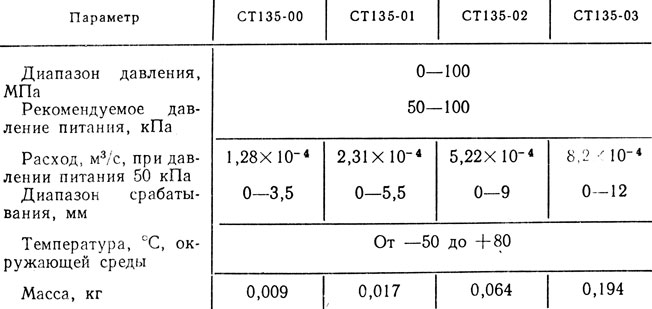
Таблица 64. Технические данные струйных путевых выключателей модели СТ135
Примечание. Пропускаемая частота 20 Гц при линии связи длиной 5 м.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'