6.2. Транспортные роботы с самонаведением на трассу
В современных ГАП большое распространение получили транспортные роботы с колесным шасси, снабженные индукционной системой самонаведения на трассу, задаваемую с помощью токопроводящего кабеля. Рассмотрим устройство и принцип действия таких роботов на ряде примеров.
Одним из крупнейших разработчиков и поставщиков автоматизированных транспортных систем является японская фирма "Дайфуку" (Daifuku). Эта фирма разработала первый в Японии транспортный робот "Пронтоу" (Prontow) для ГАП. Сегодня в ГАП используется много вариантов этих роботов с грузоподъемностью от 1000 до 3000 кг. Все они имеют индукционную (электромагнитную) систему наведения по кабелю, проложенному под полом вдоль трассы. В ряде роботов предусмотрена возможность замены индукционной системы самонаведения на оптическую.
Транспортный робот "Конвой" представляет собой тележку с колесным шасси, управляемую от микроЭВМ. Он может двигаться вперед и назад вдоль трассы, поворачиваться на месте и останавливаться в заданном положении с высокой точностью (предельная точность около 1 мм). Робот имеет два ведущих колеса с независимым управлением, которые размещаются в середине шасси, и две пары ведомых колес в передней и задней части шасси. Для укладки и транспортировки грузов робот оснащен подъемным столом, выдвижными вилами, толкателем и другими устройствами.
Наведение на кабель, который предварительно прокладывается под полом вдоль трассы, осуществляется с помощью двух симметрично расположенных приемных катушек. Низкочастотный ток (обычно около 5-10 кГц) создает электромагнитное поле. Последнее индуцирует в приемных катушках напряжение. Если наведенное напряжение в левой и правой катушках равное, то и угловые скорости вращения левого и правого ведущих колес устанавливаются одинаковыми. При этом скорость вращения колес, задаваемая электродвигателями, определяется исходя из требуемой скорости движения робота вдоль трассы.
В том случае, когда разность напряжений, снимаемых с левой и правой катушек, не равна нулю, автоматически включается система управления, которая регулирует скорости вращения двигателей ведущих колес так, чтобы скомпенсировать возникшее отклонение. Если, например, трасса уходит вправо, как это показано на рис. 6.4, то напряжение, индуцируемое в правой V катушке, будет больше, чем напряжение в левой катушке. Система управления в этом случае производит регулирование таким образом, чтобы угловая скорость правого электродвигателя (а следовательно, и правого колеса) уменьшилась. При этом угловая скорость вращения левого двигателя остается заданной.
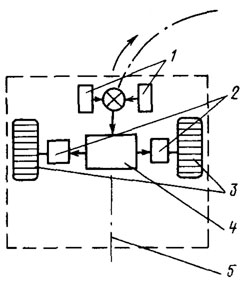
Рис. 6.4. Принцип управления транспортным роботом с информационной системой наведения: 1 - приемные катушки; 2 - электродвигатели; 3 - ведущие колеса; 4 - бортовая система управления; 5 - кабель наведения
Точность отслеживания трассы существенно зависит от выбора структуры и параметров закона регулирования угловой скорости, реализуемого системой автоматического управления. Для улучшения качества управления в не детерминированных условиях закон регулирования должен быть дополнен алгоритмом адаптации коэффициентов усиления в каналах обратной связи.
На систему автоматического управления возлагается и ряд других функций. Для предотвращения столкновений рабочая область разбивается на зоны, причем в каждой зоне допускается нахождение только одного робота. Поэтому, если две трассы проходят через одну и ту же зону, один из роботов останавливается и ждет, пока эта зона не освободится. Предусматривается также возможность диалогового управления транспортным роботом по радиоканалу на частотах 180 и 230 кГц. Для обеспечения управляемого перехода робота с одной трассы на другую по разным кабелям наведения пропускают токи с различными частотами. При смене трассы переключаются и приемные частоты катушек наведения.
Безопасность работы транспортного робота обеспечивается с помощью переднего и заднего бамперов. При соприкосновении бампера с препятствием робот сразу же останавливается. Экстренный останов предусмотрен также при значительном отклонении робота от трассы, при превышении заданной скорости движения, при снижении напряжения аккумуляторных батарей и при перегрузке приводов. Для предупреждения человека о приближении робота на нем устанавливается автомобильная стереофоническая система, которая проигрывает определенную мелодию при движении робота.
Технические характеристики транспортных роботов серии "Конвой" и "Пронтоу" представлены соответственно в табл. 6.1 и 6.2. Общий вид робота СУ-10 серии "Конвой" представлен на рис. 6.5, а общий вид робота РТ-50 серии "Пронтоу" - на рис. 6.6.
Фирма "Шиндлер-Дижитрон" (Schindler-Digitron) и фирма "Валмет" (
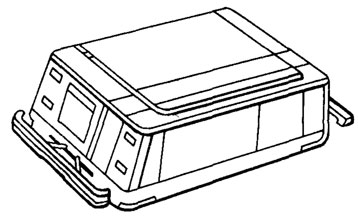
Рис. 6.5. Транспортный робот CV-10
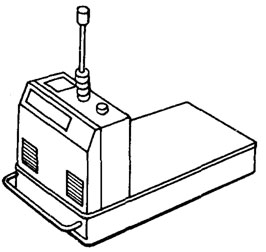
Рис. 6.6. Транспортный робот РТ-50 серии 'Конвой' серии 'Пронтоу'
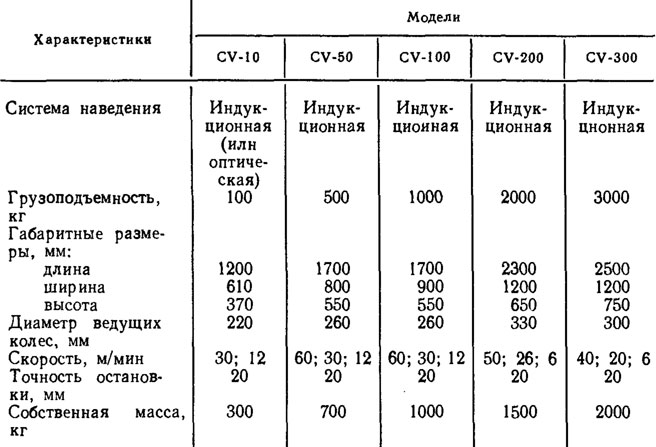
Таблица 6.1
Транспортные роботы типа "Робоматик" и "Роботрайлер" широко применяются в ГАП для обслуживания РТК, осуществляющих механическую обработку. Роботы "Робокарриер" используются в основном как автоматическая сборочная платформа, поэтому они нашли применение в сборочных ГАП в автомобильной промышленности и машиностроении.
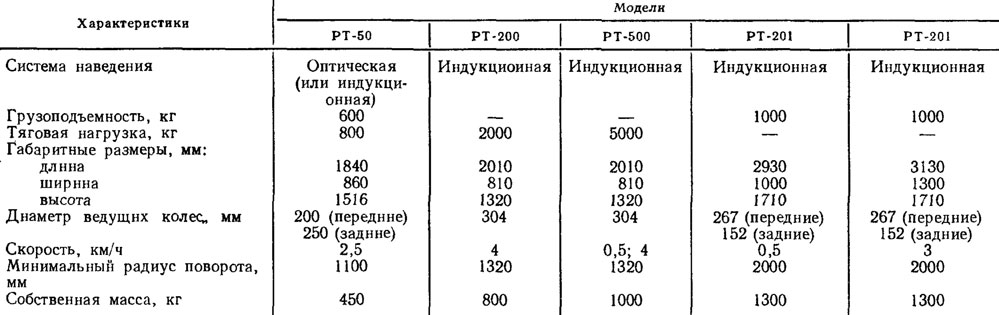
Таблица 6.2
Принцип управления роботом "Робоматик" заключается в следующем. По кабелю наведения, приложенному под полом вдоль трассы движения, пропускают низкочастотный ток, который генерирует электромагнитное поле. Цель управления заключается в удержании приемной катушки (антенны), жестко закрепленной перед ведущим колесом, в районе максимальной напряженности поля, т. е. прямо над кабелем. Уменьшение воспринимаемой катушкой напряженности поля свидетельствует об отклонении робота от трассы. Для компенсации этого отклонения вырабатывается корректирующий сигнал на рулевой электропривод ведущего колеса.
Индукционное управление ведущими колесами роботов типа "Роботрайлер" и "Робокарриер" осуществляется по принципу самонаведения, иллюстрируемому рис. 6.4. Прямая и обратная связь бортовой системы управления рассматриваемых роботов с системой управления ГАП осуществляется с помощью двух специальных проводов связи, размещаемых в кабеле наведения. При передаче информации и команд роботу извне осуществляется соответствующая модуляция тока в проводе прямой связи, а генерируемое при этом электромагнитное поле воспринимается приемными катушками (антеннами), установленными на шасси робота. Обратная передача информации от робота к системе управления ГАП производится по проводу обратной связи посредством модуляции электрического тока бортового передатчика.
Переход с одной трассы на другую осуществляется роботом либо автономно (в этом случае в зоне пересечения трасс определяется местоположение робота по коду плиты, на которой находится робот), либо по команде от системы управления ГАП (в этом случае внешняя система управления переключает токи в кабелях наведения и робот автоматически отслеживает ту трассу, которая соответствует активированному кабелю).
Координация работы роботов и контроль за транспортировкой грузов возлагается на систему управления ГАП. Остальные функции, связанные с программируемой обработкой и транспортировкой грузов, выполняются бортовой системой автоматического управления, реализуемой на базе микроЭВМ или микропроцессоров.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'