4.3. Системы адаптивного программного управления и диагностики станков
Системы адаптивного программного управления (АПУ) станками сложнее обычных систем ЧПУ, поэтому для их программно-аппаратной реализации обычно используются DNC-системы на базе мини-ЭВМ с развитым программируемым интерфейсом. В ряде случаев оказывается возможным реализовать адаптивное управление и на базе мультимикропроцессорных систем ЧПУ типа CNC посредством введения соответствующих элементов адаптации. Расширение функциональных и адаптационных возможностей систем ЧПУ достигается посредством их простого усовершенствования за счет наращивания программного обеспечения или подключения дополнительных микропроцессоров, реализующих алгоритмы адаптации и искусственного интеллекта. При этом станок может работать в основном в обычном режиме ЧПУ, а переход к АПУ производится автоматически в тот момент, когда в этом возникает необходимость.
Рассмотрим особенности современных микропроцессорных систем ЧПУ, допускающих реализацию элементов адаптации. Эти CNC-системы, серийно выпускаемые рядом зарубежных фирм и отечественных предприятий, строятся на базе нескольких однотипных микропроцессоров или микроЭВМ, специализирующихся на выполнении определенных функций обработки информации и управления в реальном времени. Вычислительные возможности таких мультимикропроцессорных систем сравнимы с возможностями современных мини-ЭВМ. Однако они обладают еще тем преимуществом, что допускают естественное распараллеливание вычислительных процессов, что особенно важно для реализации адаптивного управления в реальном времени.
Основными требованиями, предъявляемыми к микроЭВМ и микропроцессорам систем АПУ, являются высокое быстродействие (порядка нескольких миллионов операций в секунду), достаточная длина слова (чаще всего это 8- или 16-разрядные слова), развитая система команд, большой объем памяти и разнообразный интерфейс.
Важную роль в микропроцессорных системах ЧПУ и АПУ играют запоминающие устройства. Обычно используются три типа таких устройств, реализуемых на интегральных схемах с большой степенью интеграции:
- оперативное запоминающее устройство (ОЗУ), обеспечивающее считывание и запись информации в режиме реального времени;
- постоянное запоминающее устройство (ПЗУ), допускающее только считывание информации и обеспечивающее хранение информации при отключении электропитания;
- перепрограммируемое постоянное запоминающее устройство (ППЗУ), допускающее стирание информации и перепрограммирование.
ОЗУ служит для временного хранения информации, необходимой для формирования управляющих сигналов. В современных микропроцессорных системах ЧПУ ОЗУ часто используется для записи и считывания управляющей программы и различных видов коррекции ее параметров (скорости главного привода, рабочих подач, длины инструмента и т. п.). При отключении электропитания содержимое ОЗУ стирается.
ПЗУ используется для хранения сервисных и функциональных программных модулей (технологические циклы обработки, алгоритмы управления), а также для хранения постоянных данных (параметры станка, ограничения и т. п.).
ППЗУ служит для хранения быстро меняющейся информации и дополнительных программных модулей (например, модулей адаптации).
Типичным примером использования микропроцессоров, ОЗУ и ПЗУ в системе АПУ может служить система фирмы "Актрон" (Aktron, США). Эта система реализована на трех одинаковых 16-разрядных микроЭВМ, каждая из которых ориентирована на выполнение определенных функций управления. Первая микроЭВМ служит для расчета (интерполяции) программ обработки и их коррекции, вторая - для адаптивного управления приводами станка, третья - для управления интерфейсом ввода-вывода. Все алгоритмы обработки информации и управления реализованы программно и хранятся в ПЗУ. Для хранения типовых циклов обработки, коррекций и постоянных параметров используется общая для всех процессоров память данных, выполненная на базе ОЗУ и ПЗУ.
Таким образом, мультимикропроцессорные системы АПУ обеспечивают возможность программно-аппаратной реализации весьма сложных и совершенных алгоритмов управления станками, включая и алгоритмы адаптации. Программные модули, реализующие эти алгоритмы, целесообразно хранить в энергонезависимом ПЗУ.
Важную роль при организации АПУ играют диалоговые средства общения оператора с CNC-системой, обеспечивающие возможность редактирования управляющих программ, введения коррекций, изменения параметров и формирования типовых технологических циклов обработки. По мере отладки управляющих программ их вводят в ОЗУ или ПЗУ.
Автоматизация программирования станков является одним из первоочередных направлений развития систем АПУ. Другим важным направлением, связанным с увеличением надежности станков, является создание и совершенствование средств диагностики неисправностей. Для улучшения качества обработки в CNC-системах нужно шире использовать такие средства адаптации, как коррекцию программ в зависимости от износа инструмента, компенсацию усилий на шпинделе, самонастройку управляющих воздействий и т. п.
Технические и функциональные параметры современных микропроцессорных систем ЧПУ типа CNC, используемых также в качестве систем АПУ (при введении в них соответствующих элементов адаптации) для фрезерных станков и обрабатывающих центров, приведены в табл. 4.1.
Резюмируя вышеизложенное, можно утверждать, что мини- ЭВМ открыли новый этап в построении систем АПУ и диагностики станков. Они позволяют существенно расширить функциональные возможности DNC-систем (за счет соответствующего наращивания программного обеспечения) при одновременном сокращении и упрощении их аппаратной части. Благодаря гибкости и адаптивности эти системы обеспечивают возможность быстрого перехода с одной программы обработки на другую или с одного станка на другой. Автоматическая диагностика неисправностей в сочетании с упрощением аппаратной части приводит к сокращению простоев и увеличению надежности станков с АПУ от мини-ЭВМ. Все это говорит о целесообразности применения таких станков в составе адаптивных РТК.
Однако несмотря на отмеченные преимущества систем АПУ на базе мини-ЭВМ важную роль для адаптивного управления станками играли и продолжают играть мультимикропроцессорные CNC-системы. Они проще, дешевле и не требуют от оператора знаний языков программирования. Практика показывает, что в ряде случаев мультимикропроцессорные системы АПУ станками оказываются достаточно эффективными. Поэтому можно ожидать, что в ближайшем будущем они сохранят свои позиции и будут применяться в адаптивных РТК и ГАП вместе с более перспективными системами АПУ типа DNC.
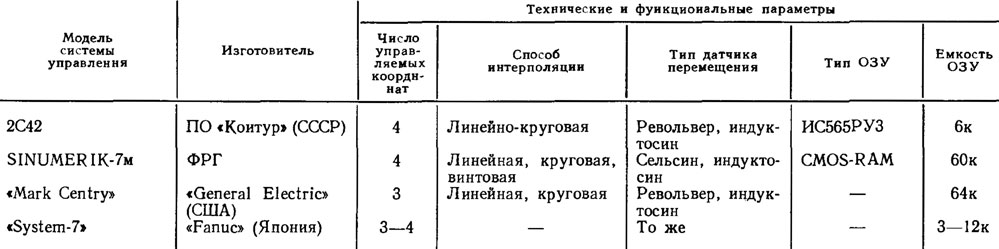
Таблица 4.1
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'