1.2. Краткая история робототехники
Об искусственных разумных помощниках люди мечтали давно. Вначале эти мечты воплощались только в сказках, преданиях, легендах. Например, в одном из древнегреческих мифов хромой бог огня и кузнечного ремесла Гефест для помощи себе при ходьбе создал двух рабынь из золота. Он же изобрел бытовых роботов в виде золотых треножников, которые могли выполнять простейшие, задаваемые на естественном языке команды типа: принести, подать, унести. Такие роботы прислуживали древнегреческим богам при их пиршествах на Олимпе.
Однако из-за низкого технологического уровня развития древних цивилизаций подобные идеи находили не техническое, а социальное выражение. Происходило закабаление человека человеком, общество расслаивалось на классы, одни люди подчиняли себе других, возникло рабство. Для рабовладельца раб был говорящим орудием, т. е. интеллектуальным роботом. Но ведь объективно раб не робот, а человек и иногда более развитый, чем его хозяин (достаточно вспомнить баснописца Эзопа, философа Эпиктета и др.). Рабы восставали против угнетателей и в конце концов сломали рабовладельческую формацию.
В эпоху феодализма идея искусственных разумных помощников людей стали искать себе не только социальное, но и техническое воплощение. Известно, например, предание о человекоподобном слуге, которого создал средневековый философ Альберт Великий. Начали появляться различные механические автоматы на основе часовых устройств.
Наибольшее распространение такие автоматы получили в XVII-XVIII веках. Они создавались для имитации поведенческих актов животных и людей. Известна, например, искусственная утка французского механика Жака Вокансона, которая подобно живой утке могла прыгать, плескаться в воде, крякать, клевать и даже переваривать пищу при помощи скрытых внутри нее химических веществ. Известны также человекоподобные автоматы-андроиды, такие, как "Флейтист" Вокансона и механический писец швейцарского часовщика Анри Дро. Имея человеческий облик, андроиды выполняли некоторые довольно сложные действия. Например, "Флейтист" исполнял 11 различных мелодий, перебирая пальцами отверстия и клапанный механизм флейты.
В XIX в. робототехническая идея проявила себя в виде паровых андроидов, а в первой половине XX в. - в виде ряда электромеханических и электронных устройств. В 1920 г. появился и сам термин "робот". Его предложил чешский писатель Карел Чапек, назвав роботами искусственных людей в одной из своих пьес. Термин прижился и используется сейчас практически во всех развитых странах.
С появлением кибернетики начался принципиально новый этап поиска путей создания человекоподобных автоматов. Если раньше андроиды и различные имитационные модели животных строились без учета обратной связи, то кибернетические модели, такие как гомеостат Эшби, черепаха Уолтера, животное Гопкинса и т. п., обратную связь использовали. Последнее обстоятельство позволило не только существенно приблизить поведение технических устройств к поведению моделируемых ими животных, но и убедило исследователей в том, что мечта об искусстве иных разумных помощниках людей имеет материалистическую основу, а кибернетика предлагает вполне реальный путь ее осуществления.
К началу 60-х гг. появились все основные компоненты кибернетической модели робота. Независимо друг от друга были созданы дешевые и быстродействующие ЭВМ (мини-ЭВМ), весьма развитая воспринимающая телевизионная аппаратура и большое количество разнообразных сенсорных датчиков, а также универсальные манипуляционные системы, первоначально разработанные механиками для дистанционной работы с радиоактивными веществами. Американский ученый Генри Эрнст впервые соединил эти компоненты друг с другом и получил автоматически действующую под управлением ЭВМ механическую руку. Устройства, подобные этой руке, впоследствии были названы промышленными роботами (ПР).
Один из первых практически используемых промышленных роботов "Юнимейт" создан американской фирмой Юнимешн в 1962 г. Эта фирма была основана Девшем и Энгельбергером в 1956 г., и некоторые историки науки считают этот год годом зарождения современной робототехники. Механическая рука робота "Юнимейт" могла перемещаться так, как это показано на рис. 1.7.
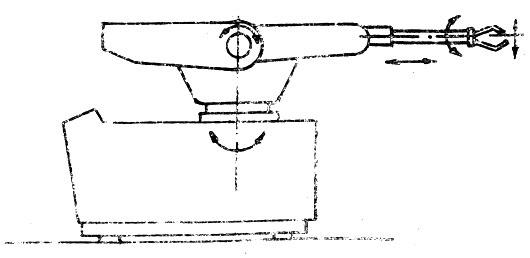
Рис. 1.7
В том же 1962 г. другая американская фирма АМФ выпустила свой промышленный робот "Версатран". Его механическая рука могла перемещаться по вертикали и вокруг нее, а также по горизонтали и вокруг своей оси (рис. 1.8).
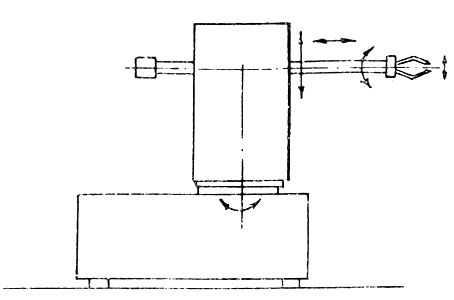
Рис. 1.8
Первые отечественные промышленные роботы, использовавшиеся на производстве, появились в 1971 г. Это прежде всего УМ-1, "Универсал-50", УПК и др.
Нужно отметить, что за прошедшие 27 лет развития современной робототехники появилось много различных типов промышленных роботов. Активно разрабатывались очувствленные роботы второго поколения. Велись исследования принципов построения интеллектуальных роботов третьего поколения. Однако промышленные роботы первого поколения типа "Версатран" и "Юнимейт" выпускаются и широко используются до сих пор.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'