Глава 6. Адаптивные транспортные средства
6.1. Задачи и средства автоматической транспортировки грузов
Автоматические транспортные средства в ГАП служат для организации и быстрой модификации грузопотоков из заготовок, деталей, оснастки, инструментов и готовых изделий в соответствии с заданной последовательностью технологических операций. Как известно [24, 33], общее время, затрачиваемое на транспортировку и промежуточное складирование грузов, достигает в ряде случаев 90 % от производственного цикла. Отсюда ясно, что важным резервом повышения производительности ГАП является сокращение времени на транспортировку грузов.
При проектировании ГАП важную роль играет выбор и оптимизация транспортных связей и грузопотоков. Транспортируемые грузы принято классифицировать по физико-технологическим признакам: по массе (тяжелые, средние, легкие и т. п.), по форме (тела вращения, корпусные детали и т. п.), по способу загрузки (в таре, навалом, ориентированные, кассетированные и т. п.), по виду и свойствам материалов и т. д. С учетом этих признаков выбираются наиболее адекватные грузозахватные и транспортные средства, обеспечивающие требуемые перемещения грузов. В качестве грузозахватных устройств обычно используются подъемные, поворотные или выдвижные столы, ленточные конвейеры, рольганги и бортовые манипуляторы.
Гибкость транспортных средств обеспечивается в основном возможностью изменения транспортных маршрутов и скоростей перемещения грузов. При этом маршруты движения задаются либо путем предварительной прокладки трассы, либо программируются с помощью ЭВМ. Транспортировка грузов по заданному маршруту и регулирование скорости осуществляются системой автоматического управления.
Одним из наиболее эффективных средств гибкой организации и оптимизации грузопотоков служат транспортные роботы. По своим функциональным возможностям они занимают промежуточное положение между непрерывными транспортными конвейерами и электрокарами или автопогрузчиками, управляемыми людьми. В отличие от конвейеров транспортные роботы обладают большей гибкостью, а в отличие от электрокаров или автопогрузчиков - большим уровнем автономности за счет автоматизации вождения. Среди других достоинств транспортных роботов от" метим следующие.
Во-первых, прокладка и изменение трасс движения, диктуемых гибкой технологией производства, осуществляется достаточно просто. При этом трассы, прокладываемые для робота, могут в случае необходимости использоваться и для электрокаров. Во-вторых, транспортные роботы не являются стационарным оборудованием и не требуют особого рабочего места. Для увеличения коэффициента эффективного использования производственных площадей ширина коридора вдоль трассы должна выбираться минимальной с учетом габаритных размеров робота. В-третьих, при одной и той же трассировке ГАП его производительность можно изменять путем регулирования числа запускаемых в эксплуатацию роботов и соответствующей корректировки расписания их работы. В-четвертых, транспортные роботы, получающие питание от бортовых аккумуляторных батарей, экономичнее, чем конвейеры непрерывного действия. Кроме того, они более удобны при эксплуатации и ремонте и не загрязняют окружающую среду. Наконец, в-пятых, транспортные роботы имеют большой ресурс и снабжаются надежной системой безопасности, включающей предохранительные бамперы, датчики ближней локации или даже устройство распознавания препятствий, благодаря чему они практически безотказны и безопасны.
Транспортный робот представляет собой самоходную машину с автоматическим управлением. В качестве двигательной системы робота обычно выступает колесное или гусеничное шасси вместе со встроенными тяговыми и рулевыми приводами. Информационная система робота служит в основном для определения навигационных характеристик, т. е. местоположения и ориентации робота в рабочей зоне, а также для обеспечения взаимодействия робота с оборудованием ГАП. Система управления, используя сигналы обратной связи о фактическом положении и ориентации робота, вырабатывает такие управляющие воздействия на тяговые и рулевые приводы, при обработке которых робот движется по заданной трассе с требуемой скоростью.
Главная трудность при организации автоматического вождения робота заключается в синтезе закона управления, обеспечивающего выполнение заданной последовательности транспортных операций. В данном случае под законом управления подразумевается алгоритм формирования сигналов, управляющих работой тяговых и рулевых приводов на основе информации о требуемой программе (или трассе) движения и о текущих навигационных характеристиках робота.
Закон управления существенно зависит от того, в каком виде задается программа движения. В простейшем случае эта программа задается в форме постоянной трассы, по которой надлежит двигаться роботу. В условиях ГАП эта трасса зачастую представляет собой токопроводящий кабель, проложенный под полом цеха, или траекторию на полу, начерченную специальной краской.
Более гибкой формой задания программы движения является ее аналитическое представление в виде желаемого закона изменения во времени центра масс робота или в более общем случае вектора скорости движения центра масс. Этот закон, формируемый и хранящийся в системе управления, будем называть программной траекторией.
Проблема автоматического управления роботом по постоянной трассе в настоящее время технически решена. Теоретической основой решения являются принципы самонаведения робота на трассу. Для реализации этих принципов используются различные датчики и средства наведения. Транспортные роботы, в информационно-управляющей системе которых применяются указанные средства, будем называть роботами с самонаведением на трассу.
Наибольшее распространение в транспортных роботах, используемых в ГАП, получили индукционные (электромагнитные)средства наведения, В этом случае трасса задается электромагнитным полем, создаваемым .переменным низкочастотным электрическим током, который протекает по кабелю, проложенному под полом. На борту робота устанавливаются приемные катушки, сигналы с которых характеризуют изменения наведенного кабелем электромагнитного поля. Эти сигналы, пропорциональные отклонению робота от трассы, усиливаются и используются для управления сервоприводом, поворачивающим колеса (или ведущие звездочки) таким образом, чтобы скомпенсировать возникшее отклонение.
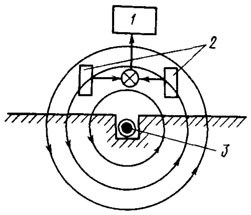
Рис. 6.1. Принцип действия индукционной системы наведения: 1 - бортовая система управления; 2 - приемные катушкн; 3 - кабель наведения
Принцип действия индукционной системы наведения транспортного робота иллюстрируется схемой, представленной на рис. 6.1.
Важно отметить, что коэффициенты усиления в каналах обратной связи зависят от ряда факторов и, в частности, от скорости движения робота по трассе. Поэтому для обеспечения устойчивой отработки' программного движения робота целесообразно изменять коэффициенты усиления в системе сервоуправления в зависимости от изменения этих факторов (например, при изменении скорости движения), т. е. возникает необходимость в самонастройке коэффициентов усиления.
Автоматическое управление роботом с помощью индукционных средств наведения на токопроводящий кабель имеет ряд достоинств. Среди них отметим следующие: бесконтактную связь между заданной трассой и роботом; возможность точного отслеживания сложных криволинейных трасс; простоту системы индукционного наведения и управления.
Индукционный принцип широко используется не только для наведения робота на заданную трассу, но и для определения его положения на трассе. Последнее особенно важно с точки зрения предотвращения столкновений роботов.
Для идентификации положения робота на трассе можно использовать витки проводов, уложенные под трассой. Робот, проходя над таким витком, уменьшает его индуктивность. Этот факт соответствующим образом регистрируется.
Таким образом, индукционные средства наведения обеспечивают возможность автоматического управления движением робота на трассе с регистрацией его текущего положения.
Для манипулирования, установки и фиксации грузов транспортные роботы снабжаются соответствующими устройствами и приспособлениями. К ним относятся бортовой манипулятор, подъемный стол, роликовый или цепной конвейер, вилочный захват и т. п. Эти устройства представляют собой своеобразный "механический интерфейс", обеспечивающий возможность сопряжения и взаимодействие робота с обслуживаемым оборудованием ГАП (РТК, склады, конвейеры, устройства смены палет и т. п.) в процессе обработки грузов.
В условиях ГАП первостепенное значение приобретают вопросы обеспечения безопасности движения транспортных роботов. Это связано с тем, что роботы в результате столкновения могут повредить или вывести из строя технологическое оборудование. При этом повреждение оборудования может оказаться более нежелательным, чем повреждение транспортного робота. Дело в том, что стоимость оборудования зачастую значительно превосходит стоимость робота, а любой простой, вызванный выходом из строя технологического оборудования, может привести к значительным экономическим потерям. Если транспортный робот в случае его поломки можно оперативно заменить другим роботом или автокаром, то дорогостоящее оборудование, как правило, нельзя, и возникает необходимость в его ремонте и наладке.
Для обеспечения безопасности движения транспортного робота применяются различные средства. Например, на шасси робота часто устанавливают бампер с контактными датчиками. При соприкосновении бампера с препятствием автоматически включается система торможения. Благодаря этому робот останавливается, не достигнув препятствия. Если же контактные датчики бампера откажут, то сработает другой, дублирующий бампер, который и обеспечит остановку робота.
Значительную потенциальную опасность представляют перегрузки, которые могут возникнуть в процессе эксплуатации робота в автоматическом режиме. Поэтому для устранения нежелательных явлений робот снабжается автоматическими выключателями и предохранителями, которые срабатывают при появляющихся перегрузках.
Для предупреждения людей о приближении робота применяются звуковые сигналы или световая индикация. Система управления ГАП может координировать работу светофоров, регулирующих движения транспортных роботов, благодаря чему предотвращаются столкновения роботов между собой.
В последнее время в ГАП все шире начинают применяться подвесные манипуляторы тельферного (с перемещением по монорельсу) и портального типов. Эти транспортные манипуляторы, как подвесные конвейеры, размещаются над технологическим оборудованием, что позволяет экономить производственные площади. Наиболее совершенные образцы этих роботов снабжаются датчиками внешней информации (тактильные щупы, система технического зрения и т. п.), обеспечивающими возможность адаптации к изменяющейся производственной обстановке. К транспортным манипуляторам тельферного типа относятся отечественные роботы ТРТ-250-1, "Спрут-1, СМ 40Ф2.80.01, УМ 160Ф2.81.01 и др., а к роботам портального типа - "Сигма" (Италия), "Адам-02" (СССР), "Пирин" (Болгария) и др.
В условиях ГАП важную роль играют автоматические склады. Для автоматизации транспортно-складских операций обычно используются роботы-штабелеры, представляющие собой каретку с погрузочно-разгрузочным механизмом и грузовой платформой, перемещающуюся в вертикальном и горизонтальном направлениях вдоль стеллажей склада. Система управления склада, реализуемая на базе микроЭВМ, обеспечивает автоматическое адресование роботов-штабелеров с учетом текущего состояния склада.
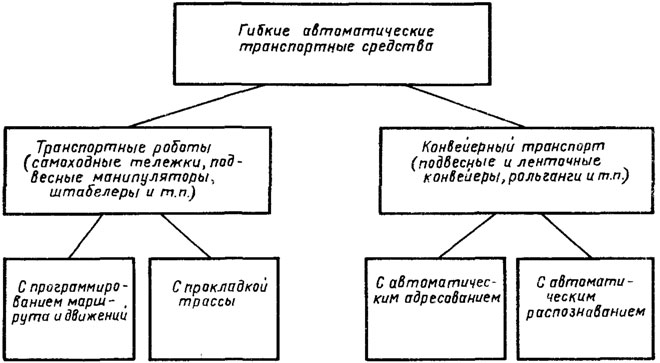
Рис. 6.2. Классификация гибких автоматических транспортных средств
Наряду с транспортными роботами в ГАП широко применяются конвейеры, т. е. автоматические транспортеры для непрерывной доставки грузов. Конвейеры делятся на подвесные, ленточные, пластинчатые, роликовые и др. Для обеспечения гибкости и быстрой адаптации транспортных конвейеров к изменяющимся производственным требованиям и условиям их система управления снабжается специальными средствами автоматического распознавания и адресования грузов.
На рис. 6.2 представлена общая классификация гибких автоматических транспортных средств с их разделением на два основных класса: транспортные роботы и конвейерный транспорт. При этом к первому классу относятся не только роботы с самоходным шасси, но и подвесные манипуляторы портального или тельферного типа, а также штабелеры. Каждый класс делится на подклассы в зависимости от способа задания трассы и программы движения или метода идентификации и адресования грузов. Данную классификацию при необходимости можно продолжить посредством дальнейшего разделения подклассов, например, по принципу управления (самонаведение на трассу, программное управление, адаптивное управление, управление с элементами искусственного интеллекта).
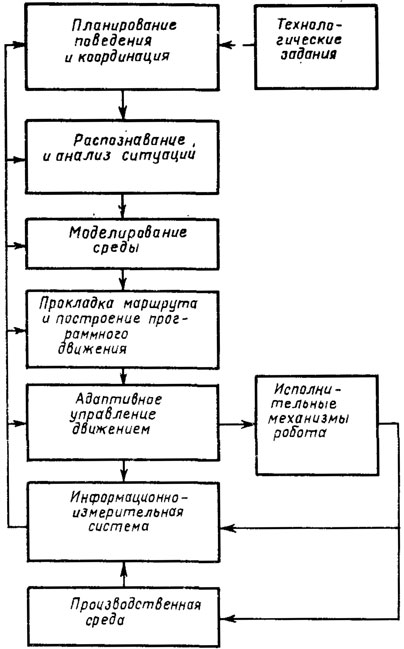
Рис. 6.3. Структурная схема адаптивной системы управления транспортным роботом с элементами искусственного интеллекта
В общем случае системы управления автоматическими транспортными средствами имеют иерархическую структуру. Если эти средства используются для автоматической транспортировки грузов в не детерминированных и изменяющихся условиях ГАП, их система управления должна быть гибкой и адаптивной. Более того, в ряде случаев приходится снабжать автоматические транспортные средства элементами искусственного интеллекта. Благодаря этому удается автоматизировать не только чисто двигательные, но и интеллектуальные функции, связанные, например, с планированием транспортных операций, самопрограммированием движений, обходом препятствий, распознаванием и адресованием деталей.
Иерархическая структура адаптивной системы управления транспортным роботом с элементами искусственного интеллекта представлена на рис. 6.3. Она включает подсистемы, выполняющие следующие основные функции:
- планирование поведения и координацию действий;
- распознавание сигналов и анализ производственной обстановки;
- моделирование среды и построение безопасного маршрута;
- программирование и оптимизация движений исполнительных механизмов;
- адаптивное программное управление приводами.
Указанные подсистемы активно взаимодействуют между собой, а также с двигательной и информационной системой робота. Алгоритмы функционирования всех элементов системы управления зависят от конструктивных особенностей транспортного робота, целей и условий его эксплуатации. Конкретизация этих алгоритмов, включая вопросы их программно-аппаратной реализации, дается ниже по мере описания различных образцов транспортных роботов с адаптивным и интеллектуальным управлением.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'