4. Манипуляционные системы промышленных роботов
4.1. Элементы манипуляционных систем
Манипуляционная система представляет собой совокупность связанных между собой звеньев, образующих пространственный механизм с разомкнутой кинематической цепью, причем первое звено является основанием манипулятора, а последнее соединено с рабочим органом, непосредственно взаимодействующим с объектом манипулирования.
Под звеном понимается деталь или совокупность деталей, которые в процессе перемещения остаются жесткими, т. е. не изменяют размеров и формы.
Первое неподвижное звено манипуляционной системы называется стойкой, или основанием.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называют кинематической парой или просто парой.
Отдельное звено, как абсолютно твердое тело, имеет 6 степеней свободы: три независимых поступательных движения в направлении осей X, Y, Z и три вращательных относительно их движения, определяемых углами Эйлера γ, θ, φ. Совокупность линейных и полярных координат х, y, z, γ, θ, φ называется обобщенными координатами.
В свою очередь минимальное количество обобщенных координат, полностью определяющих положение и возможные направления движения тела, называют числом его степеней свободы, или степеней подвижности.
Несвязанное звено имеет максимальное число степеней свободы, равное шести. Каждая связь уменьшает это число. Следовательно, если таких связей L, то число степеней свободы связанного звена определяется соотношением
где W - число степеней свободы звена; L - число условий связи, или ограничений.
В зависимости от числа ограничений L ∈ {1, 2, 3, 4, 5} различают кинематические пары первого, второго, третьего, четвертого и пятого классов. Причем пары 1 и 2-го классов, имеющие соответственно 5 и 4 степеней свободы, очень сложны, и в манипуляционных системах не используются.
Примером кинематической пары 3-го класса (W = 3, L = 3) может служить шаровой шарнир, изображенный на рис. 4.1, а. На структурных и кинематических схемах эта пара, состоящая из цилиндрического звена и шара со штоком, обозначается так, как показано на рис. 4.1, б.
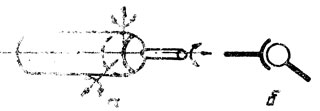
Рис. 4.1
В качестве примера кинематической пары 4-го класса (W = 2, L = 4) можно привести цилиндрическое соединение звеньев, показанное на рис. 4.2, а. Здесь возможны лишь два движения: поступательное и вращательное. Обозначается эта пара так, как показано на рис. 4.2, б, и называется цилиндрической парой.
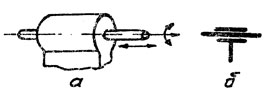
Рис. 4.2
Кинематических пар 5-го класса (W = 1, L = 5) известно несколько. Одна из них, вращательная, изображена на рис. 4.3, а. Фактически это плоское шарнирное соединение, обозначаемое так, как показано на рис. 4.3, б. Другой тип вращательной пары показан на рис. 4.4, а, а на рис. 4.4, б приведено ее условное графическое обозначение.
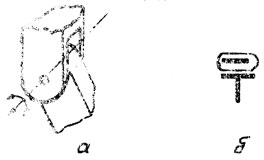
Рис. 4.3
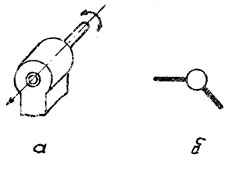
Рис. 4.4
Среди кинематических пар 5-го класса известны поступательная пара (рис. 4.5, а, б) и винтовая пара (рис. 4.6, а, б). Причем винтовая пара имеет два движения: поступательное и вращательное. Однако эти движения взаимосвязаны, поэтому данная пара относится не к 4-му, а к 5-му классу.
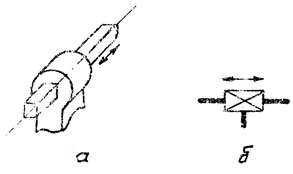
Рис. 4.5
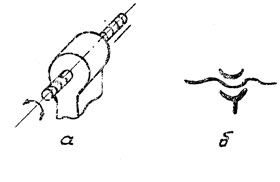
Рис. 4.6
Следует отметить, что кинематические пары высокого класса могут быть синтезированы из пар более низкого, в частности, 5-го класса. Например, шаровой шарнир (рис. 4.1) можно заменить совокупностью вращательной пары (рис. 4.4) и двух плоских шарниров (рис. 4.3).
Неподвижное (жесткое) соединение звеньев (W = 0, L = 6) обозначают так, как показано на рис. 4.7, а. На рис. 4.7, б и в показаны принятые на структурных и кинематических схемах обозначения неподвижных закреплений стойки. На рис. 4.7, г приведено обозначение захвата манипулятора с подвижными, а на рис. 4.7, д с неподвижными губками.

Рис. 4.7
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'