1. Идеи, лежащие в основе робототехники
1.1. Роботы - принципиально новый класс машин
В процессе трудовой деятельности люди вынуждены взаимодействовать с внешней средой. Характер такого взаимодействия весьма разнообразен. В непосредственном варианте его можно схематически изобразить так, как это показано на рис. 1.1.
Рис. 1.1
Очевидно, что в общем случае подобное взаимодействие может быть не только трудным, но и физически непосильным. Поэтому для облегчения своего труда, повышения его качества и производительности люди с незапамятных времен изобретали различные инструменты, механизмы, машины. С целью более глубокого познания свойств окружающего мира изобретались приборы и устройства, расширяющие не только физические, но и информационные возможности людей. Более того, в середине XX в. появился новый класс машин - электронные вычислительные машины (ЭВМ), усиливающие интеллектуальные возможности человека. Иными словами, до самого последнего времени люди как бы увеличивали свои естественные способности, но не устраняли себя полностью из производственного цикла взаимодействия с внешней средой (рис. 1.2). Исключение, быть может, составили некоторые легко автоматизируемые процессы.
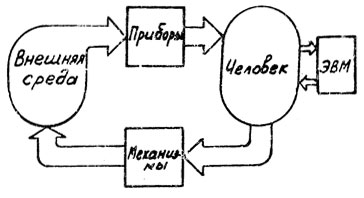
Рис. 1.2
Однако в 50-60 гг. нашего века появился ряд производств, где присутствие человека оказалось либо вредным для него самого, либо являлось препятствием для повышения производительности труда. Примером могут служить ядерная энергетика, химическая промышленность, микроэлектроника и т. п. В связи с этим возникла принципиально новая задача, связанная не с "достройкой" человека в контуре взаимодействия с внешней средой, как это изображено на рис. 1.2, а с поиском способов его полной замены в технологическом процессе некоторым антропоморфным (человекоподобным) автоматам, называемым роботом (рис. 1.3).
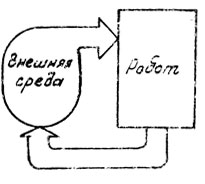
Рис. 1.3
Ввиду антропоморфности при создании роботов необходимо использовать кибернетические идеи общности законов получения, обработки и передачи информации в таких сложных управляющих системах, как машина, живой организм, общество. С точки зрения этих идей кибернетическая модель животного и человека представляет собой совокупность сенсорной (чувствительной), центральной (обрабатывающей) и эффекторной (исполнительной) систем. Рецепторные элементы сенсорной системы (СС) воспринимают сигналы внешней среды. Эти сигналы распознаются и обрабатываются центральной нервной системой (ЦНС). В результате обработки формируются адекватные внешним воздействиям реакции, которые реализуются эффекторной системой (ЭС) (рис. 1.4, а).
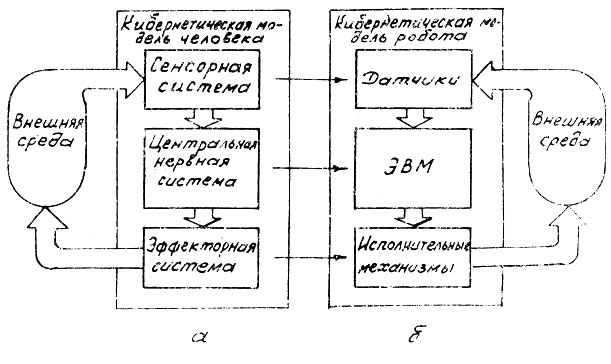
Рис. 1.4
Многие технические устройства долгое время развивались независимо от проблем робототехники. Однако в начале 60-х годов стало ясно, что различные телевизионные и локационные устройства, различные системы датчиков и сенсорных элементов могут служить техническими аналогами сенсорных систем. Аналогами эффекторных систем могут быть снабженные двигателями исполнительные механизмы и, прежде всего, манипуляторы и педипуляторы, воспроизводящие движения рук и ног человека. Аналогом ЦНС может служить специальным образом запрограммированная или специальным образом сконструированная ЭВМ. Следовательно, соединяя соответствующие аналоги друг с другом по образу кибернетической модели животного и человека, получим кибернетическую модель робота, способного автоматически взаимодействовать с внешней средой (рис. 1.4, б).
Одна из возможных реализаций подобной кибернетической модели показана на рис. 1.5, где изображен внешний вид адаптивного автономного транспортного робота, управляемого бортовой ЭВМ. Этот робот снабжен телекамерой (ТК), тактильными датчиками (Д), манипулятором (М) и колесной тележкой (Т). Важной особенностью робота является то, что в целом он обладает антропоморфными свойствами и принципиально отличается от известных ранее устройств, в частности тех, которые его составляют. Действительно, если найти место ЭВМ, манипуляционных (грузоподъемных) машин и собственно робота в трехмерном пространстве таких человеческих свойств, как интеллект, универсальность, грузоподъемность (физическая сила), то легко увидеть, что, в отличие, от своих двухмерных составных частей, робот в целом, как и человек, является трехмерным (рис. 1.6).
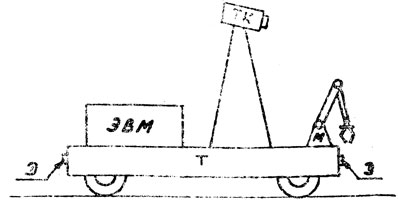
Рис. 1.5
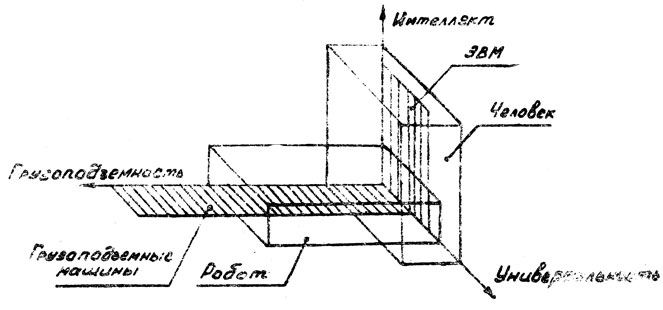
Рис. 1.6
Антропоморфизм роботов позволяет не только заменять ими людей в сложных и опасных технологических процессах, но и допускает их автономное функционирование в океане, в космическом пространстве, на других планетах. Бортовая ЭВМ в этом случае реализует функции искусственного интеллекта, а связь человека и робота осуществляется через проводной или беспроводной канал связи (КС).
Однако уровень интеллектуальности роботов в различных применениях не должен быть одним и тем же. Зачем, например, промышленному роботу, переставляющему в цехе болванки, сложный интеллект робота - исследователя планет солнечной системы? По этой причине промышленные роботы могут быть менее интеллектуальными и более специализированными на выполнение различных технологических операций.
Именно в направлении специализации к производственной среде развивается сейчас промышленная робототехника. Основное внимание в ней уделяется разработке эффективных структур промышленных роботов (ПР), универсальных и проблемно-ориентированных манипуляционных систем, различных типов приводных устройств, унифицированных модулей, универсальных и специализированных устройств управления программного типа.
При создании исследовательских роботов основное внимание уделяется разработке эвристических и бионических методов адаптивного управления, воспроизводящих эти методы вычислительных систем и структур, а также способам построения искусственного интеллекта таких роботов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'