6.3. Транспортные роботы с адаптивным управлением
Главным недостатком транспортных роботов с индукционным самонаведением является необходимость предварительной прокладки токопроводящего кабеля вдоль трассы движения. В условиях ГАП технологические маршруты и связанные с ними трассы для транспортировки грузов часто изменяются. Поэтому на практике не удается, как правило, заранее рассчитать и проложить все трассы, потребность в которых может возникнуть в будущем. В то же время перекладка кабеля наведения при изменении трассы трудоемка и требует вмешательства человека. Все это снижает производительность и автономность ГАП. С этой точки зрения более перспективными для ГАП являются транспортные роботы с адаптивным программным управлением от бортовых микропроцессоров или микроЭВМ [126]. Отличительной чертой этих робо-тов, относящихся ко второму поколению автоматических транспортных средств, является формирование и хранение трассы (маршрута) движения в памяти управляющей ЭВМ. При этом вообще отпадает необходимость в предварительной прокладке трассы в рабочей зоне в виде кабеля индукционного наведения или светочувствительной полосы.
Адаптивные транспортные роботы благодаря гибкому программированию движений способны оперативно корректировать и оптимизировать трассу, объезжать препятствия и обеспечивать точную доставку грузов по адресам, предписываемым технологическим процессом.
Методы автоматического программирования движений транспортных роботов с колесным и гусеничным шасси, включая алгоритмы прокладки и оптимизации маршрутов и интерполяции программных движений, рассмотрены в работах [14, 15, 28, 51]. Поэтому ниже ограничимся вопросами программно-аппаратурной реализации этих алгоритмов и их использованием в адаптивных системах управления транспортных роботов.
Для обеспечения движения робота по маршруту, хранящемуся в памяти управляющей ЭВМ, необходима навигационная система. Эта система, являющаяся частью информационной системы робота, определяет текущее положение и ориентацию робота. Знание указанных навигационных характеристик нужно для того, чтобы система управления могла оценить, насколько фактический маршрут движения робота отклоняется от программного.
Таким образом, навигационная система служит источником сигналов обратных связей для системы адаптивного программного управления, осуществляющей корректировку закона управления с учетом реального местоположения и ориентации робота. Реализация этой системы требует оснащения робота соответствующими датчиками (гирокомпасом, дальномером и т. п.), а рабочей зоны - внешними ориентирами (световыми маяками, ультразвуковыми реперами и т. п.) и средствами оперативной обработки навигационной информации.
В общем случае проектирование и создание системы адаптивного программного управления транспортным роботом представляет собой сложную научно-техническую проблему, поэтому на практике эта проблема решается поэтапно.
На первом этапе осуществляется алгоритмическое конструирование и имитационное моделирование системы адаптивного программного управления с помощью ЭВМ. Значительный объем работ на данном этапе связан с синтезом приемлемых (в частности, оптимальных) алгоритмов прокладки маршрута, построения программных движений, шасси и их адаптивной стабилизации с за-данной точностью. Работоспособность и эффективность выбранных алгоритмов проверяется путем их программной реализации и имитационного моделирования на ЭВМ управляемых движений шасси транспортного робота.
На втором этапе производится полунатурное моделирование и экспериментальное исследование на лабораторном макете робота как отдельных подсистем, так и системы адаптивного управления в целом. При этом управление осуществляется от ЭВМ в реальном масштабе времени.
В результате такого макетного проектирования окончательно отбирается комплекс алгоритмов, наиболее адекватных решаемой навигационно-транспортной задаче, и выявляются дополнительные требования, которые необходимо учесть при аппаратурно-программной реализации системы адаптивного управления.
Наконец, на третьем этапе создается опытный образец транспортного робота, в системе управления которого воплощены наиболее эффективные принципы и алгоритмы адаптивного программного управления. Затем этот образец проходит опытно-промышленную эксплуатацию в условиях ГАП и тиражируется в требуемом числе экземпляров в соответствии с имеющимся спросом.
Рассмотрим некоторые перспективные образцы адаптивных транспортных роботов. Сразу же отметим, что эти роботы пока созданы лишь в виде лабораторных макетов и служат, главным образом, для отработки программного обеспечения адаптивных систем управления и навигации в реальном масштабе времени в условиях, имитирующих производственные. Однако эксперименты с такими макетами роботов, обладающими расширенными функциональными и адаптационными возможностями чрезвычайно полезны. Они позволяют после определенной модификации и доработки макетов создать промышленные образцы адаптивных роботов, обеспечивающие автоматическую транспортировку грузов в не детерминированной и изменяющейся обстановке, характерной для многих ГАП.
В 1975 г. в лаборатории теоретической кибернетики Ленинградского государственного университета были созданы два макета адаптивных транспортных роботов, управляемых от ЭВМ [14, 15]. Оба макета представляют собой самоходное гусеничное шасси, приводимое в движение с помощью двух независимых электродвигателей постоянного тока, сопряженных с ведущими звездочками. Маневрирование осуществляется реверсом ведущих звездочек или изменением скорости. Макеты отличаются главным образом устройством информационной системы, в состав которой входит и навигационная система.
Система управления обеспечивает выполнение следующих двигательных команд: "вперед", "назад", "влево", "вправо". Эти команды вырабатываются ЭВМ, причем для управления первым макетом используется ЭВМ "Одра-1204", а для управления вторым макетом - ЭВМ БЭСМ-ЗМ. Алгоритмы обработки поступающей информации, планирования безопасного маршрута, программирования движения шасси и адаптивного управления приводами реализованы в виде пакета программ, имеющего иерархическую модульную структуру.
На борту первого макета "Адаптрон-1", изображенного на рис. 6.7, установлен сканер с независимым электроприводом, вращающийся в горизонтальной плоскости, ультразвуковой дальномер и узконаправленный фотодатчик. Точность измерения угла поворота сканера составляет 1°;, а обеспечиваемый им сектор обзора заключен в пределах от -175° до +175°.
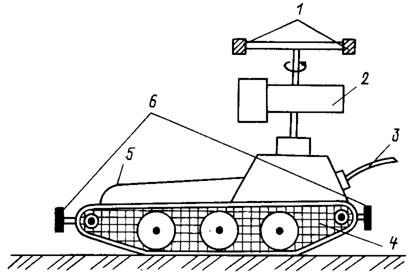
Рис. 6.7. Общий вид адаптивного транспортного робота: 1 - фотоприемиики; 2 - ультразвуковой сканирующий дальномер; 3 - кабель связи с управляющей ЭВМ; 4 - ведущие звездочки, сопряженные с электродвигателем; 5 - бортовой электронный блок; 6 - тактильные датчики
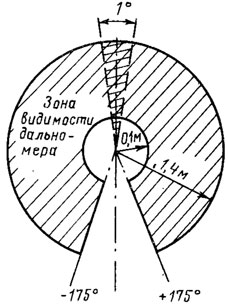
Рис. 6.8. Сектор обзора и зона видимости дальномера
Ультразвуковой дальномер позволяет определить расстояние до препятствий в диапазоне от 0,1 до 1,4 м с точностью 0,01 м. Зона видимости дальномера показана на рис. 6.8. Для определения расстояния до препятствия машинный датчик времени (таймер) фиксирует моменты времени между посылкой и приемом ультразвуковых импульсов. Измерение интервала времени между импульсами и вычисление на этой основе дальности до препятствия осуществляется с помощью соответствующей подпрограммы.
Для определения местоположения и ориентации робота используется имитатор навигационной системы, представляющей собой узконаправленный фотодатчик и четыре световых маяка. Принцип действия навигационной системы поясняет рис. 6.9. По команде о выдаче навигационной информации с потенциометрического датчика сканера считывается сигнал, пропорциональный углу поворота фотодатчика, а пороговый элемент формирует двоичный сигнал, свидетельствующий о наличии (или отсутствии) светового маяка в "поле зрения" фотодатчика. Эти сигналы через аналого-цифровой преобразователь подаются в ЭВМ "Одра-1204", где программный модуль навигации вычисляет координаты и ориентацию робота в неподвижной системе координат и передает их в адаптивную систему управления.
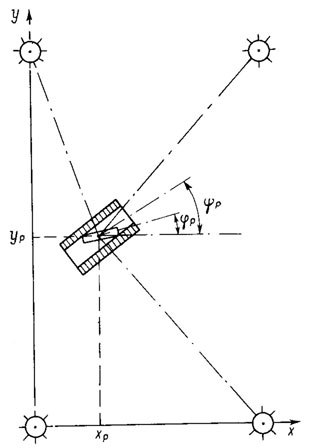
Рис. 6.9. Принцип определения навигационных характеристик робота
У второго макета робота "Адаптрон-2" навигационная система имитируется с помощью специального измерительного полигона и электромагнитных контактных датчиков, установленных на переднем и заднем бамперах робота.
Токопроводящая поверхность полигона, выполненного из двусторонне фольгированного гетинакса, расчленена на 16*33 прямоугольных ячеек. Определение положения и ориентации робота осуществляется путем подачи напряжения через электромагнитные датчики и фиксации текущих координат скользящих контактов [14].
Управление движением шасси и опрос датчиков информационно-навигационной системы осуществляются посредством формирования последовательности командных сигналов необходимой длительности. Например, по команде "вперед" одновременно включаются тяговые электроприводы, которые обеспечивают поступательное движение робота в течение времени действия команды.
По команде сбора информации о препятствиях сканирующий дальномер осуществляет локацию окружающей среды, обнаруживает и определяет местоположение препятствий и формирует в запоминающем устройстве системы управления модель среды. При этом информация о препятствиях приводится к виду, удобному для ее использования в программном модуле планирования безопасного маршрута. Подпрограмма обработки дальнометрической информации запоминает все обнаруженные дальномером точки на поверхности препятствий, восстанавливает по этим данным контуры препятствий и уточняет (корректирует) модель среды путем анализа локальной информации о препятствиях, полученной из разных точек обзора.
При автоматическом построении маршрута движения робота используется простейшая модель среды, представляющая собой плоский план рабочей зоны (например, план цеха), на котором препятствия (в том числе технологическое оборудование) аппроксимируются многогранниками. Искомый маршрут строится в виде ломаной линии, соединяющей начальное и конечное положение робота и огибающей препятствия. Маршрут называется оптимальным, если он имеет наименьшую длину из всех возможных маршрутов, ведущих в целевую точку.
Если план рабочей зоны известен заранее, как это часто бывает на практике, то возможно построение оптимального маршрута. В этом случае обычно используются программы, реализующие соответствующие алгоритмы метода динамического программирования [23, 51, 58]. Для того чтобы при движении по оптимальному маршруту робот не столкнулся с препятствиями, нужно строить маршрут с учетом габаритных размеров шасси. Это требование обеспечивается посредством предварительной замены контуров препятствий границами зон безопасности, которые отстоят от этих контуров на расстояние, превышающее диаметр круга, в который вписывается шасси робота. После такого расширения препятствий оптимальный безопасный маршрут строится автоматически.
Некоторые осложнения возникают в том случае, когда задана не одна целевая точка, а множество точек. С такой ситуацией приходится сталкиваться, когда имеется несколько складов или накопителей и роботу нужно выбрать среди них ближайший. В подобных случаях робот выбирает ту конечную точку, до которой оптимальный маршрут является кратчайшим по сравнению с маршрутами, ведущими в другие целевые точки.
На практике часть объектов среды, играющих роль препятствий, может быть неизвестна роботу. Сведения об этих объектах доставляются информационной системой (например, ультразвуковым сканирующим дальномером) только в небольшой окрестности текущего положения робота. В таких условиях из-за неполной информации о препятствиях в общем случае невозможно построить оптимальный безопасный маршрут. Тем не менее и в этом случае удается синтезировать алгоритмы вычисления локально оптимального маршрута, используя которые, робот достигает целевой точки на основе обработки накапливающейся локальной информации о неизвестных препятствиях.
Суть этих алгоритмов заключается в следующем [14, 15]. Робот, находясь в начальной точке, опрашивает информационную систему и, если в зоне ее действия обнаружатся препятствия, вносит соответствующие коррективы в модель среды. На основании этой модели он строит локально-оптимальный безопасный маршрут и перемещается по нему в пределах начальной зоны обзора. Затем вновь опрашивается информационная система, корректируется модель среды, вычисляется и отрабатывается дальнейший маршрут и т. д. В результате строится безопасный маршрут движения в виде ломаной линии, соединяющей начальную и целевую точки и огибающей заранее неизвестные препятствия.
Для адаптивного управления движением робота по проложенному маршруту с требуемой скоростью нужно прежде всего, построить программную траекторию его центра масс. Иначе говоря, необходимо построить закон изменения во времени координат центра масс xp, yp и, возможно, курсового угла Ψр, обеспечивающий движение робота по заданному маршруту с учетом имеющихся конструктивных ограничений. Эта задача легко решается, если искомая программная траектория строится в виде полинома от времени. Коэффициенты этого полинома выражаются через промежуточные точки маршрута и заданные ограничения [14, 113].
Синтез закона управления, обеспечивающего осуществление заданной программной траектории, осложняется тем, что реальная траектория движения робота существенно зависит от распределения нагрузки на шасси, физико-механических свойств поверхности, динамических характеристик исполнительных приводов и т. д. На практике указанные факторы зачастую неизвестны. Более того, некоторые из них могут непредсказуемо дрейфовать в широком диапазоне.
Если используемый закон управления не отражает происходящих изменений и не учитывает неопределенность характеристик робота и среды, то реальная траектория робота будет отличаться от программной. При этом с течением времени рассогласование будет возрастать. Поэтому для обеспечения требуемой точности движения приходится часто опрашивать навигационную систему и корректировать программную траекторию и закон управления с учетом фактического положения и ориентации робота. Однако определение навигационных характеристик и коррекция программной траектории требуют значительного времени. Это приводит к управлению по устаревшей информации и, как следствие, к потере точности.
Более перспективным является адаптивный подход к синтезу закона управления. В основе этого подхода лежат принципы идентификации или самонастройки неопределенных характеристик [14, 15, 107, 114, 115]. Идентификация сводится к возможно более точному определению (вычислению) неизвестных параметров по результатам наблюдения за движением робота при заданном законе управления. Однако из-за наличия помех и непредсказуемых возмущений точная идентификация на практике затруднена, а в ряде случаев и невозможна [101], поэтому для определения текущих значений неопределенных или дрейфующих параметров робот приходится оснащать дополнительными датчиками.
Закон адаптивного управления, основанный на принципе самонастройки, представляется более предпочтительным по ряду причин. Во-первых, он позволяет достичь цели без оснащения робота дополнительными датчиками. При этом самонастройка неопределенных параметров происходит в процессе нормальной эксплуатации робота по сигналам рассогласования между реальной и программной траекториями. Во-вторых, система управления с самонастройкой придает роботу высокую надежность. Это обеспечивается большими адаптационными возможностями такой системы по отношению к широкому классу помех и возмущений, в том числе и таких, измерение или оценивание которых в рамках идентификационного подхода могло быть вообще не предусмотрено.
Законы адаптивного программного управления, использующие оптимальные и субоптимальные алгоритмы самонастройки, описанные в работах [14, 107, 109, 119, 125, 1311, были реализованы на ЭВМ "Одра-1204" и БЭСМ-3м в виде пакетов программ. Рассмотрим подробнее особенности этих пакетов и экспериментальные результаты их применения для управления макетами транспортных роботов "Адаптрон-1 и "Адаптрон-2" в реальном масштабе времени [14, 151. Структурно-функциональная схема первого макета представлена на рис. 6.10. Характеристики каналов прямой и обратной связи приведены в табл. 6.3.
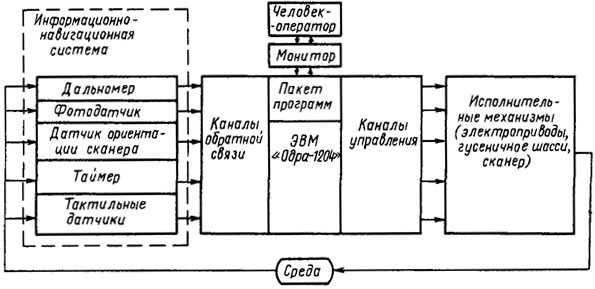
Рис. 6.10. Структурно-функциональная схема транспортного робота 'Адаптрон-1'
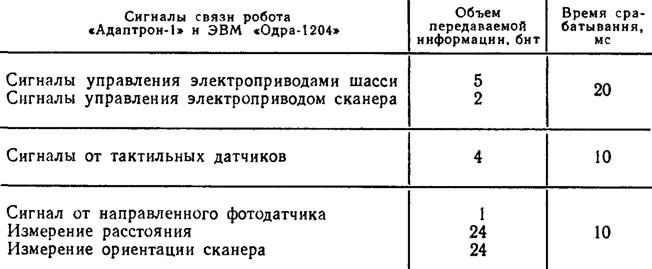
Таблица 6.3
В состав пакета программ входят следующие иерархически связанные программные модули:
- модуль командного уровня, обеспечивающий интерпретацию задания, вводимого человеком с помощью монитора, планирование и координацию работы всех остальных программных модулей;
- модуль формирования модели среды на основании данных, поступающих от сканирующего дальномера;
- модуль построения и оптимизации безопасного маршрута с учетом априорной и текущей информации о препятствиях;
- модель программирования (интерполяции) движения робота по заданному маршруту;
- модуль навигации и адаптивного управления исполнительными приводами,
Модуль формирования модели среды запоминает все точки препятствий, обнаруженные ультразвуковым дальномером, и восстанавливает контуры препятствий. Предусмотрена возможность интеграции фрагментов моделей среды, полученных из разных ракурсов, в единую модель. Последняя представляет собой по существу банк данных об окружающей робота обстановке.
Модуль построения и оптимизации безопасного маршрута выполнен в двух вариантах [14, 23]:
- формирование локально-оптимального маршрута методом направленного перебора вариантов на "квантованной" модели среды;
- формирование оптимального маршрута при помощи алгоритма анализа графа препятствий и алгоритма направленного перебора вариантов.
Модуль программирования движения робота по заданному маршруту формирует программную траекторию, которая выступает как цель управления. В общем случае при синтезе программных траекторий необходимо учитывать конструктивные и динамические особенности шасси робота, а также ограничения на скорости и ускорения движения, присущие исполнительным при-водам.
Модуль навигации и адаптивного управления решает навигационную задачу, иллюстрируемую рис. 6,9, и использует текущие навигационные характеристики робота для адаптивной коррекции закона управления в случае любого отклонения траектории движения робота от программной траектории. В этом модуле в качестве алгоритмов адаптации используются локально-оптимальные рекуррентные и много шаговые (акселерантные) алгоритмы решения эстиматорных неравенств. Эти неравенства сконструированы таким образом, что из их выполнения следует достижение цели, т. е. движение робота по программной траектории с заданной точностью [14, 109, 119, 125, 131].
Опишем взаимодействие рассмотренных программных модулей в задаче перемещения робота "Адаптрон-1 в заданную целевую точку в условиях, когда часть препятствий заранее неизвестна. Получив через монитор информацию о координатах целевой точки, модуль командного уровня инициирует модуль формирования модели среды. Этот модуль опрашивает сканирующий дальномер и вносит информацию об обнаруженных препятствиях в модель среды. Полученная информация используется далее в модуле построения и оптимизации безопасного маршрута, который, в свою очередь, инициирует модуль программирования движений. Последний выдает программную траекторию в виде дискретной последовательности целевых точек, которые поступают в модуль навигации и адаптивного управления. Здесь в результате решения навигационной задачи определяются фактические координаты центра масс робота и его ориентация (курсовой угол). По отклонению текущего положения робота от целевой точки формируется адаптивное управление, которое подается на приводы ведущих звездочек.
После завершения движения в очередную целевую точку модуль формирования модели среды запоминает новую информацию о препятствиях (если она поступила от дальномера) и передает управление модулю построения и оптимизации безопасного маршрута. Последний проверяет пригодность ранее построенного оптимального маршрута с учетом новых данных о препятствиях и о фактическом положении робота. В этом случае, если ранее построенный маршрут оказался непригодным для продолжения движения, он бракуется и формируется новый безопасный маршрут. После этого вновь инициируется модуль навигации и адаптивного управления и цикл повторяется.
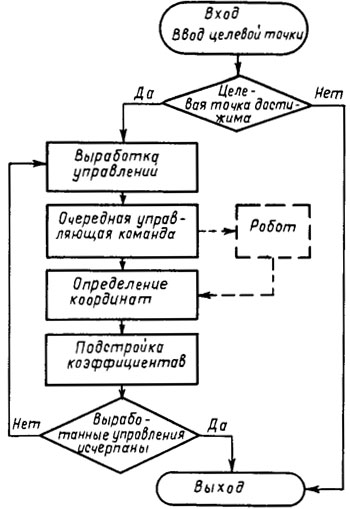
Рис. 6.11. Блок-схема модуля навигации и адаптивного управления
Алгоритм функционирования модуля навигации и адаптивного управления иллюстрируется блок-схемой, представленной на рис. 6.11. Для проверки адаптационных возможностей этого модуля в экспериментах по моделированию на ЭВМ управляемых движений робота "Адаптрон-1" в широких пределах варьировались как важнейшие динамические характеристики шасси и приводов, так и свойства среды. Изменению подвергались нагрузка на шасси, питающее напряжение приводов, характер грунта, расположение препятствий и т. п. От системы управления требовалось, чтобы она, не зная о вариациях указанных характеристик, осуществляла движение робота по заданной траектории. Достижение этой цели возможно лишь на базе средств самонастройки, реализованных в основном в модуле навигации и адаптивного управления при-водами.
Эксперименты по цифровому моделированию управляемых движений адаптивного робота "Адаптрон-1" показали, что при любом резком изменении параметров робота или условий его эксплуатации реальные движения в той или иной степени отклонялись от намеченного маршрута. Однако после нескольких (около 10) коррекций оценок параметров в процессе самонастройки закона управления требуемая точность движения восстанавливалась.
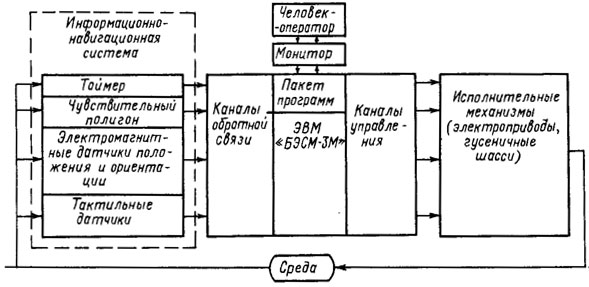
Рис. 6.12. Структурно-функциональная схема транспортного робота 'Адаптрон-2'
Эксперименты с большим числом заранее неизвестных, а также нестационарных препятствий показали, что рассматриваемая система управления, программно реализованная на ЭВМ "Одра-1204", не обеспечивает решение сложных "лабиринтных" задач в реальном масштабе времени. Для успешного решения этих задач нужно перейти к мультимикропроцессорной реализации адаптивной си-стемы управления на базе современных быстродействующих микроЭВМ и микропроцессоров.
Аналогичные эксперименты по адаптивному программному управлению проводились и со вторым макетом робота "Адаптрон-2". Структурно-функциональная схема этого макета представлена на рис. 6.12. Характеристики каналов прямой и обрат-ной связи сведены в табл. 6.4.
Значительное внимание уделялось отладке и проверке работоспособности модуля построения оптимального безопасного маршрута при наличии большого числа препятствий. В частности, а ЭВМ моделировалась среда типа ГАП, изображенная на рис. 6.13. Здесь роль препятствий для транспортного робота играют станки и другое технологическое оборудование. Задача заключается в транспортировке грузов от автоматического склада 1 (склад заготовок) к автоматическому складу 2 (склад готовой продукции) по кратчайшему маршруту, проходящему через точки 1-6. В результате работы программного модуля были построены оптимальные маршруты, последовательно соединяющие указанные точки и огибающие препятствия. Эти маршруты изображены на рис. 6.13 114].
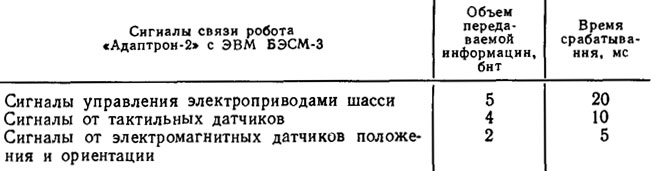
Таблица 6.4
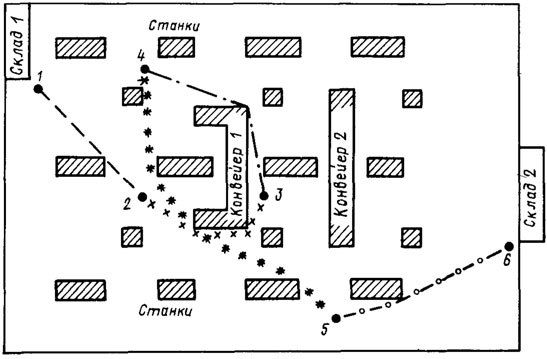
Рис.6.13. Оптимальные маршруты транспортировки грузов
Управление движением по заданному маршруту осуществлялось согласно алгоритмам, блок-схема которых представлена на рис. 6.14. Вид алгоритма и необходимая для его реализации информация определяются способом управления. Выбор способа управления обеспечивается переключением ключа коммутатора, имеющего три позиции. В позиции 1 подключаются алгоритмы, соответствующие адаптивному управлению, в позициях 2 и 3 - алгоритмы программного и сенсорного управления соответственно.
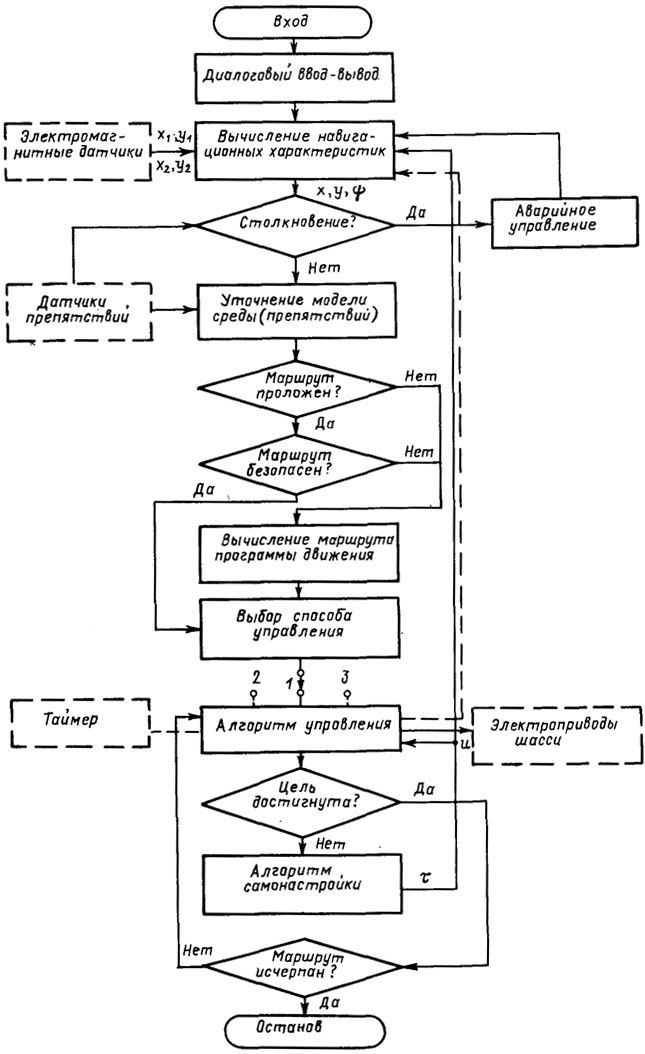
Рис. 6.14. Блок-схема алгоритма адаптивного управления транспортным роботом 'Адаптрон-2'
Наиболее эффективными по точности и быстродействию оказались алгоритмы адаптивного управления, предусматривающие обратную связь через информационно-навигационную систему и самонастройку параметров закона управления. При программном управлении без обратной связи погрешности при отработке маршрута накапливались и цель, как правило, не достигалась. Наконец, алгоритмы сенсорного управления, требующие постоянного вычисления текущего положения и ориентации робота, обеспечивали приемлемую точность отработки маршрута при условии, что уровень априорной неопределенности и возмущений достаточно мал.
В экспериментах по адаптивному управлению обоими макетами транспортных роботов в реальном масштабе времени варьировались в широком диапазоне целый ряд условий и параметров, а именно: расположение препятствий в рабочей зоне, распределение нагрузки на шасси, электромеханические параметры приводов, характер грунта и т. д. Благодаря самонастройке системы управления роботы обеспечивали достижение цели с заданной точностью в частично неопределенных и непредсказуемо изменяющихся условиях эксплуатации.
Данные, характеризующие сложность и быстродействие основных программных модулей адаптивной системы управления каждого из описанных макетов, приведены в табл. 6.5.
Экспериментальная проверка разработанного алгоритмического и программного обеспечения при адаптивном управлении макетами транспортных роботов "Адаптрон-1 и "Адаптрон-2" свидетельствует о его высокой эффективности и надежности. Для использования этого обеспечения в условиях ГАП в реальном масштабе времени целесообразна мультимикропроцессорная реализация адаптивной системы управления.
Аналогичные результаты и выводы получены при макетировании и исследовании адаптивных транспортных роботов с колесным и шагающим шасси в Институте кибернетики АН УССР, в Институте прикладной математики АН СССР, в МГУ и в ряде других организаций [51, 79, 121]. В последнее время появились также опытные образцы колесных транспортных роботов с элементами адаптации, которые успешно используются в некоторых отечественных ГАП. Примером могут служить транспортные роботы с оптическим самонаведением на легко изменяемую трассу типа НЦ ТМ-25 и НЦ ТМ-12 из семейства модульных промышленных роботов "Электроника".
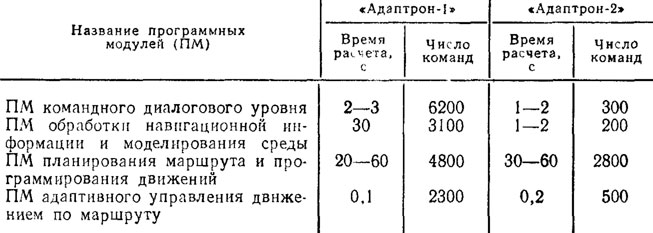
Таблица 6.5
Адаптивные транспортные роботы сегодня находят применение во многих ГАП промышленно развитых стран. В СССР они активно внедряются в РТК для механической обработки на Ленинградском заводе имени М. И. Калинина, в Московском ПО "Красный пролетарий", на Ивановском станкостроительном производственном объединении и на ряде других заводов [33, 34].
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'