3.3. Технические характеристики промышленных роботов
Одна из возможных классификаций технических характеристик ПР приведена на рис. 3.3. В соответствии с этой классификацией все множество характеристик разделено на два подмножества - основных и дополнительных. Рассмотрим эти подмножества более подробно и приведем соответствующие характеристики ПР.
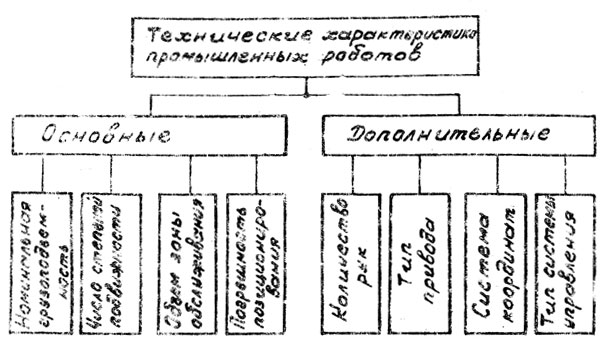
Рис. 3.3
Номинальная грузоподъемность робота определяется максимальной массой груза, с которой он может нормально работать. С этой точки зрения все ПР подразделяются на 5 классов, начиная со сверхлегких (используемых, например, в микроэлектронике) и кончая сверхтяжелыми манипуляционными и транспортными роботами. Общая классификация ПР по грузоподъемности Р приведена на рис. 3.4. Наибольшее распространение получили легкие и средние роботы. Например, общее количество ПР с грузоподъемностью от 5 до 80 кг в общем мироном парке роботов составляет примерно 65%.
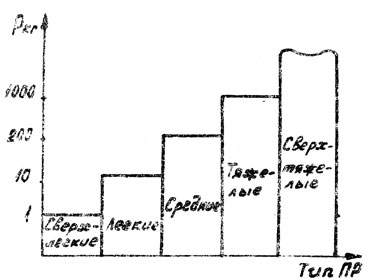
Рис. 3.4
Второй основной характеристикой ПР является число n степеней подвижности манипулятора. Классификация роботов по этому признаку имеет вид, показанный на рис. 3.5. Если n ≤ 3, то считается, что робот обладает малой подвижностью, при 4 ≤ n ≤ 6 - средней, а при n > 6 - высокой. Высокая подвижность необходима для повышения маневренности манипуляционной системы при обходе различных препятствий в рабочей зоне. Необходима она и для повышения универсальности и антропоморфности ПР, поскольку рука человека имеет 27 степеней свободы, 20 из которых приходятся на кисть и пальцы.
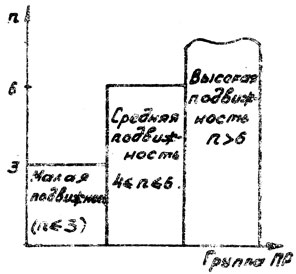
Рис. 3.5
В настоящее время наибольшее распространение имеют роботы средней подвижности (n = 4 ... 5). Их количество в мировом парке ПР оценивается примерно 63%, в то время как количество роботов высокой подвижности составляет всего лишь 2%. Связано это с тем, что при увеличении n усложняется конструкция манипулятора, усложняется управление им и возрастает стоимость робота.
Под объемом рабочей зоны (зоны обслуживания) понимается объем того пространства, в котором может перемещаться рабочий орган ПР. Классификация ПР по объему V рабочей зоны приведены на рис. 3.6. Из рисунка следует, что по этому признаку ПР разделяются на 5 классов. Причем количество роботов различных классов в мировом парке ПР различно. Так, микророботы составляют всего 4% этого парка, мини-роботы - 9%, малые роботы, или как их часто называют - роботы с ограниченной грузоподъемностью, составляют 30%, средние роботы - 45% м крупные роботы - 12%.
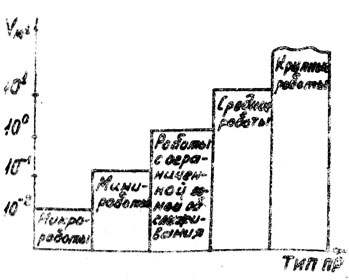
Рис. 3.6
Погрешность позиционирования определяется как абсолютная величина отклонения рабочего органа ПР от заданных программой точек позиционирования или от заданной траектории перемещения захвата. Примерно 70% современных ПР имеют абсолютную погрешность не выше ±1 мм. При сравнении роботов между собой используют понятие относительной погрешности позиционирования δ, учитывающей размеры зоны обслуживания.
Различают четыре класса точности ПР, от нулевого (δ < 10-2%) до третьего (δ > 10-1%) Они условно изображены на рис. 3.7 в виде прямоугольников разной высоты. Следует отметить, что погрешность позиционирования зависит от быстродействия манипулятора ПР так, что при увеличении быстродействия точность, как правило, падает.
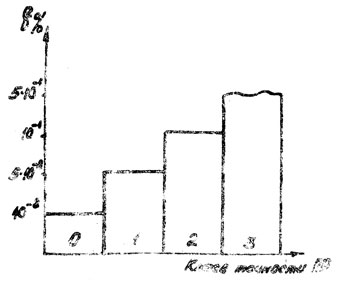
Рис. 3.7
В свою очередь, быстродействие манипулятора промышленного робота определяется линейной скоростью (υлi) его перемещения по отдельным степеням подвижности i = 1, 2, ..., n) и представляется в виде трех групп: малое (υл ≤ 0,5 м/с), среднее (0,5 м/с < υл ≤ 1 м/с) и высокое (1 м/с < υл < υmax), где υmax - максимально допустимая скорость. Примерно 20% мирового парка роботов имеют быстродействие, относящееся к третьей группе, остальные, в большинстве, имеют среднее быстродействие.
Переходя к рассмотрению дополнительных технических характеристик, прежде всего отметим, что ПР, как правило, имеют один манипулятор, но встречаются роботы с двумя, тремя и даже четырьмя манипуляторами. Манипуляторы обычно одинаковы, хотя есть роботы, у которых они специализированы на выполнение различных операций.
С точки зрения типа используемого привода различают ПР с пневмоприводом, гидроприводом, электроприводом я комбинированным приводом.
рублево успенское шоссе таунхаусы
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'