6.4. Адаптивные манипуляционно-транспортные роботы с элементами искусственного интеллекта
Для расширения функциональных возможностей транспортных роботов на их борту иногда устанавливается один или несколько манипуляторов. В результате получаются комбинированные манипуляционно-транспортные роботы, которые могут не только транспортировать грузы, но и самостоятельно загружаться и разгружаться, а также манипулировать грузами. Разработка таких универсальных роботов для ГАП представляет интерес с различных точек зрения. В манипуляционно-транспортных роботах сконцентрированы многие проблемы механики, теории адаптивного управления, навигации и искусственного интеллекта. С точки зрения механики двигательная система этих роботов представляет собой комплекс исполнительных механизмов с голономными и не голономными связями, позволяющий автоматизировать широкий спектр ручных и транспортных операций. С позиций теории управления эти роботы являются сложной нелинейной многосвязной и многомерной системой, активно взаимодействующей с внешней средой. Организация автономного функционирования таких роботов в изменяющейся производственной обстановке не-возможна без развитой информационно-навигационной системы и связанной с ней адаптивной системы управления. Наконец, с точки зрения теории искусственного интеллекта манипуляционно-транспортные роботы интересны тем, что они функционируют в не детерминированных и изменяющихся условиях, где часть оборудования ГАП играет роль препятствий, а объекты манипулирования и грузы, подлежащие транспортировке, могут иметь произвольное расположение и ориентацию. Поэтому возникает необходимость придать адаптивной системе управления такие интеллектуальные функции, как распознавание объектов, анализ обстановки, формирование понятий и моделирование окружающей среды.
Рассмотрим конструктивные особенности адаптивных роботов с элементами искусственного интеллекта на примере манипуляционно-транспортного робота "Адаптрон-3", изображенного на рис. 6.15. Макет этого робота и математическое обеспечение его адаптивной системы управления с элементами искусственного интеллекта созданы в 1977-1980 гг. в лаборатории теоретической кибернетики Ленинградского государственного университета [14, 15, 38, 39]
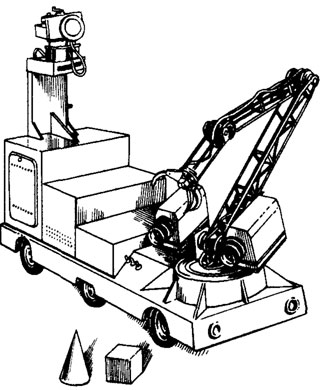
Рис. 6.15. Общий вид манипуляционно-транспортного робота 'Адаптрон-3'
Колесные шасси робота имеют три оси. Передняя и задняя оси механически связаны между собой так, что рулевой сервопривод (на базе двигателя постоянного тока ДПМ-20) обеспечивает синхронный поворот передней и задней пары колес. Средняя ось имеет два тяговых электрических сервопривода (на базе двигателей постоянного тока ДПМ-25), связанных с ведущими колесами. Шасси робота подрессоренно. Его габаритные размеры: длина - 0,9 м, ширина - 0,26 м, высота - 0,57 м. Среди других технических характеристик шасси отметим следующие: грузоподъемность 27 кг; скорость 0,5 м/с; радиус разворота 0,6 м; клиренс 25 мм; диаметр колес 90 мм; питание автономное, от ба-тареи на 12 В,
Манипулятор робота имеет четыре степени свободы и сменный захват, приводимые в движение с помощью сервоприводов на базе двигателей постоянного тока типа ДПМ-20 и ДПМ-25. Двигатели манипулятора расположены в специальном блоке, закрепленном на шасси. Передача движения к звеньям манипулятора осуществляется с помощью гибкого вала, тяги и самотормозящихся зубчаточервячных редукторов. Манипулятор имеет следующие технические характеристики: грузоподъемность 0,02 кг; длина первого, второго и третьего звеньев 0,505; 0,361 и 0,216 м соответственно; поворот первого звена 160°; поворот второго звена ±90; ° поворот основания манипулятора ±110°; максимальная угловая скорость поворота звеньев 30 град/с; точность позиционирования ±20 мм; питание автономное, от батареи на 12 В.
Информационно-навигационная система включает в себя: главный сканирующий ультразвуковой локатор дальнего обзора (радиус действия до 3 м) и жестко с ним связанный узконаправленный навигационный фотодатчик; передние и задние ультразвуковые локаторы ближнего действия (радиус действия до 1 м); две телевизионные камеры; потенциометрические датчики углов, связанные с сервоприводами шасси, манипулятора и сканера. Главный ультразвуковой локатор, его измеритель-приемник, а также узконаправленный фотодатчик расположены на башенке из стеклопластика, поворачивающейся в пределах ±135° с помощью сервопривода сканера с двигателем типа ДПМ-20. Излучатели и приемники локаторов ближнего действия расположены симметрично на переднем и заднем бортах кузова, выполненного из стеклопластика.
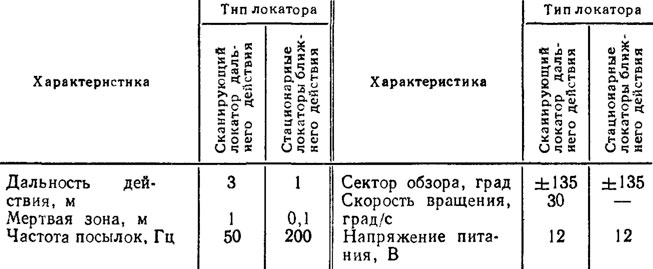
Таблица 6.6
Основные технические характеристики бортовых ультразвуковых локаторов приведены в табл. 6.6.
Координация работы ультразвуковых локаторов осуществляется специальным устройством, реализованным в виде платы. По команде от ЭВМ устройство выдает сигналы разрешения работы одному из пяти локаторов, который лоцирует окружающие объекты и определяет расстояние до ближайших из них. Одновременно оно управляет частотой зондирующих импульсов в зависимости от функционирования локаторов ближнего или дальнего действия.
Задающий кварцевый генератор с тактовой частотой 100 кГц и связанный с ним делитель частоты формируют импульсы излучения, а также стробирующие импульсы, создающие мертвую зону локаторов. Специальная микросхема формирует сигнал дальности, длительность которого пропорциональна расстоянию от излучателя до объекта, отразившего импульс излучения. Эта информация поступает в систему управления робота и используется для уточнения модели среды.
Для управления автономным манипуляционно-транспортным роботом от ЭВМ используется широтно-импульсная модуляция. При этом управляющие сигналы кодируются в форме длительности импульсов, которая может изменяться в пределах от 1,2 до 4 мс. Передача управляющих сигналов на электродвигатели исполнительных приводов в таком модулированном виде очень удобна.
Этот вид кодирования позволяет использовать только одну линию связи как для опроса датчиков информационно-навигационной системы, так и для много координатного управления исполнительными приводами и механизмами робота.
В качестве линии связи может использоваться обычная линия приводной связи (кабель связи) или радиоканал. Пачки управляющих импульсов подаются на коммутатор, который по признаку в пачке передает их либо на приводы шасси, либо на приводы манипулятора, либо на привод сканера. Пачки информационных импульсов от датчиков робота подаются по телеметрическому каналу связи в управляющую ЭВМ.
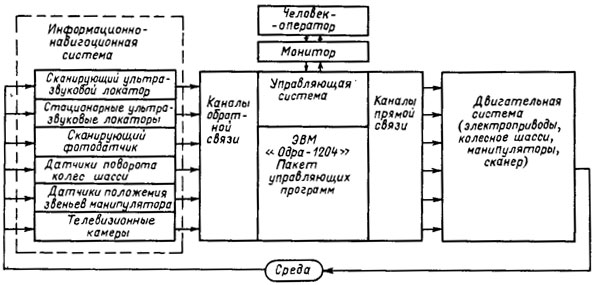
Рис. 6.16. Структурно-функциональная схема манипуляционно-транспортного робота 'Адаптрон-3'
С целью ввода в ЭВМ "Одра-1204" информации от ультразвуковых локаторов ближнего и дальнего действия разработаны специальные программные модули декодирования и накопления сенсорной информации. Аналогичные интерфейсные программные модули созданы для организации управления роботов от ЭВМ. Основная сложность при разработке программных модулей прямой и обратной связи состоит в том, что стандартный интерфейс ЭВМ "Одра-1204" не позволяет работать с широтно-модулированными сигналами. Именно поэтому потребовалось создать интерфейсные программы, расширяющие функциональные возможности данной универсальной ЭВМ, используемой в качестве управляющей.
Структурно-функциональная схема адаптивного манипуляционно-транспортного робота "Адаптрон-3" представлена на рис. 6.16. Элементы адаптации и искусственного интеллекта разработаны в виде пакета управляющих программ, реализующего соответствующие алгоритмы обработки информации, распознавания и анализа обстановки, моделирования рабочей зоны, прокладки, оптимального безопасного маршрута среди препятствий, программирования движений самоходного шасси и бортового манипулятора и самонастройки закона управления исполнительными приводами.
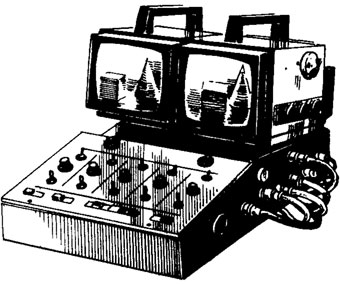
Рис. 6.17. Пульт целеуказания и управления роботом
В качестве системы технического зрения робота используются две телекамеры, установленные на вращающемся основании манипулятора. Стереоизображение видимой обстановки вводится в ЭВМ и отображается на пульте дистанционного целеуказания и управления, представленном на рис. 6.17.
Для автоматического распознавания объектов и анализа обстановки вблизи робота разработаны два метода. Первый метод основывается на вычислении признаков видимых объектов, инвариантных по отношению к преобразованиям их изображения, связанным с изменением ракурса восприятия и проектированием трехмерных объектов на плоскость изображения. Этот метод получил название метода инвариантного распознавания [38, 116]. В основе второго метода лежат алгоритмы логического описания классов распознаваемых объектов (режим обучения) с последующим логическим анализом изображения реальной обстановки (режим принятия решений). Описание этого логико-аксиоматического метода распознавания содержится в работах [9, 108, 119, 123]. Результаты распознавания используются для целеуказания объектов, подлежащих манипулированию или транспортировке, а также для уточнения геометрической модели окружающей робота среды. При построении модели среды (в частности, модели препятствий) существенно используется также информация от ультразвуковых датчиков ближнего и дальнего действия.
В общем случае полная геометрическая модель среды сложна, и обработка содержащейся в ней информации в реальном времени затруднительна. Поэтому для построения безопасного маршрута движения шасси робота используется упрощенная плоская модель, представляющая собой проекцию всех объектов, окружающих робот, на опорную плоскость. При автоматическом программировании движений бортового манипулятора приходится учитывать пространственную модель препятствий с целью обеспечения возможности их обхода.
Методы и алгоритмы построения оптимального безопасного маршрута для шасси робота и программирования движений для бортового манипулятора подробно описаны в гл. 2, а также в работах [14, 23, 42, 68, 81, 107, 112, 113, 119]. Эти алгоритмы допускают простую программно-аппаратурную реализацию и могут использоваться в реальном масштабе времени. Важным достоинством разработанных алгоритмов является их гибкость и адаптивность по отношению к заранее неизвестным препятствиям,
Программные движения шасси и манипулятора поступают в систему серворегуляторов приводов исполнительных механизмов робота, цель которой заключается в том, чтобы обеспечить их фактическую отработку. Однако точное осуществление программных движений практически невозможно из-за наличия разного рода возмущений и не определенностей, существенно влияющих на динамику робота. К ним относятся непредсказуемый дрейф параметров приводов и исполнительных механизмов, изменение нагрузки на шасси и т. п. Для компенсации этих возмущений и не определенностей обычные законы стабилизации программных движений, реализуемые в серворегуляторах приводов, должны быть дополнены алгоритмами самонастройки.
Важный класс алгоритмов самонастройки составляют рекуррентные и много шаговые (аксельрантные) конечно-сходящиеся алгоритмы решения эстиматорных неравенств, определяющих близость реального и программного движений [107, 109, 131, 141]. Если эстиматорные неравенства нарушены, эти алгоритмы обеспечивают автоматическую настройку (самонастройку) пара-метров серворегуляторов таким образом, чтобы реальное движение робота отслеживало программное движение с наперед заданной точностью.
Конечная сходимость алгоритмов самонастройки означает, что время адаптации, т. е. общее время нарушения эстиматорных неравенств, у них конечно. Это обстоятельство существенно используется при алгоритмическом конструировании и расчете параметров адаптивных регуляторов исполнительных приводов. Наилучшими показателями по быстродействию и точности идентификации неизвестных параметров обладают оптимальные аксельрантные алгоритмы, описанные в гл. 3, а также в работах [107, 109 и др.].
Описанные алгоритмы адаптивной обработки информации и интеллектуального управления были реализованы в виде пакета программных модулей для ЭВМ "Одра-1204", управляющей макетом манипуляционно-транспортного робота "Адаптрон-3". Этот пакет имеет иерархическую структуру, представленную на рис. 6.18.
Программный модуль планирования поведения и координации действий вырабатывает план операций и координацию работы остальных модулей в соответствии с полученным от человека-оператора заданием. Модуль распознавания и анализа обстановки идентифицирует целевые объекты, подлежащие манипулированию или транспортировке, распознает препятствия и указывает их местоположение по отношению к роботу. Модуль моделирования среды использует полученную информацию для уточнения модели среды. Перечисленные модули относятся к стратегическому уровню управления. На тактическом уровне процессы обработки информации распараллеливаются: один модуль строит оптимальный маршрут и безопасную программную траекторию шасси, другой - оптимальное программное движение манипулятора. Далее вступают в действие модули, формирующие законы адаптивного программного управления исполнительными приводами шасси и бортового манипулятора. Эти модели обеспечивают отработку оптимального маршрута движения шасси и программного движения манипулятора с заданной точностью в условиях неполной информации о параметрах среды (сцепление с грунтом, масса и конфигурация объекта манипулирования и т. п.) и двигательной системы робота (коэффициенты трения в редукторах, распределение нагрузки на шасси и т. п.). На этом же уровне осуществляется управление датчиками информационно-навигационной системы с целью получения необходимой информации о среде, местоположении и ориентации робота и состоянии его исполнительных механизмов. Эта информация накапливается и передается для использования другими программными модулями.
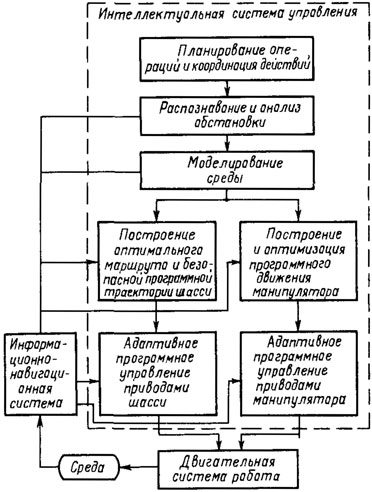
Рис. 6.18. Иерархическая структура интеллектуальной системы управления робота 'Адаптрон-3'
В целях облегчения отладки отдельных модулей и организации их взаимодействия в процессе интеллектуального управления, а также для обеспечения контроля за функционированием робота со стороны человека-оператора разработаны специальные диалоговые средства работы с пакетом управляющих программ. В состав этих средств входят монитор и пульт целеуказания и управления, изображенный на рис. 6.17.
Как показали эксперименты с роботом "Адаптрон-3", для реализации комплекса управляющих программ в полном объеме необходимо использовать специализированные управляющие ЭВМ с быстродействием около 50 тыс. операций в секунду и объемом оперативной памяти порядка 50-100К слов. Требования к управляющей ЭВМ могут быть ослаблены путем реализации отдельных программных модулей на микропроцессорах. В связи с этим возникает необходимость в разработке мультимикропроцессорной архитектуры для реализации интеллектуального управления манипуляционно-транспортным роботом в реальном масштабе времени.
Научные исследования и опытно-конструкторские разработки в области создания манипуляционно-транспортных роботов для ГАП интенсивно ведутся как в СССР, так и за рубежом. Так, в центральном научно-исследовательском институте робототехники и технической кибернетики (ЦНИИ РТК) при Ленинградском политехническом институте созданы опытные образцы подвижных промышленных роботов, ориентированных на выполнение транспортных и погрузочных операций. Рассмотрим особенности этого семейства роботов на примере манипуляционно-транспортного робота МП-12Т.
Робот МП-12Т представляет собой самоходную тележку с четырехколесным шасси, на борту которой находится автоматический манипулятор. Конструкция тележки и манипулятора модульная, что позволяет в зависимости от производственной необходимости изменять конфигурацию робота. Грузоподъемность манипулятора 20 кг, а грузоподъемность тележки 200 кг. Робот имеет шесть степеней свободы. Скорость перемещения тележки не превышает 0,7 м/с. Габаритные размеры тележки 1500*1000*1500. Робот получает питание от аккумуляторных батарей, обеспечивающих ему возможность непрерывной работы в течение 8 ч.
Информационная система размещена непосредственно на роботе. Трасса движения задается с помощью светоотражающей полосы. Для наведения на трассу используются фотодатчики. Сигналы обратной связи от этих датчиков поступают в сервоприводы ведущих колес, обеспечивающих перемещение робота вдоль трассы-полосы. Бортовая система адаптивного управления реализована на базе микроЭВМ "Электроника-60". Элементы интеллекта робота закладываются в программное обеспечение. Система управления робота имеет иерархическую структуру, включающую следующие программно-аппаратные модули:
- локального управления исполнительными приводами тележки и манипулятора;
- расчета программы манипулирования грузами;
- планирования очередности и объема операций по загрузке - разгрузке технологического оборудования;
- контроля за правильностью функционирования робота и обслуживаемого им оборудования.
Первые два модуля разработаны на основе микропроцессорных контроллеров единой серии технических средств локальных информационно-управляющих систем. Остальные модули реализованы в виде управляющих программ для бортовой микроЭВМ "Электроника-60". Система управления робота МП-12Т рассчитана на выполнение в автоматическом режиме следующих операций:
- погрузочно-разгрузочные операции на складе и при обслуживании технологического оборудования;
- транспортировка грузов по предварительно проложенной трассе;
- распознавание объектов манипулирования, планирование и координирование действий.
Рассмотрим особенности функционирования погрузочно-разгрузочного транспортного робота МП-12Т на примере транспортировки на рабочие места тары с заготовками и перевозки готовой продукции на автоматический склад. Склад оборудован загрузочными и разгрузочными конвейерами, которые подают тару с заготовками и принимают тару с готовыми изделиями. Установку и снятие тары (палеты) с тележки осуществляет бортовой манипулятор. Платформа тележки оснащена датчиками наличия тары, а также фотодатчиками, обеспечивающими движение робота вдоль трассы, выполненной в виде светоотражающей полосы.
Алгоритм функционирования робота МП-12Т в условиях РТК механической обработки заключается в следующем. Сначала проверяется необходимость разгрузки тележки по информации от датчиков наличия тары на платформе и на разгрузочном транспортере. Если транспортер свободен, тележка разгружается и продолжает движение по трассе в соответствии с заданным планом обслуживания оборудования РТК. На складе тара с заготовками маркируется следующим образом: каждой палете присваивается номер того рабочего места, куда она должна быть доставлена. Робот получает сигнал от загрузочного транспортера и загружается в соответствии с палетой со склада.
При доставке тары с заготовками со склада тележка автоматически останавливается у того рабочего места, номер которого совпадает с номером транспортируемой палеты. В момент остановки определяется положение и ориентация тележки относительно обслуживаемого оборудования, и манипулятор сгружает палету. Если требуется еще и разгрузить рабочее место (о чем свидетельствует световой сигнал), то после проверки наличия свободных ячеек на платформе манипулятор загружает тару с готовой продукцией в свободную ячейку. В том случае, если свободных ячеек не хватает, робот продолжает движение по маршруту и запоминает номера рабочих мест, подлежащих разгрузке.
По мере разработки и отладки указанных модулей предполагается расширять функциональные возможности промышленных роботов типаМП-12Т посредством введения в их систему управления элементов (алгоритмов) адаптации и искусственного интеллекта в соответствии с конкретными нуждами ГАП.
Автоматизация манипуляционно-транспортных операций требует разработки видео датчиков и связанных с ними средств распознавания и интерпретации производственной обстановки. В качестве датчиков видеосигналов в манипуляционно-транспортных роботах обычно используются телекамеры, фотодиоды и лазеры. Системы распознавания и интерпретации видеоинформации реализуются в виде программного обеспечения систем автоматического управления роботов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'