3.2. Составные части и конструкция промышленных роботов
Из предыдущего материала следует, что основными составными частями ПР являются манипулятор и устройство управления. В свою очередь, каждая из этих частей включает ряд блоков, схематически изображенных прямоугольниками на рис. 3.2. Как видно из рисунка, манипулятор помимо собственно манипуляционной системы содержит рабочий орган, привод и устройство передвижения. Та часть устройства управления, которая вырабатывает управляющие сигналы для привода, рабочего органа, устройства передвижения, называется блоком управления. Последовательность таких управляющих сигналов формируется в ЭВМ на основании программы, предварительно записанной в нее оператором через систему связи, и с учетом сигналов, поступающих от датчиков информационно-измерительной системы.
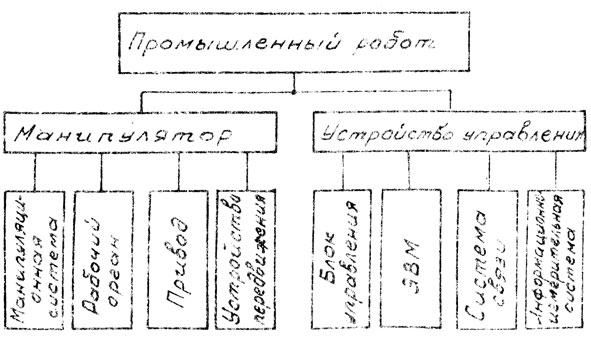
Рис. 3.2
Конструктивно манипулятор и устройство управления могут быть объединены в одной стойке, но могут быть выполнены раздельно и располагаться на некотором удалении друг от друга.
Компоновка манипулятора существенно зависит от выбранной системы координат его функционирования. С этой точки зрения различают манипуляторы, работающие в декартовой, цилиндрической, сферической и янгулярной (угловой) системах координат. Конструкция робота, естественно, зависит и от количества рук манипуляционной системы, управляемых одним и тем же устройством управления, а также от типа устройства передвижения.
В связи с тем, что в последние годы появилось большое число недорогих, компактных и довольно быстродействующих микроЭВМ и персональных компьютеров, возникла возможность все блоки устройства управления реализовать программно, связь оператора с ПР организовать через дисплей и рассматривать манипуляционную систему вместе с рабочим органом, приводом и устройством управления в качестве периферийного оборудования вычислительной машины. При таком подходе манипулятор и ЭВМ конструируются как отдельные устройства, подсоединяемые друг к другу при помощи стандартного интерфейса.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'